
自胀式尺蠖机器人.pdf

冬易****娘子


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自胀式尺蠖机器人.pdf
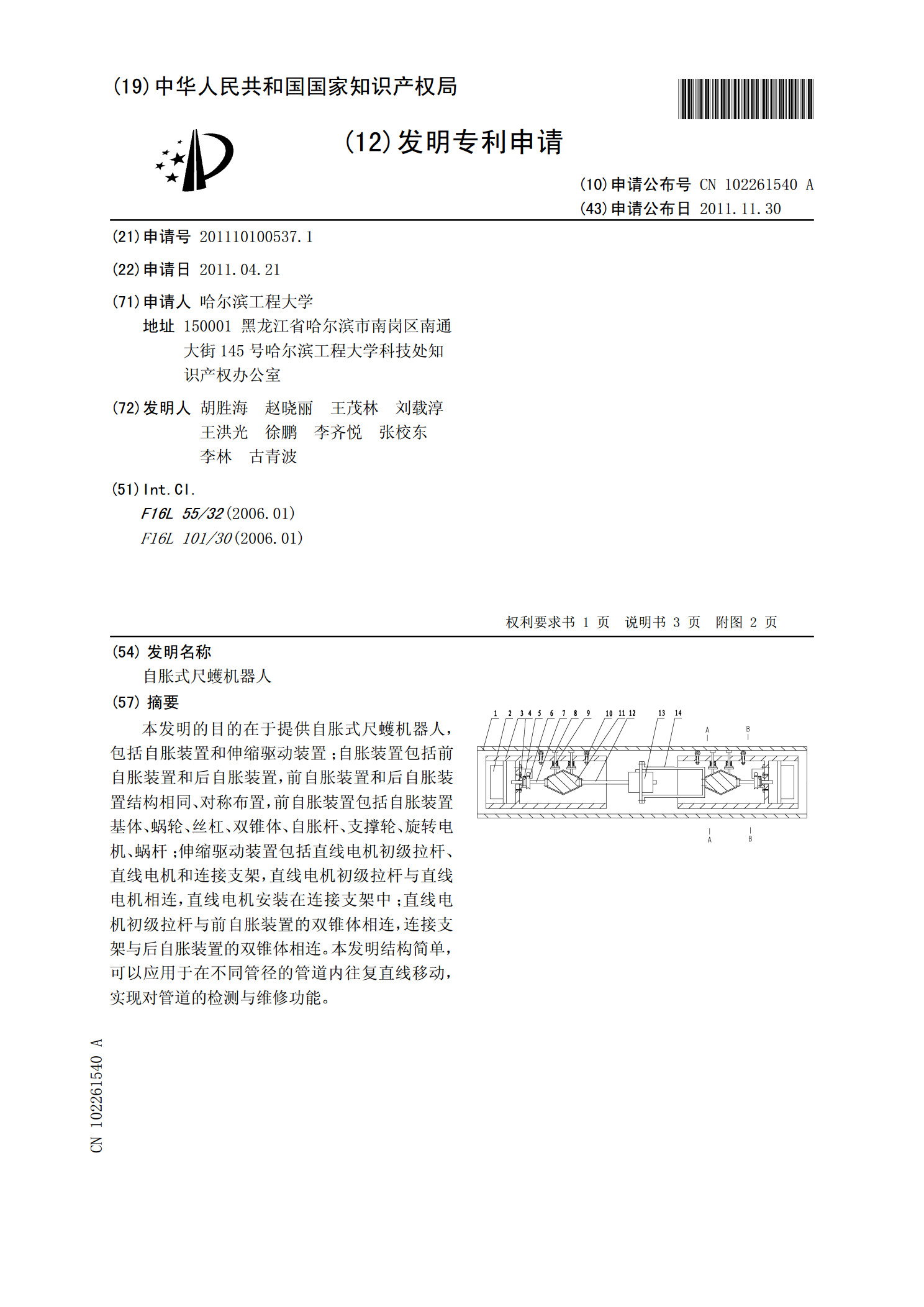
本发明的目的在于提供自胀式尺蠖机器人,包括自胀装置和伸缩驱动装置;自胀装置包括前自胀装置和后自胀装置,前自胀装置和后自胀装置结构相同、对称布置,前自胀装置包括自胀装置基体、蜗轮、丝杠、双锥体、自胀杆、支撑轮、旋转电机、蜗杆;伸缩驱动装置包括直线电机初级拉杆、直线电机和连接支架,直线电机初级拉杆与直线电机相连,直线电机安装在连接支架中;直线电机初级拉杆与前自胀装置的双锥体相连,连接支架与后自胀装置的双锥体相连。本发明结构简单,可以应用于在不同管径的管道内往复直线移动,实现对管道的检测与维修功能。
