
介入式主动操控智能轮椅的控制系统及方法.pdf

丹烟****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

介入式主动操控智能轮椅的控制系统及方法.pdf
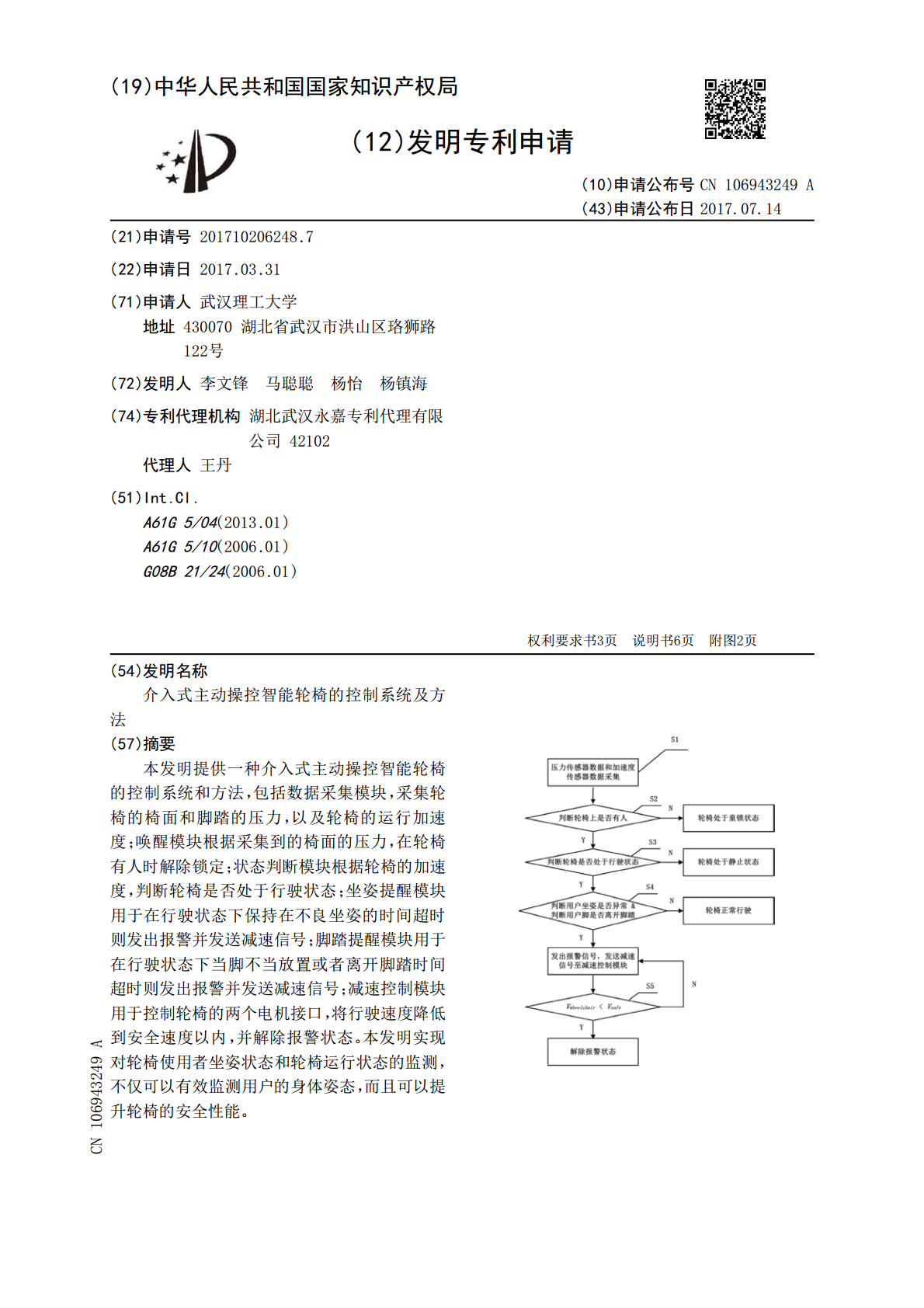
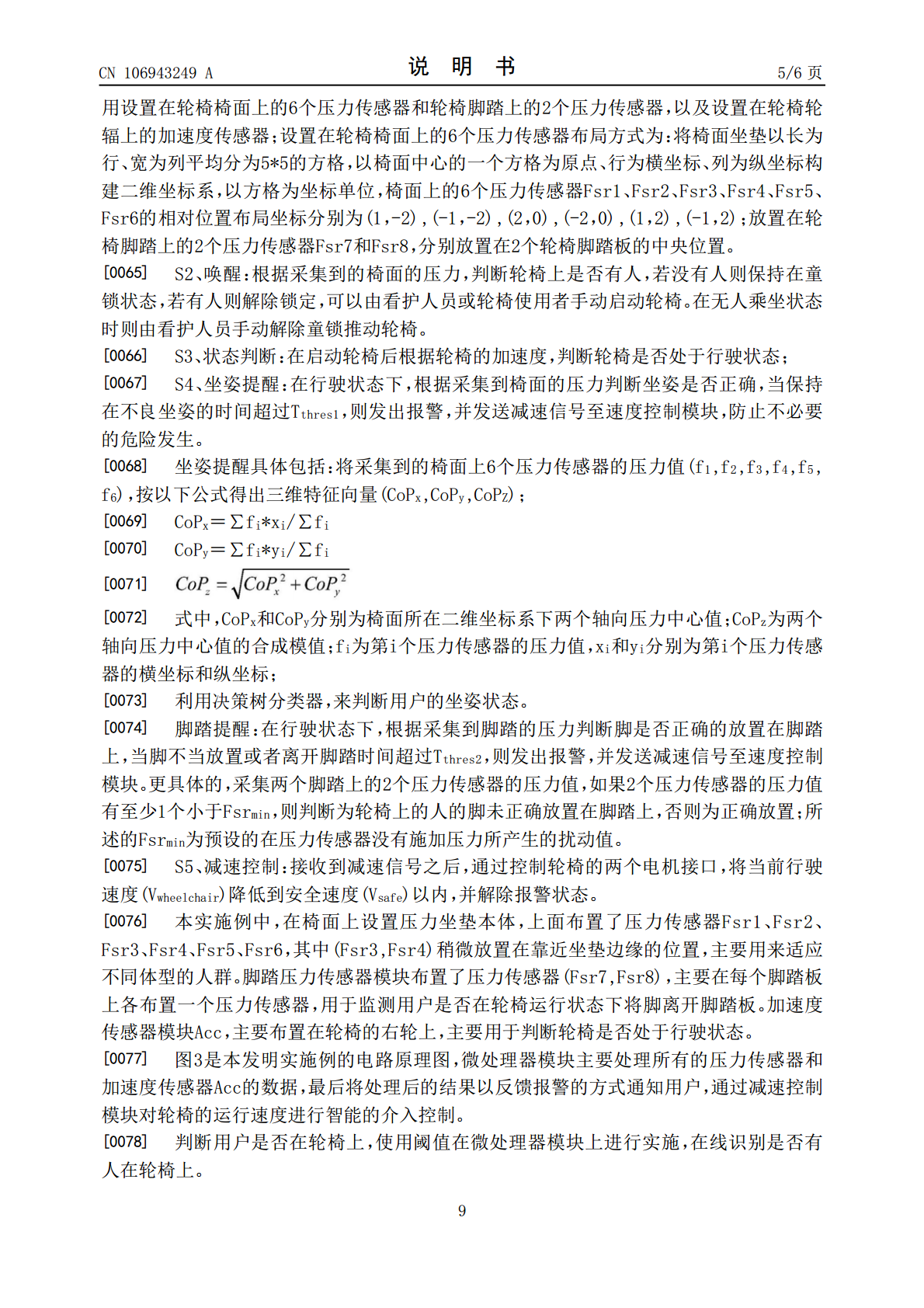
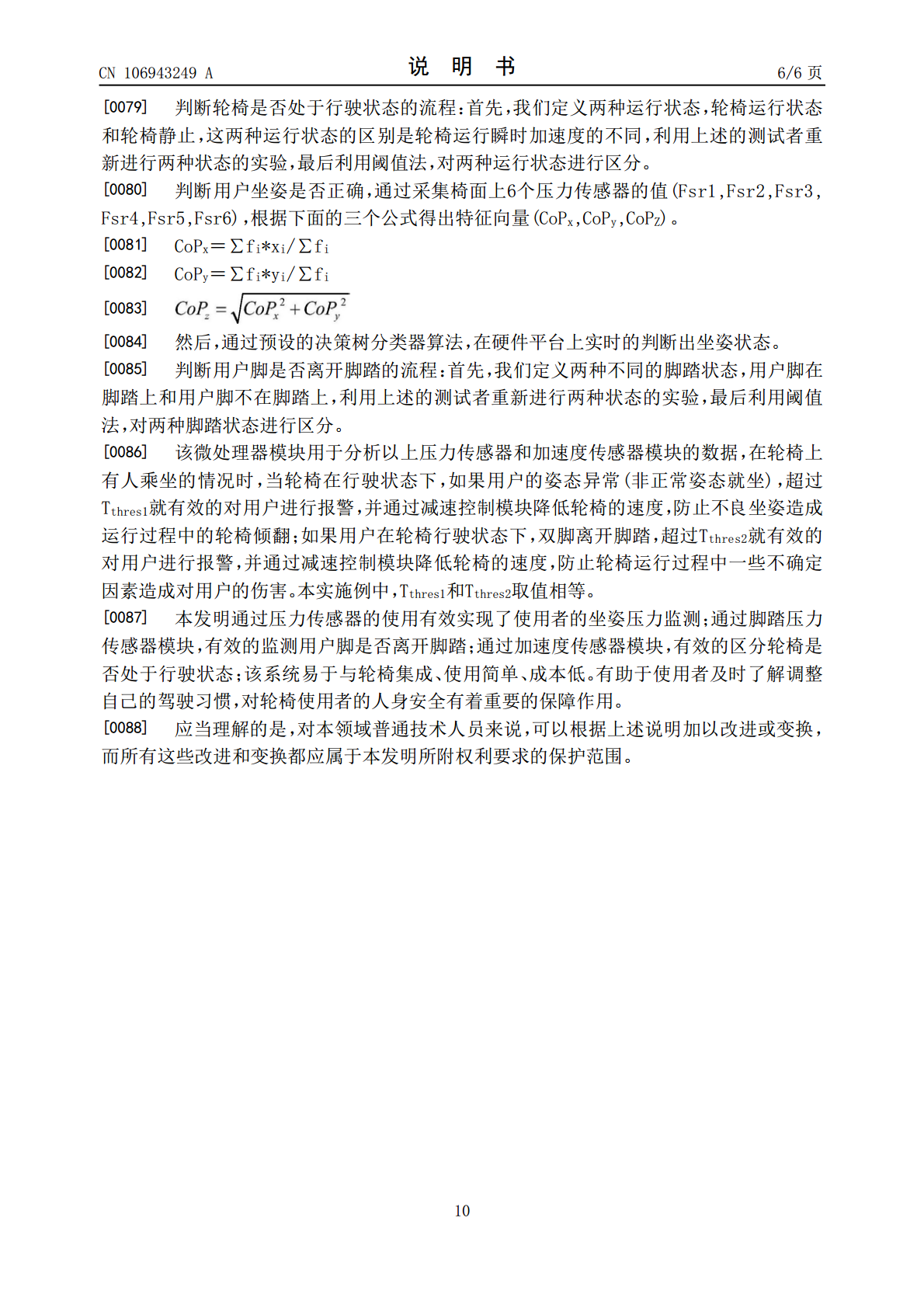
本发明提供一种介入式主动操控智能轮椅的控制系统和方法,包括数据采集模块,采集轮椅的椅面和脚踏的压力,以及轮椅的运行加速度;唤醒模块根据采集到的椅面的压力,