
一种摇臂式机动平台自主越台阶障碍方法.pdf

星菱****23

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种摇臂式机动平台自主越台阶障碍方法.pdf
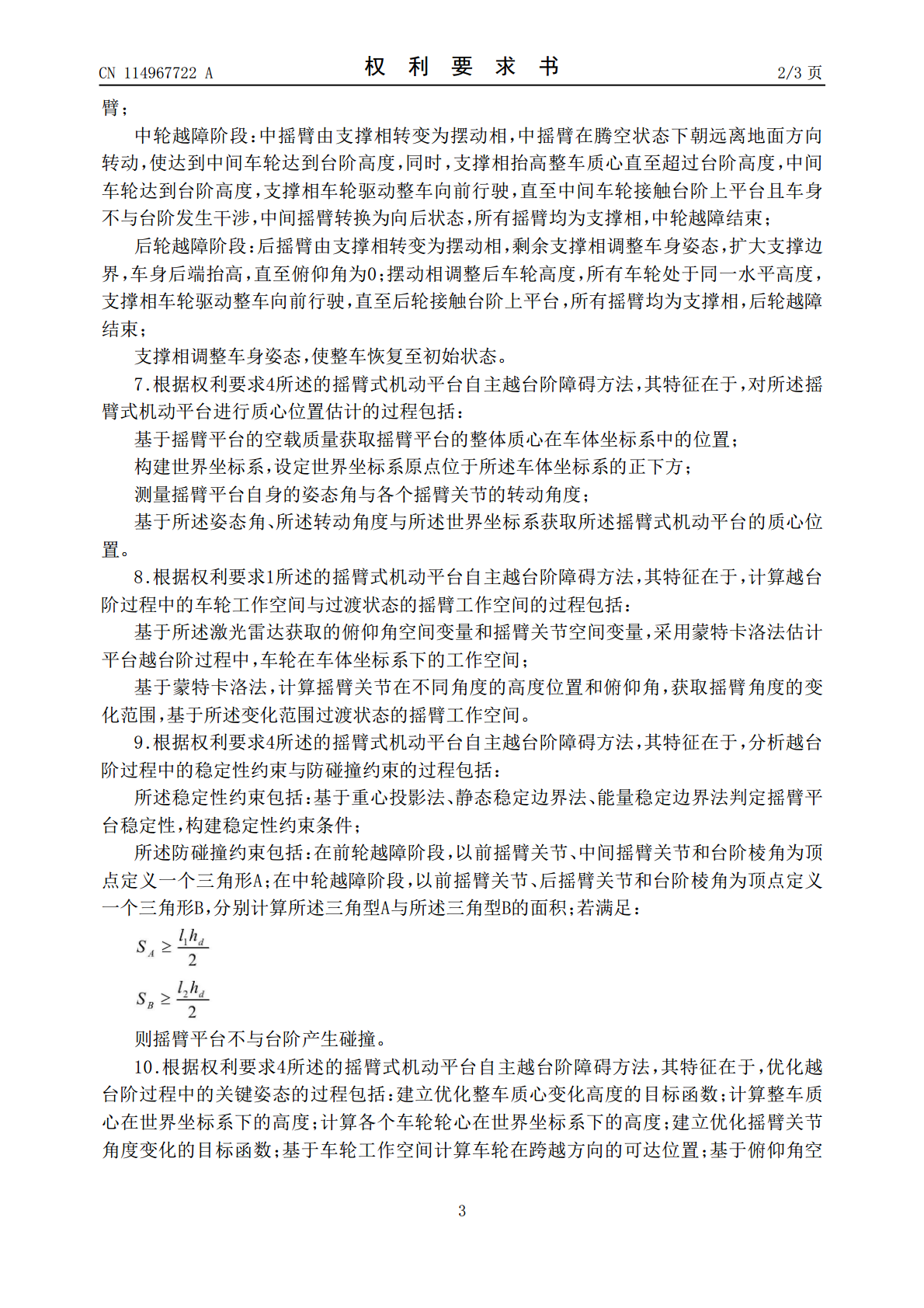
本发明公开了一种摇臂式机动平台自主越台阶障碍方法,包括:构建用于跨越台阶障碍的摇臂式机动平台;对摇臂式机动平台设置激光雷达;采集障碍物的轮廓、高度、坡度、位置信息、俯仰角空间变量和摇臂关节空间变量;设计摇臂式机动平台的越障运动步态;对摇臂式机动平