多节头自胀式锚杆.pdf
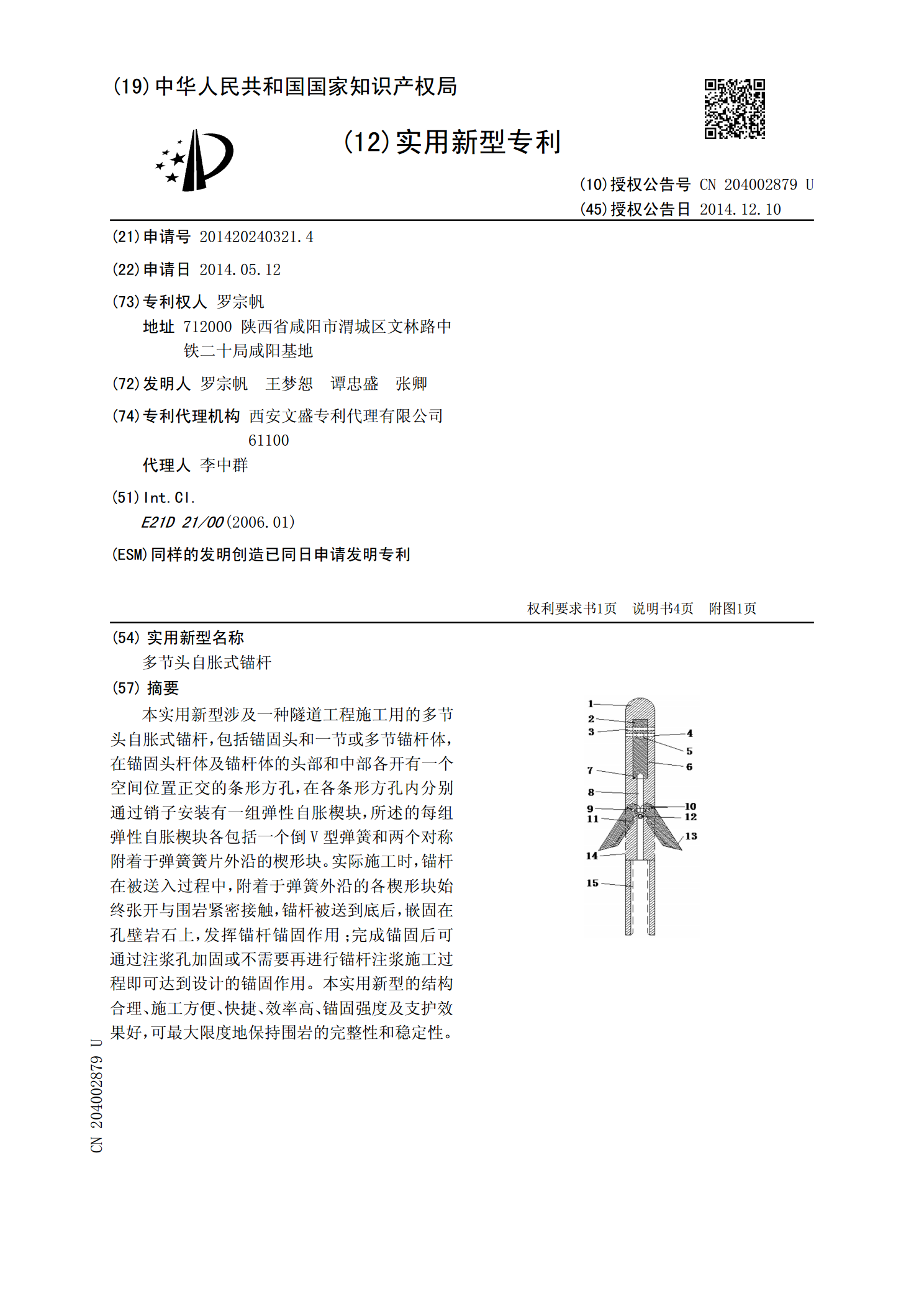
本实用新型涉及一种隧道工程施工用的多节头自胀式锚杆,包括锚固头和一节或多节锚杆体,在锚固头杆体及锚杆体的头部和中部各开有一个空间位置正交的条形方孔,在各条形方孔内分别通过销子安装有一组弹性自胀楔块,所述的每组弹性自胀楔块各包括一个倒V型弹簧和两个对称附着于弹簧簧片外沿的楔形块。实际施工时,锚杆在被送入过程中,附着于弹簧外沿的各楔形块始终张开与围岩紧密接触,锚杆被送到底后,嵌固在孔壁岩石上,发挥锚杆锚固作用;完成锚固后可通过注浆孔加固或不需要再进行锚杆注浆施工过程即可达到设计的锚固作用。本实用新型的结构合理

