
一种便携式无人机动平台自主起降引导系统及方法.pdf

葫芦****io

1/7

2/7
3/7
4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种便携式无人机动平台自主起降引导系统及方法.pdf
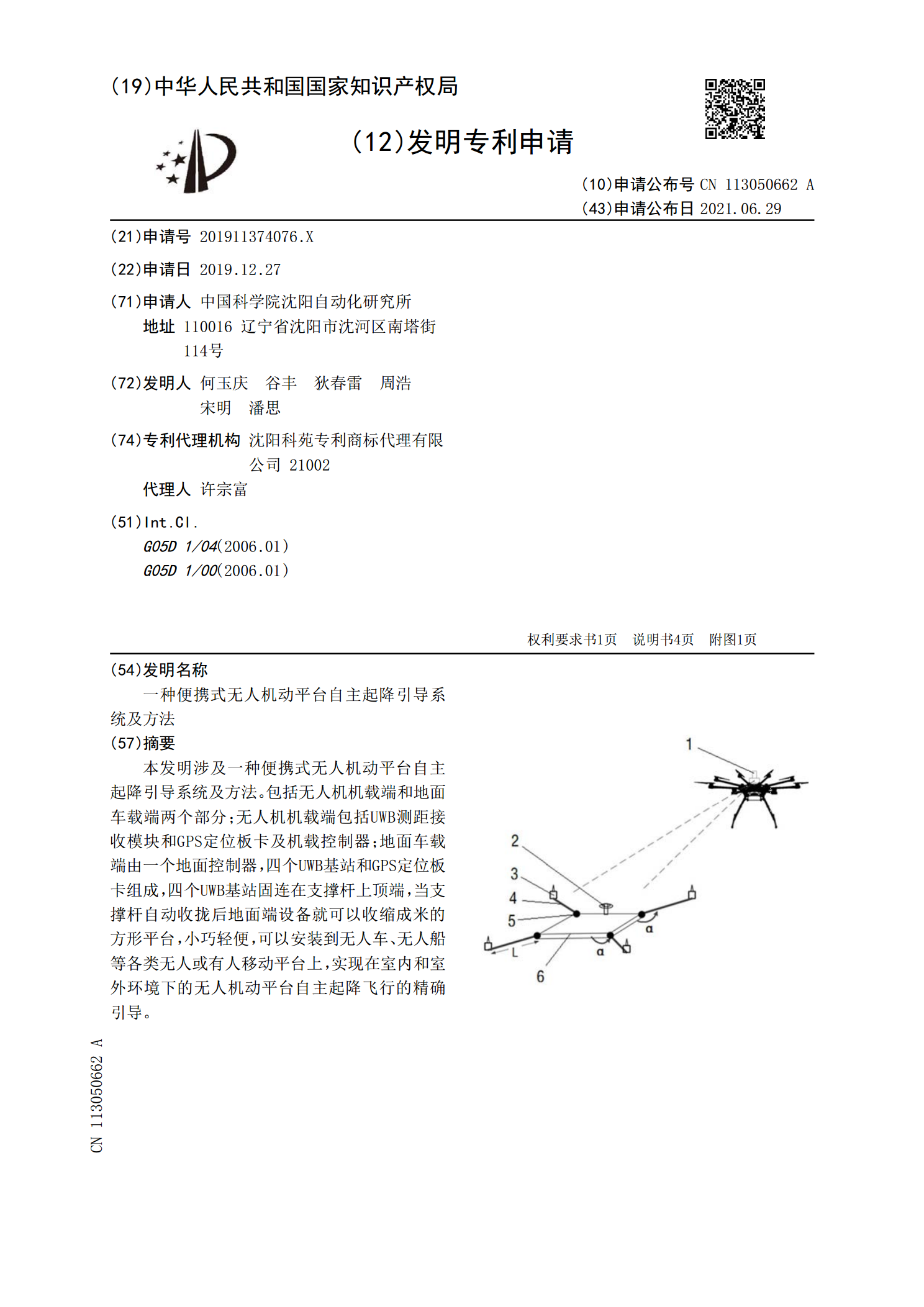
本发明涉及一种便携式无人机动平台自主起降引导系统及方法。包括无人机机载端和地面车载端两个部分;无人机机载端包括UWB测距接收模块和GPS定位板卡及机载控制器;地面车载端由一个地面控制器,四个UWB基站和GPS定位板卡组成,四个UWB基站固连在支撑杆上顶端,当支撑杆自动收拢后地面端设备就可以收缩成米