台进行跨越障碍的状态分析,获取状态分析结果;基于越障运动步态与状态分析结果进行障碍跨越。本发明推导提出了自主越障动作序列中关键姿态的概念,并以此为基础,设计了一种遵循最小运动代价准则的姿态规划方法,可以实现障碍物感知定位和分类、有序规划越障姿态、自适应调整越障动作
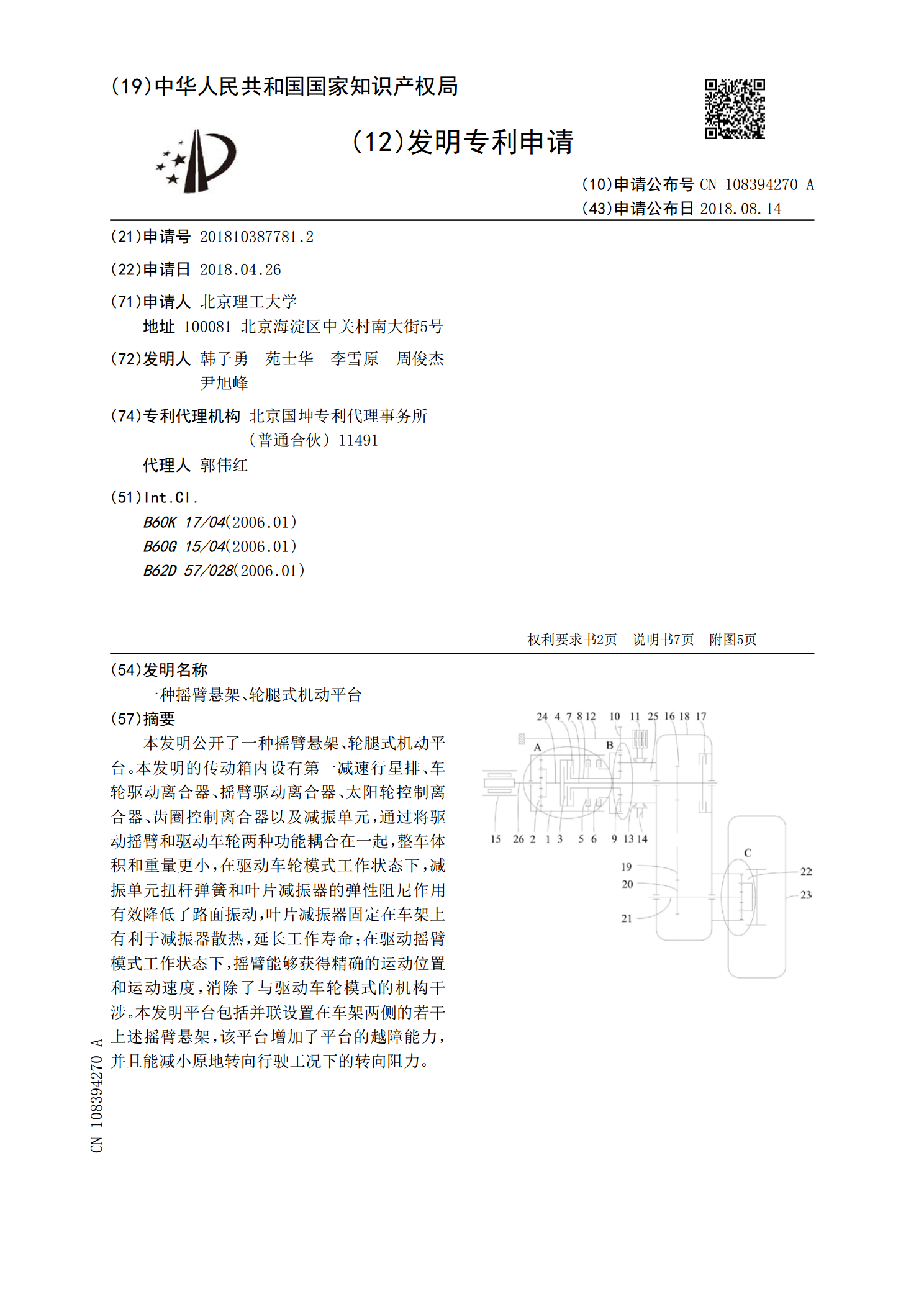
一种摇臂悬架、轮腿式机动平台.pdf
本发明公开了一种摇臂悬架、轮腿式机动平台。本发明的传动箱内设有第一减速行星排、车轮驱动离合器、摇臂驱动离合器、太阳轮控制离合器、齿圈控制离合器以及减振单元,通过将驱