
用于竖井掘进水下机器人的抱爪式紧固装置.pdf

一只****呀盟


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于竖井掘进水下机器人的抱爪式紧固装置.pdf
本发明公开了一种用于竖井掘进水下机器人的抱爪式紧固装置,包括底座(1)、水下机器人(2)、伸缩转动组件、抱爪(3)、预埋板(4)和定位板(5);预埋板固定安装在沉井结构底部的十字梁(6)的顶部中心,若干块定位板分别间隔设置在十字梁的底部;底座安装在水下机器人的底部,若干个抱爪分别通过伸缩转动组件可转动开合式安装在底座上;水下机器人下沉至十字梁上时能通过底座置于预埋板上,若干个抱爪能分别转动压紧在若干块定位板上,使水下机器人与十字梁对中设置。本发明能解决现有技术中水下机器人在水下安装时无法精准定位和紧固的问
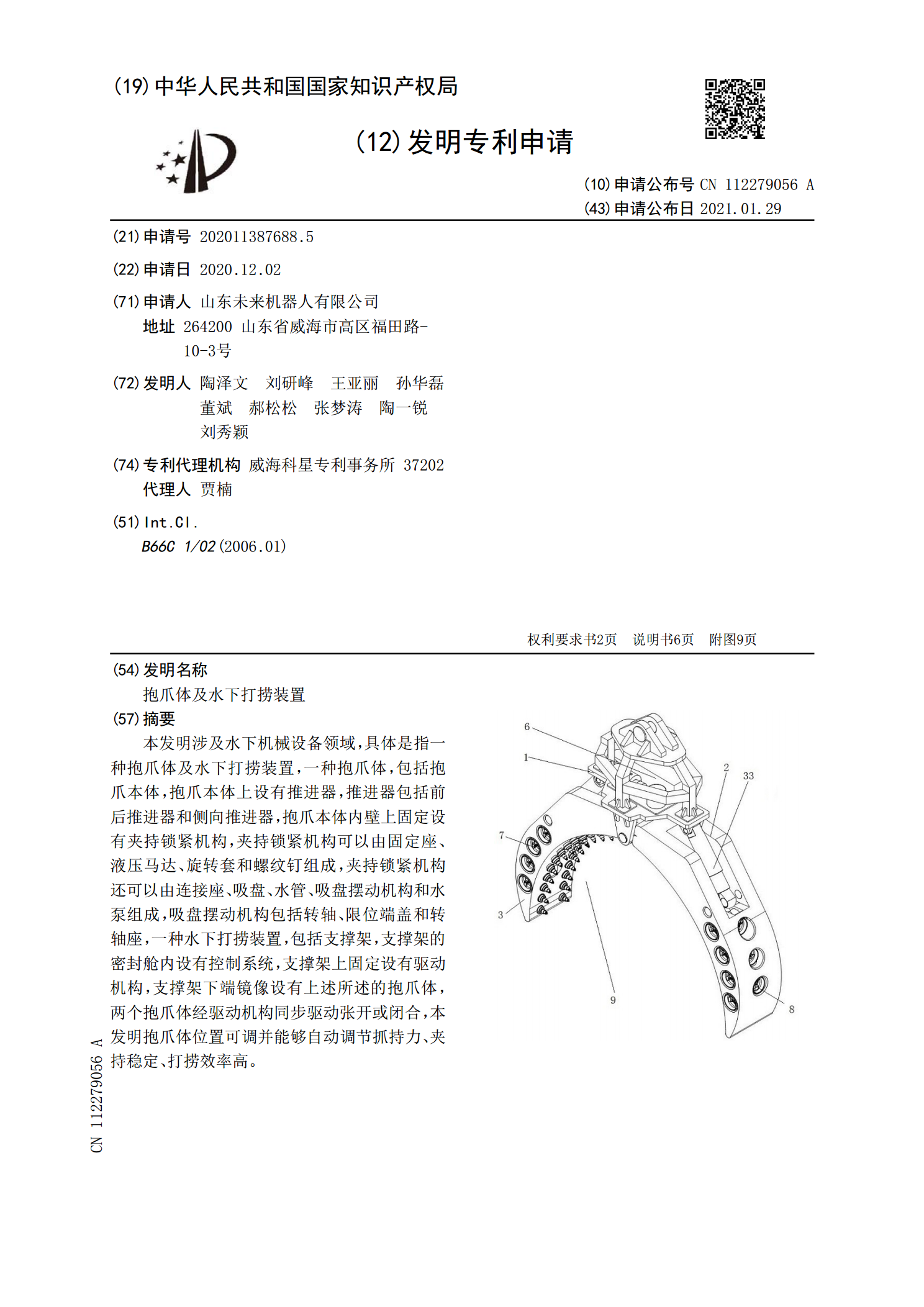
抱爪体及水下打捞装置.pdf
本发明涉及水下机械设备领域,具体是指一种抱爪体及水下打捞装置,一种抱爪体,包括抱爪本体,抱爪本体上设有推进器,推进器包括前后推进器和侧向推进器,抱爪本体内壁上固定设有夹持锁紧机构,夹持锁紧机构可以由固定座、液压马达、旋转套和螺纹钉组成,夹持锁紧机构还可以由连接座、吸盘、水管、吸盘摆动机构和水泵组成,吸盘摆动机构包括转轴、限位端盖和转轴座,一种水下打捞装置,包括支撑架,支撑架的密封舱内设有控制系统,支撑架上固定设有驱动机构,支撑架下端镜像设有上述所述的抱爪体,两个抱爪体经驱动机构同步驱动张开或闭合,本发明抱