柔性尺蠖机器人.pdf
本发明的目的在于提供柔性尺蠖机器人,包括转动抓取机构和腰部屈伸机构;转动抓取机构包括抓取机构模块和转动机构模块;抓取机构模块包括抓取机构安装本体、抓取机构转动电机;转动机构模块包括转体电机安装架、转体电机;腰部屈伸机构包括两个绳索制动电机安装架、至少九个腰部转板、两根绳索、两个绳索缠绕轮、两个绳索制动电机;转动抓取机构有两个。本发明能完成大幅度屈伸和大角度转弯,且对管道线路的交错复杂的适应性强,能广泛应用于工业和生活用复杂管道线路的检测和维修,具有很大的实用价值。

尺蠖式机器人机构设计与运动学分析.ppt
尺蠖式机器人机构设计与运动学分析———李晓阳机器人的定义爬行机器人的分类微胃肠道疾病诊疗机器人系统的研究背景消化道内窥镜系统传统内窥镜的优缺点被动式胶囊内窥镜系统被动式胶囊内窥镜的优缺点微型尺蠖式胃肠道疾病诊疗机器人核心问题尺蠖尺蠖式爬行机器人的原理仿尺蠖式机器人仿尺蠖式机器人仿尺蠖式机器人仿尺蠖式机器人尺蠖运动特点尺蠖式肠道机器人的驱动方式形状记忆合金式驱动分析电磁驱动方式气动式驱动方式压电材料微型电机驱动方式GHM1770010033E直流齿轮组微型电机仿尺蠖式运动机构设计结肠微型机器人应具备以下特性

一种尺蠖式爬行机器人的研究的综述报告.docx
一种尺蠖式爬行机器人的研究的综述报告尺蠖是一种足类动物,可以进行快速移动和高效的跨越障碍物。由于其独特的运动能力,尺蠖已经成为机器人领域的一个热门研究方向,尺蠖式爬行机器人被广泛用于军事、医疗和民用等领域。尺蠖的运动方式主要包括波动运动和滚动运动。波动运动是指尺蠖通过身体的收缩来体现,即身体两端交替向前收缩,从而使身体向前移动。滚动运动是指尺蠖通过身体的卷曲运动来实现,即其中一端的身体往上卷曲,另一端的身体往下卷曲,从而使身体向前滚动。这两种运动方式使得尺蠖在不同的情况下都能完成运动任务,并具有很好的适应