的方形平台,小巧轻便,可以安装到无人车、无人船等各类无人或有人移动平台上,实现在室内和室外环境下的无人机动平台自主起降飞行的精确引导。
一种便携式无人机起降平台.pdf
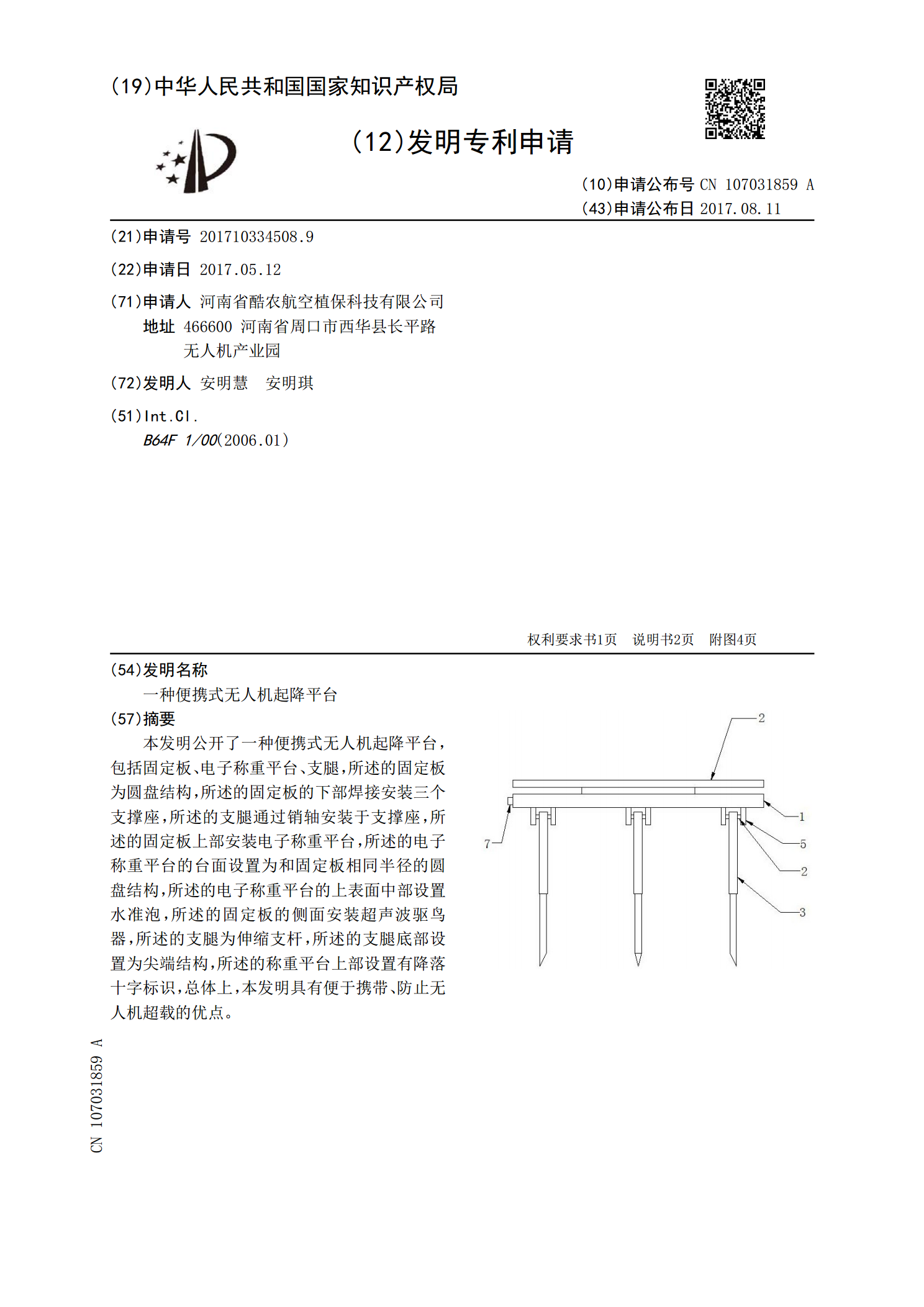
本发明公开了一种便携式无人机起降平台,包括固定板、电子称重平台、支腿,所述的固定板为圆盘结构,所述的固定板的下部焊接安装三个支撑座,所述的支腿通过销轴安装于支撑座,所述的固定板上部安装电子称重平台,所述的电子称重平台的台面设置为和固定板相同半径的圆盘结构,所述的电子称重平台的上表面中部设置水准泡,所述的固定板的侧面安装超声波驱鸟器,所述的支腿为伸缩支杆,所述的支腿底部设置为尖端结构,所述的称重平台上部设置有降落十字标识,总体上,本发明具有便于携带、防止无人机超载的优点。