在轮椅有人时解除锁定;状态判断模块根据轮椅的加速度,判断轮椅是否处于行驶状态;坐姿提醒模块用于在行驶状态下保持在不良坐姿的时间超时则发出报警并发送减速信号;脚踏提醒模块用于在行驶状态下当脚不当放置或者离开脚踏时间超时则发出报警并发送减速信号;减速控制模块用于控制轮椅的两个电机接口,将行驶速度降低到安全速度以内,并解除报警状态。本发明实现对轮椅使用者坐姿状
多功能智能操控式轮椅.pdf
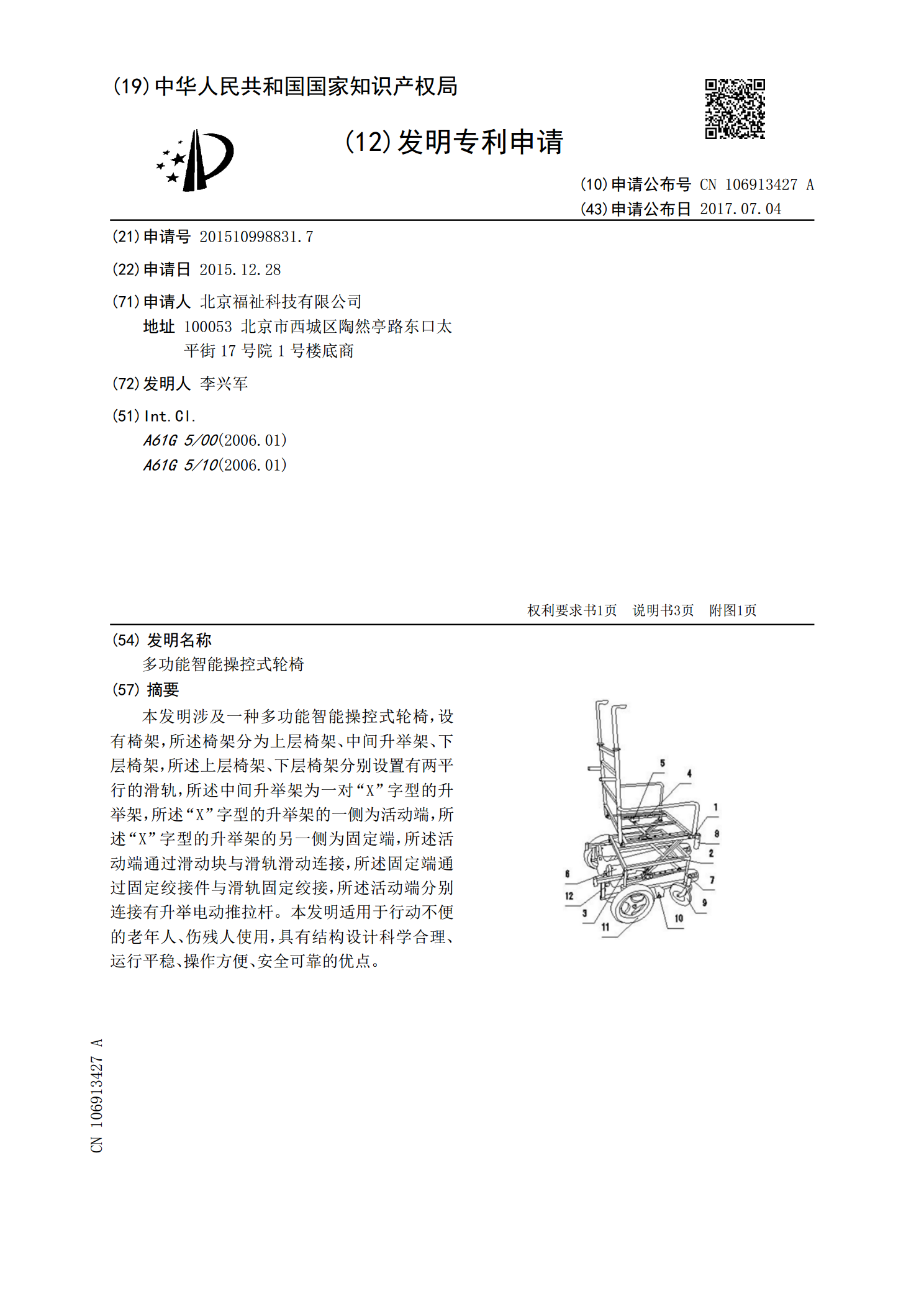
本发明涉及一种多功能智能操控式轮椅,设有椅架,所述椅架分为上层椅架、中间升举架、下层椅架,所述上层椅架、下层椅架分别设置有两平行的滑轨,所述中间升举架为