夹爪式管道连接紧固装置.pdf
本发明公开了一种夹爪式管道连接紧固装置,包括接头和压紧件,接头包括环形底座和分布于环形底座上的数个夹爪;分布于环形底座上的数个夹爪排列形成圆台状;夹爪的纵向截面为直角梯形,夹爪的外侧面为带有外螺纹的倾斜面,相邻两个夹爪之间留有间隙;压紧件为一管件,该管件的外壁为柱面A,内壁包含有与夹爪外侧面的外螺纹相适应的内螺纹的锥面;锥面的斜度大于所述倾斜面斜度。本发明的夹爪式管道连接紧固装置,通用性强,结构简单,易生产,在使用过程中不易松动。
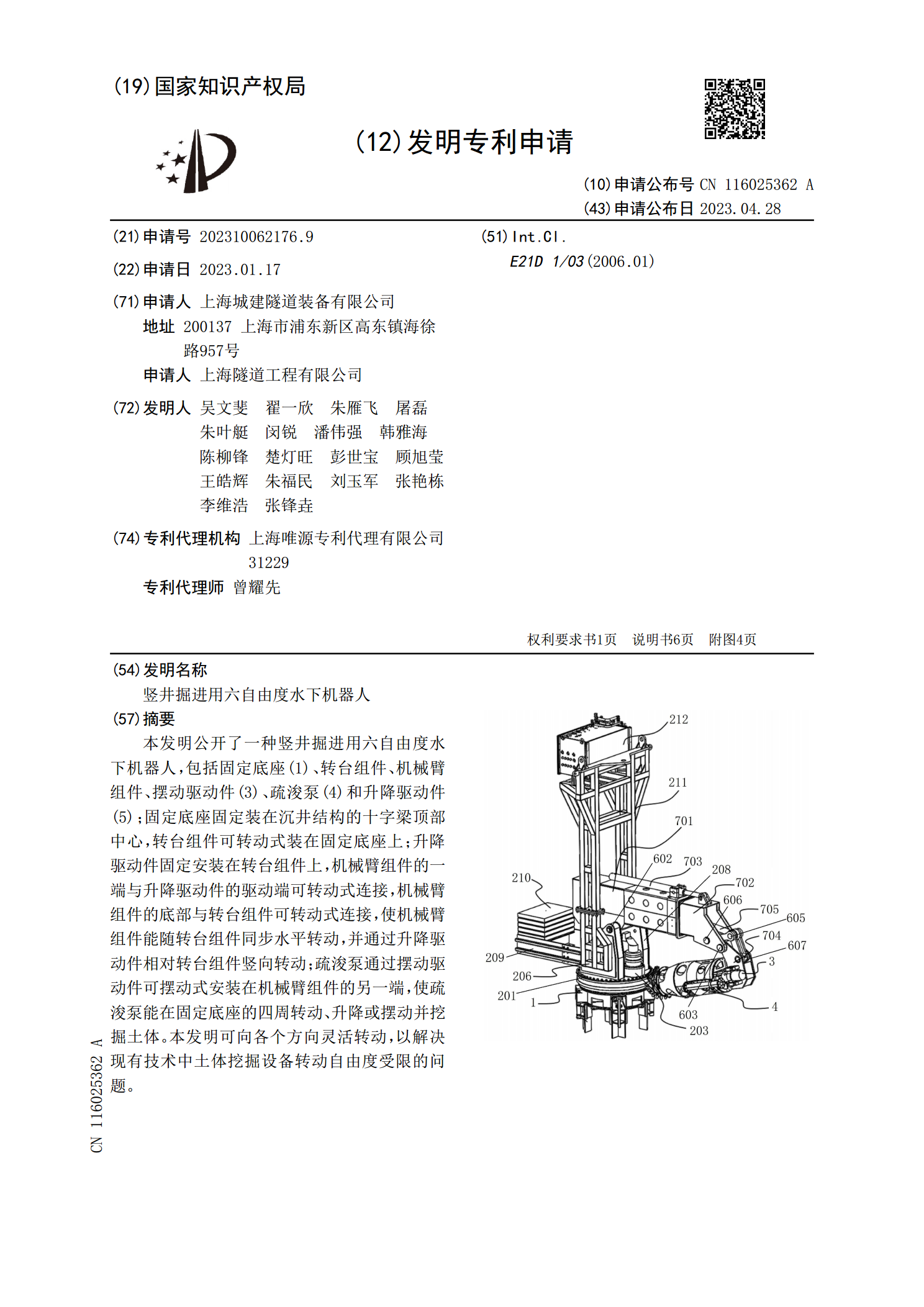
竖井掘进用六自由度水下机器人.pdf
本发明公开了一种竖井掘进用六自由度水下机器人,包括固定底座(1)、转台组件、机械臂组件、摆动驱动件(3)、疏浚泵(4)和升降驱动件(5);固定底座固定装在沉井结构的十字梁顶部中心,转台组件可转动式装在固定底座上;升降驱动件固定安装在转台组件上,机械臂组件的一端与升降驱动件的驱动端可转动式连接,机械臂组件的底部与转台组件可转动式连接,使机械臂组件能随转台组件同步水平转动,并通过升降驱动件相对转台组件竖向转动;疏浚泵通过摆动驱动件可摆动式安装在机械臂组件的另一端,使疏浚泵能在固定底座的四周转动、升降或摆动并挖

一种爪抱式尺蠖机器人.pdf
本申请公开了爪抱式尺蠖机器人。本技术方案中,爪抱式尺蠖机器人包括动力躯干和二抓持器两大部分组成,动力躯干包括身臂机构和云台机构,抓持器包括凸轮机构、爪抱机构、齿轮传动机构、定位机构以及将上述机构联接的身架机构,工作可靠简单,仿生程度高,适用于管道攀爬和地面爬行两种情景。