一种垂直起降无人机移动平台降落引导装置及其引导方法.pdf
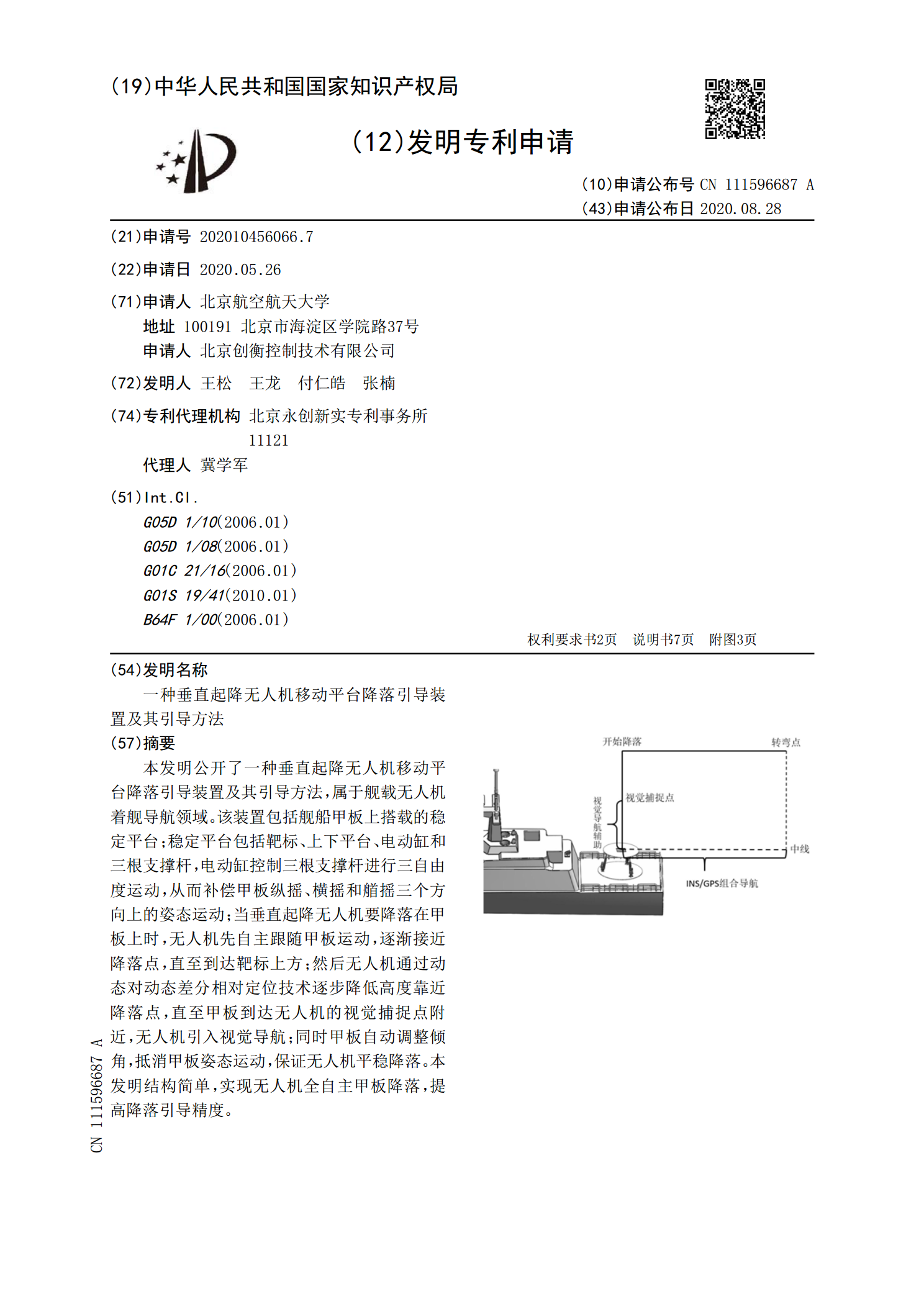
本发明公开了一种垂直起降无人机移动平台降落引导装置及其引导方法,属于舰载无人机着舰导航领域。该装置包括舰船甲板上搭载的稳定平台;稳定平台包括靶标、上下平台、电动缸和三根支撑杆,电动缸控制三根支撑杆进行三自由度运动,从而补偿甲板纵摇、横摇和艏摇三个方向上的姿态运动;当垂直起降无人机要降落在甲板上时,无人机先自主跟随甲板运动,逐渐接近降落点,直至到达靶标上方;然后无人机通过动态对动态差分相对定位技术逐步降低高度靠近降