动摇臂和驱动车轮两种功能耦合在一起,整车体积和重量更小,在驱动车轮模式工作状态下,减振单元扭杆弹簧和叶片减振器的弹性阻尼作用有效降低了路面振动,叶片减振器固定在车架上有利于减振器散热,延长工作寿命;在驱动摇臂模式工作状态下,摇臂能够获得精确的运动位置和运动速度,消除了与驱动车轮模式的机构干涉。本发明平台包括并联设置在车架两侧的若干上述摇臂悬架,
一种摇臂悬架、轮腿式机动平台以及无人控制系统.pdf
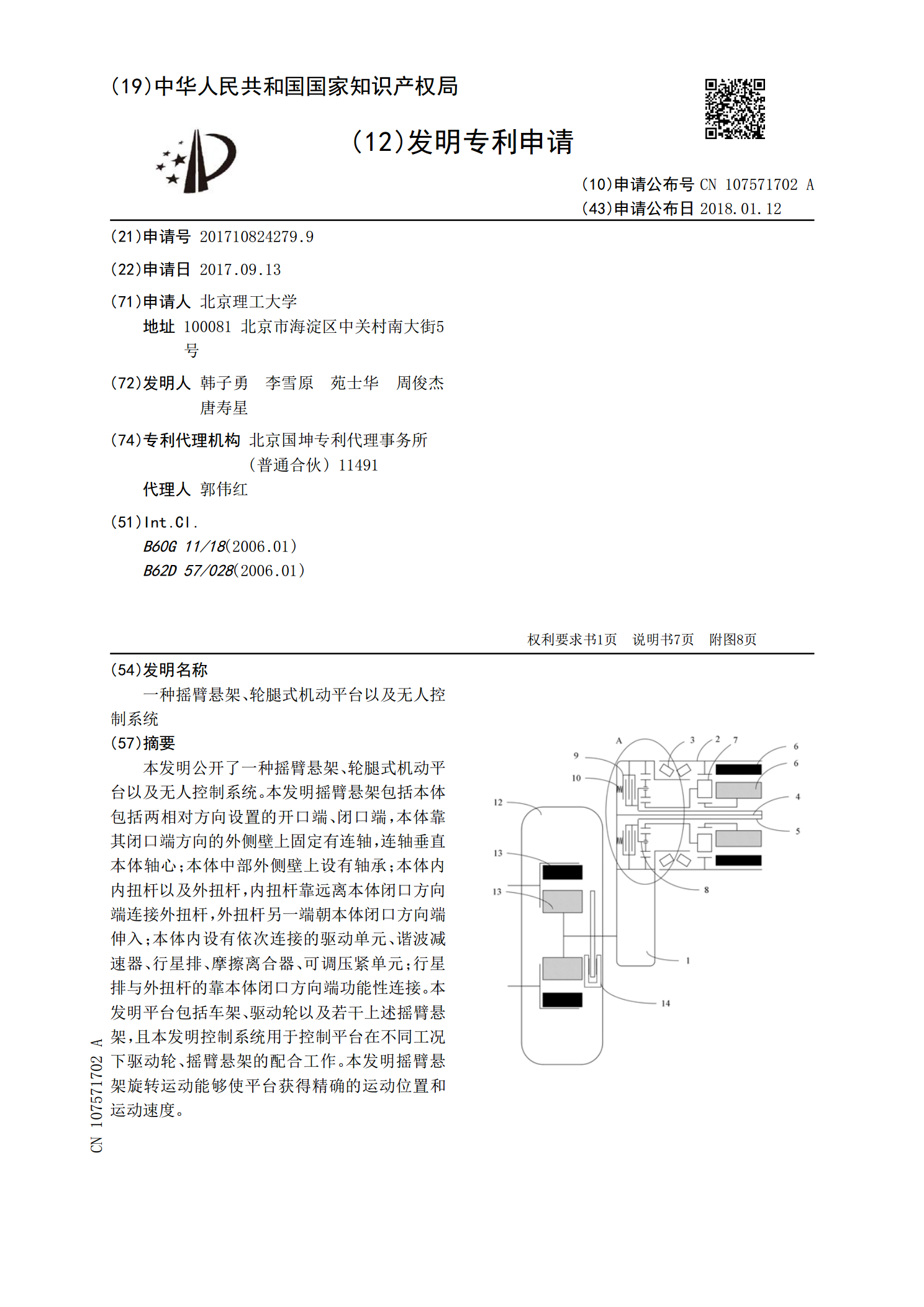