一对“X”字型的升举架,所述“X”字型的升举架的一侧为活动端,所述“X”字型的升举架的另一侧为固定端,所述活动端通过滑动块与滑轨滑动连接,所述固定端通过固定绞接件与滑轨固定绞接,所述活动端分别连接有升举电动推拉杆。本发明适用于行动不便的老年人、伤残人使用,具有结构设计科学合理、运行平稳、操作方便、安全可靠的优点。

智能感知轮椅的操控系统及智能轮椅的控制方法.pdf
智能感知轮椅的操控系统及智能轮椅的控制方法,涉及医疗机械领域,用于解决对轮椅自身信息的采集及控制问题,要点是包括操控器,所述操控器与计算机处理单元相接,所述计算机处理单元包括传感器模块、驱动模块和人机交互模块,所述传感器模块包括内部状态感知模块和外部环境状态感知模块,所述内部状态感知模块通过姿态传感器确定轮椅使用者的姿态信息,所述外部环境状态感知模块分别通过编码器的位移速度和距离获得自定位信息,效果是通过感知模块可以检测到轮椅上使用者的信息和外部环境的信息,进而便于轮椅自行判断前行路线,防止发生碰撞,利于
一种头戴式眼电操控的智能轮椅及其控制方法.pdf
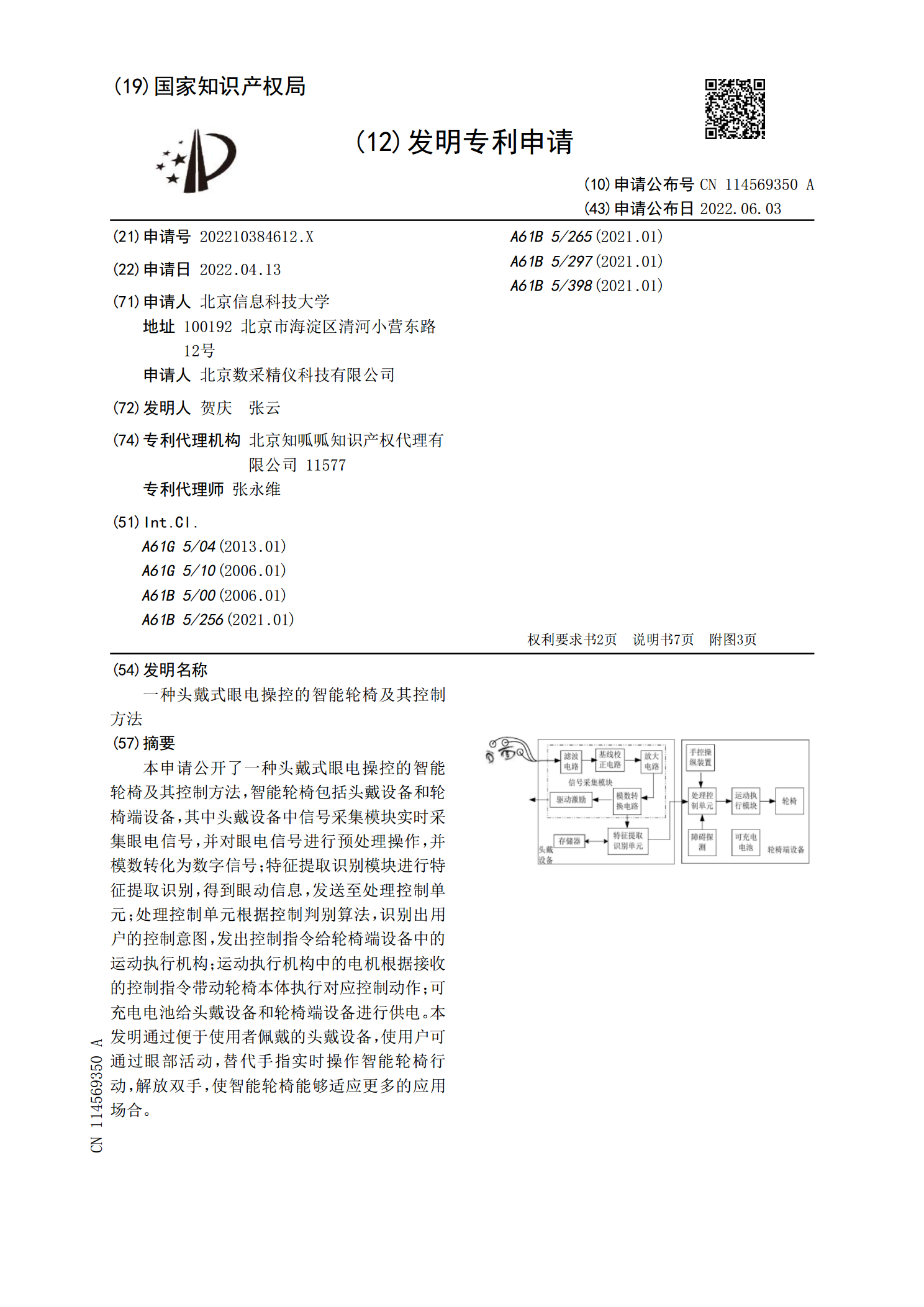
本申请公开了一种头戴式眼电操控的智能轮椅及其控制方法,智能轮椅包括头戴设备和轮椅端设备,其中头戴设备中信号采集模块实时采集眼电信号,并对眼电信号进行预处理操作,并模数转化为数字信号;特征提取识别模块进行特征提取识别,得到眼动信息,发送至处理控制单元;处理控制单元根据控制判别算法,识别出用户的控制意图,发出控制指令给轮椅端设备中的运动执行机构;运动执行机构中的电机根据接收的控制指令带动轮椅本体执行对应控制动作;可充电电池给头戴设备和轮椅端设备进行供电。本发明通过便于使用者佩戴的头戴设备,使用户可通过眼部活动

基于头部摆动的智能轮椅操控系统.pdf
本发明涉及一种基于头部摆动的智能轮椅操控系统,其该系统包括三轴加速度计、加速微处理器、蓝牙模块、程序运算微处理器以及轮椅电机,三轴加速度计连接加速微处理器,该加速微处理器通过蓝牙模块无线连接程序运算微处理器,该程序运算微处理器连接轮椅电机,发明结构简单、设计科学合理、成本低、操控灵活方便、制造简单。