落点,直至甲板到达无人机的视觉捕捉点附近,无人机引入视觉导航;同时甲板自动调整倾角,抵消甲板姿

一种无人机动态起降装置及起降方法.pdf
本发明提供了一种无人机动态起降装置及起降方法,安装在载体基座上,包括姿态调整机构、以及设置在姿态调整机构上的停机坪,姿态调整机构设置在载体基座上,用于动态调整停机坪的位姿状态,停机坪内设有用于存放无人机的停机位;姿态调整机构和停机坪均连接有控制器,控制器用于实时动态调整姿态调整机构的位姿,以使停机坪始终保持水平状态。本发明所述的一种无人机动态起降装置及起降方法通过设置姿态调整机构,将停机坪放置于姿态调整机构上方,控制单元置于载体上,共同组成无人机起降装置;姿态调整机构采用U型框架设计,合理利用紧凑空间,预
一种便携式野外夜间无人机起降平台.pdf
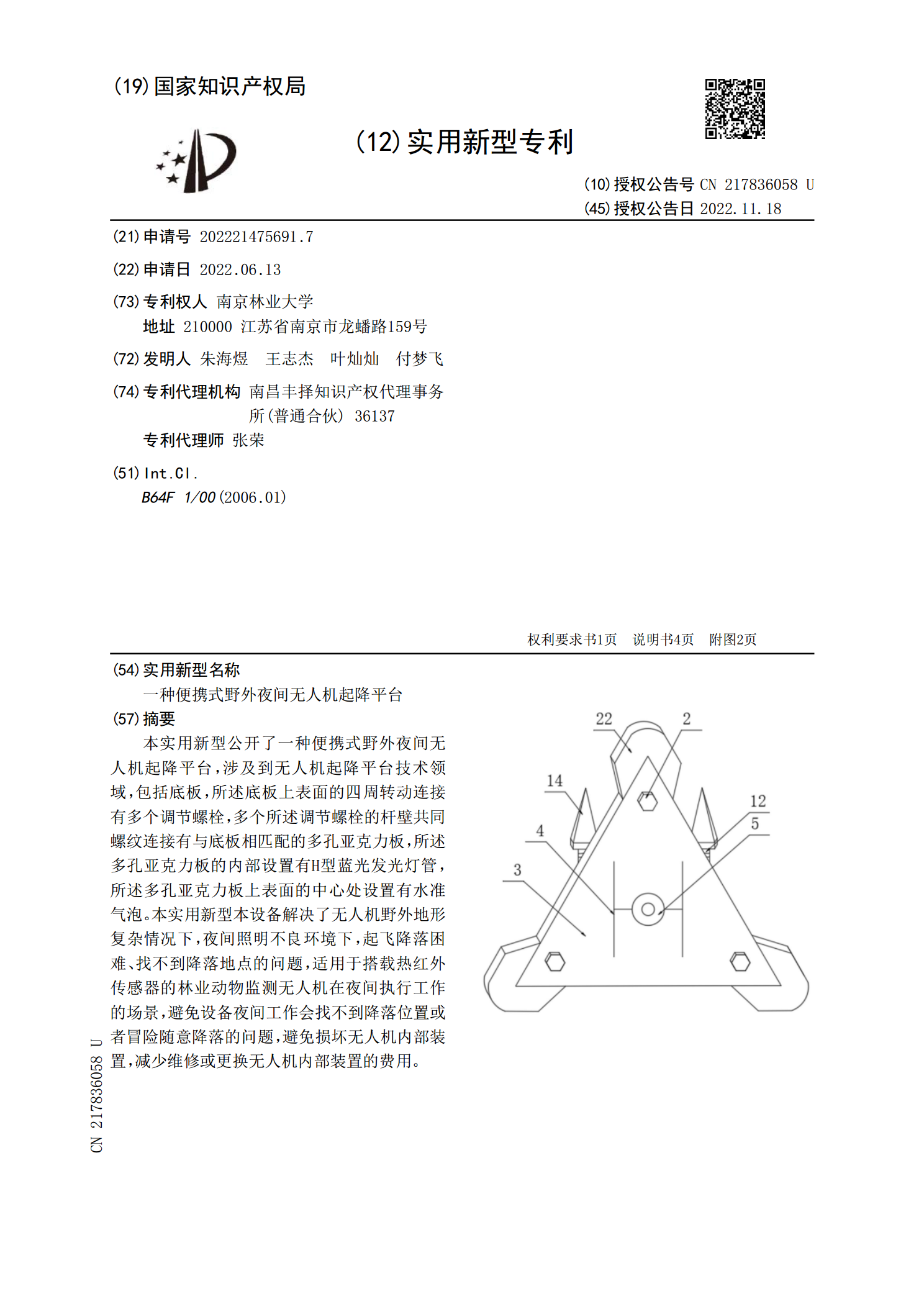
本实用新型公开了一种便携式野外夜间无人机起降平台,涉及到无人机起降平台技术领域,包括底板,所述底板上表面的四周转动连接有多个调节螺栓,多个所述调节螺栓的杆壁共同螺纹连接有与底板相匹配的多孔亚克力板,所述多孔亚克力板的内部设置有H型蓝光发光灯管,所述多孔亚克力板上表面的中心处设置有水准气泡。本实用新型本设备解决了无人机野外地形复杂情况下,夜间照明不良环境下,起飞降落困难、找不到降落地点的问题,适用于搭载热红外传感器的林业动物监测无人机在夜间执行工作的场景,避免设备夜间工作会找不到降落位置或者冒险随意降落的问