本发明公开了一种摇臂悬架、轮腿式机动平台以及无人控制系统。本发明摇臂悬架包括本体包括两相对方向设置的开口端、闭口端,本体靠其闭口端方向的外侧壁上固定有连轴,连轴垂直本体轴心;本体中部外侧壁上设有轴承;本体内内扭杆以及外扭杆,内扭杆靠远离本体闭口方向端连接外扭杆,外扭杆另一端朝本体闭口方向端伸入;本体内设有依次连接的驱动单元、谐波减速器、行星排、摩擦离合器、可调压紧单元;行星排与外扭杆的靠本体闭口方向端功能性连接。本发明平台包括车架、驱动轮以及若干上述摇臂悬架,且本发明控制系统用于控制平台在不同工况下驱动轮
一种便携式无人机动平台自主起降引导系统及方法.pdf
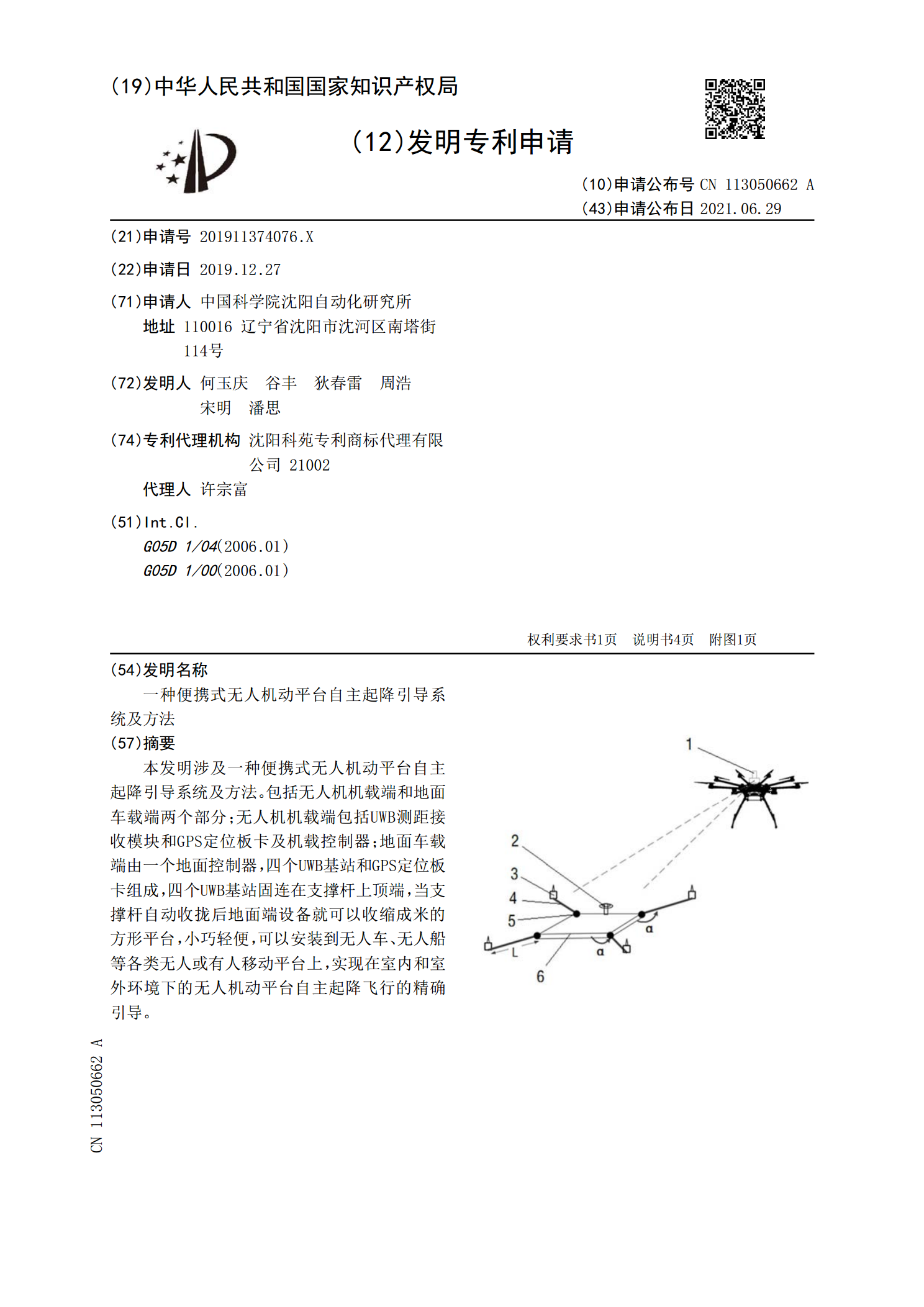
