
一种爪抱式尺蠖机器人.pdf

灵慧****89


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种爪抱式尺蠖机器人.pdf
本申请公开了爪抱式尺蠖机器人。本技术方案中,爪抱式尺蠖机器人包括动力躯干和二抓持器两大部分组成,动力躯干包括身臂机构和云台机构,抓持器包括凸轮机构、爪抱机构、齿轮传动机构、定位机构以及将上述机构联接的身架机构,工作可靠简单,仿生程度高,适用于管道攀爬和地面爬行两种情景。

一种起重机抱式挂爪.pdf
本发明公开了一种起重机抱式挂爪,包括:支撑板、挂孔、滑轮轴、滑轮、挂爪轴、右挂爪、左挂爪、锁定圈,所述的支撑板为2块圆形钢板,且所述的支撑板设有相应的圆孔,所述的挂孔位于支撑板上部,所述的滑轮轴通过螺丝连接在支撑板中心位置,所述的滑轮安装在滑轮轴上,所述的挂爪轴通过螺丝连接在支撑板下部,且所述的挂爪轴共2个,所述的右挂爪与所述的左挂爪均为L型结构,且所述的挂爪外侧设有阶梯齿,所述的锁定圈为口字型结构套在2个挂爪上,且所述的各个部件均由钢材制成,本发明具有使用方便、提高工作效率的优点。

用于竖井掘进水下机器人的抱爪式紧固装置.pdf
本发明公开了一种用于竖井掘进水下机器人的抱爪式紧固装置,包括底座(1)、水下机器人(2)、伸缩转动组件、抱爪(3)、预埋板(4)和定位板(5);预埋板固定安装在沉井结构底部的十字梁(6)的顶部中心,若干块定位板分别间隔设置在十字梁的底部;底座安装在水下机器人的底部,若干个抱爪分别通过伸缩转动组件可转动开合式安装在底座上;水下机器人下沉至十字梁上时能通过底座置于预埋板上,若干个抱爪能分别转动压紧在若干块定位板上,使水下机器人与十字梁对中设置。本发明能解决现有技术中水下机器人在水下安装时无法精准定位和紧固的问
自胀式尺蠖机器人.pdf
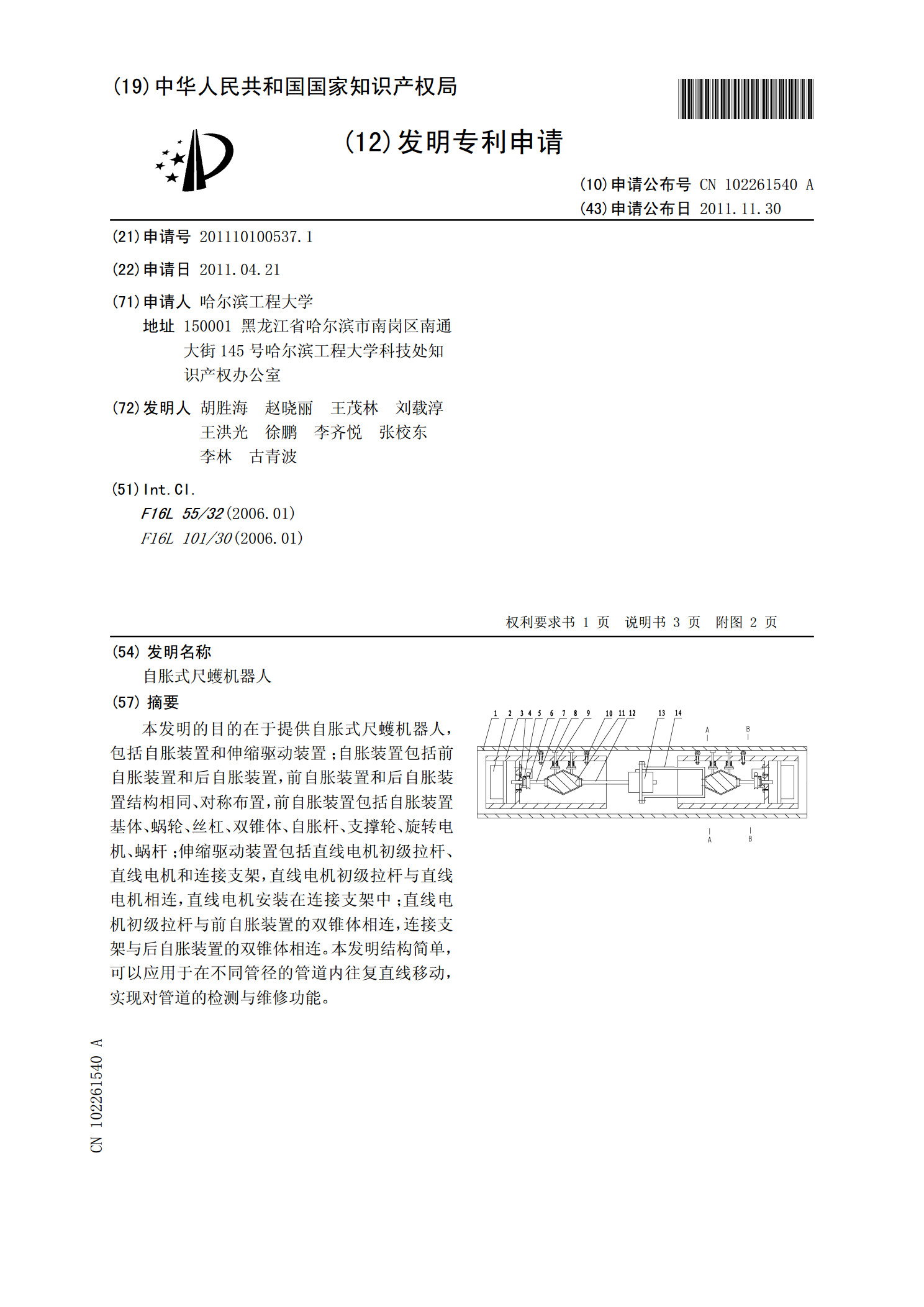
本发明的目的在于提供自胀式尺蠖机器人,包括自胀装置和伸缩驱动装置;自胀装置包括前自胀装置和后自胀装置,前自胀装置和后自胀装置结构相同、对称布置,前自胀装置包括自胀装置基体、蜗轮、丝杠、双锥体、自胀杆、支撑轮、旋转电机、蜗杆;伸缩驱动装置包括直线电机初级拉杆、直线电机和连接支架,直线电机初级拉杆与直线电机相连,直线电机安装在连接支架中;直线电机初级拉杆与前自胀装置的双锥体相连,连接支架与后自胀装置的双锥体相连。本发明结构简单,可以应用于在不同管径的管道内往复直线移动,实现对管道的检测与维修功能。

一种尺蠖式爬行机器人的研究的综述报告.docx
一种尺蠖式爬行机器人的研究的综述报告尺蠖是一种足类动物,可以进行快速移动和高效的跨越障碍物。由于其独特的运动能力,尺蠖已经成为机器人领域的一个热门研究方向,尺蠖式爬行机器人被广泛用于军事、医疗和民用等领域。尺蠖的运动方式主要包括波动运动和滚动运动。波动运动是指尺蠖通过身体的收缩来体现,即身体两端交替向前收缩,从而使身体向前移动。滚动运动是指尺蠖通过身体的卷曲运动来实现,即其中一端的身体往上卷曲,另一端的身体往下卷曲,从而使身体向前滚动。这两种运动方式使得尺蠖在不同的情况下都能完成运动任务,并具有很好的适应