本发明涉及一种便携式无人机动平台自主起降引导系统及方法。包括无人机机载端和地面车载端两个部分;无人机机载端包括UWB测距接收模块和GPS定位板卡及机载控制器;地面车载端由一个地面控制器,四个UWB基站和GPS定位板卡组成,四个UWB基站固连在支撑杆上顶端,当支撑杆自动收拢后地面端设备就可以收缩成米的方形平台,小巧轻便,可以安装到无人车、无人船等各类无人或有人移动平台上,实现在室内和室外环境下的无人机动平台自主起降飞行的精确引导。
高速无人机动平台摇臂悬架系统.pdf
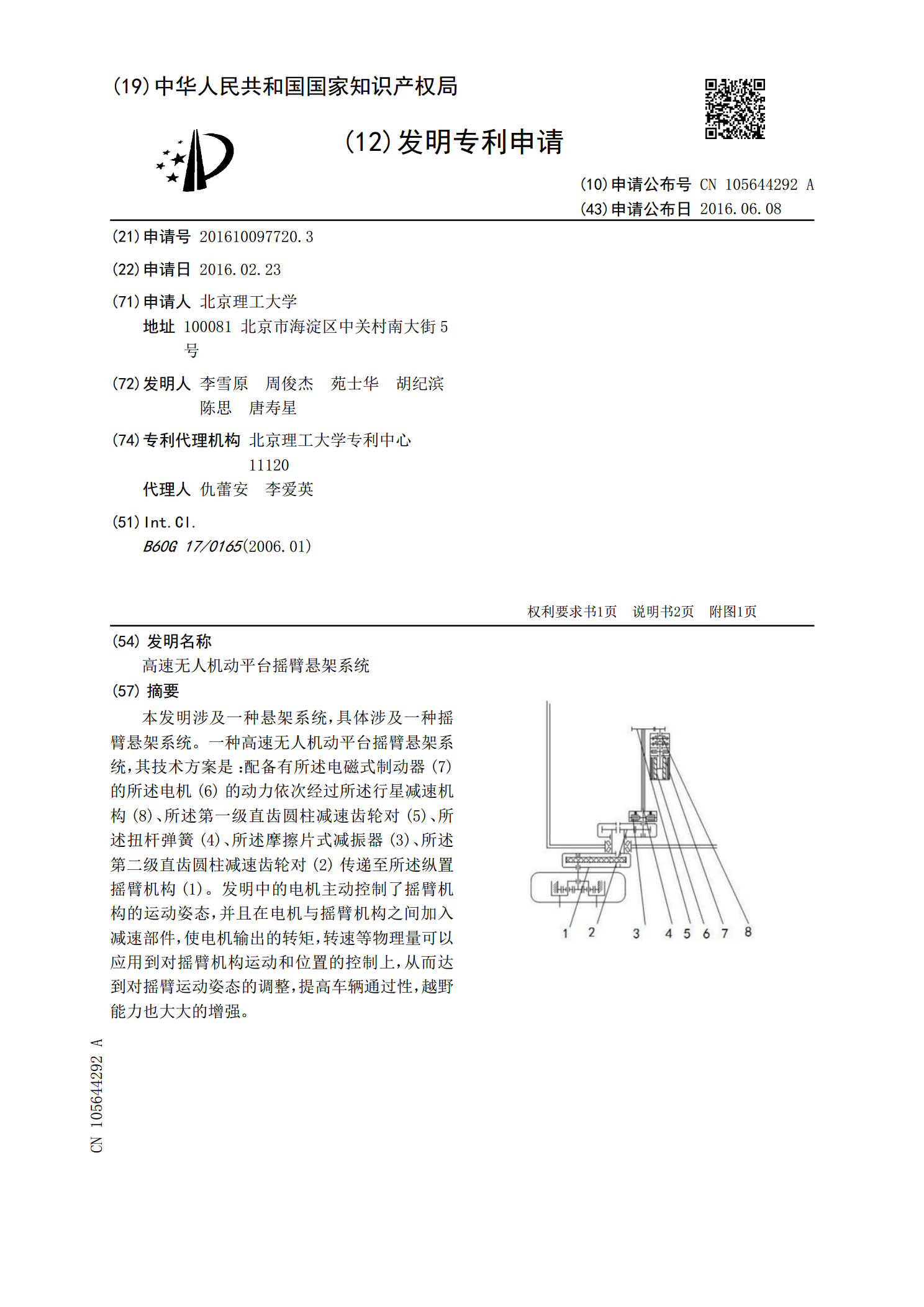
本发明涉及一种悬架系统,具体涉及一种摇臂悬架系统。一种高速无人机动平台摇臂悬架系统,其技术方案是:配备有所述电磁式制动器(7)的所述电机(6)的动力依次经过所述行星减速机构(8)、所述第一级直齿圆柱减速齿轮对(5)、所述扭杆弹簧(4)、所述摩擦片式减振器(3)、所述第二级直齿圆柱减速齿轮对(2)传递至所述纵置摇臂机构(1)。发明中的电机主动控制了摇臂机构的运动姿态,并且在电机与摇臂机构之间加入减速部件,使电机输出的转矩,转速等物理量可以应用到对摇臂机构运动和位置的控制上,从而达到对摇臂运动姿态的调整,提高