
一种机器人手腕关节.pdf

Ro****44

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

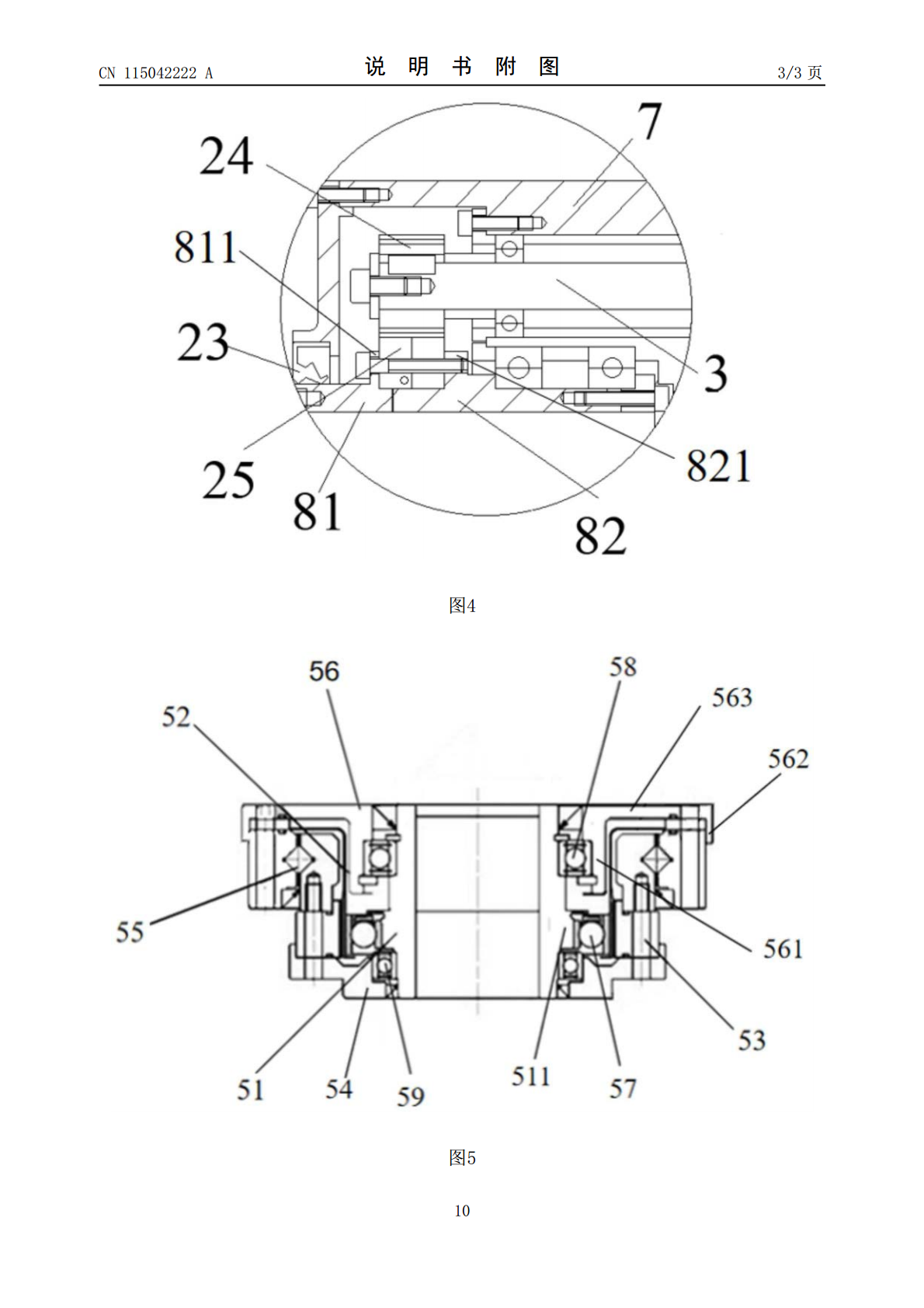
一种机器人手腕关节.pdf
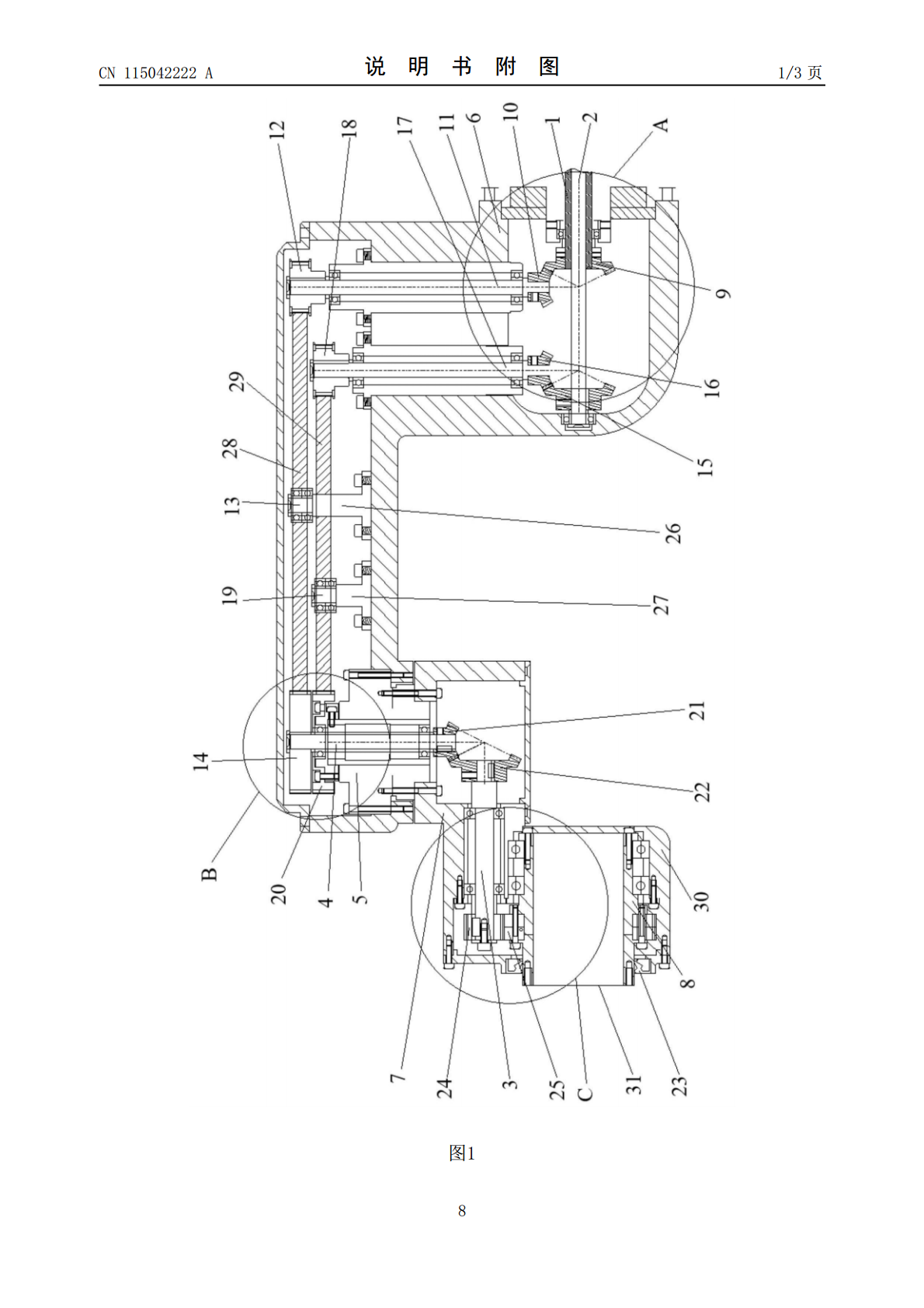
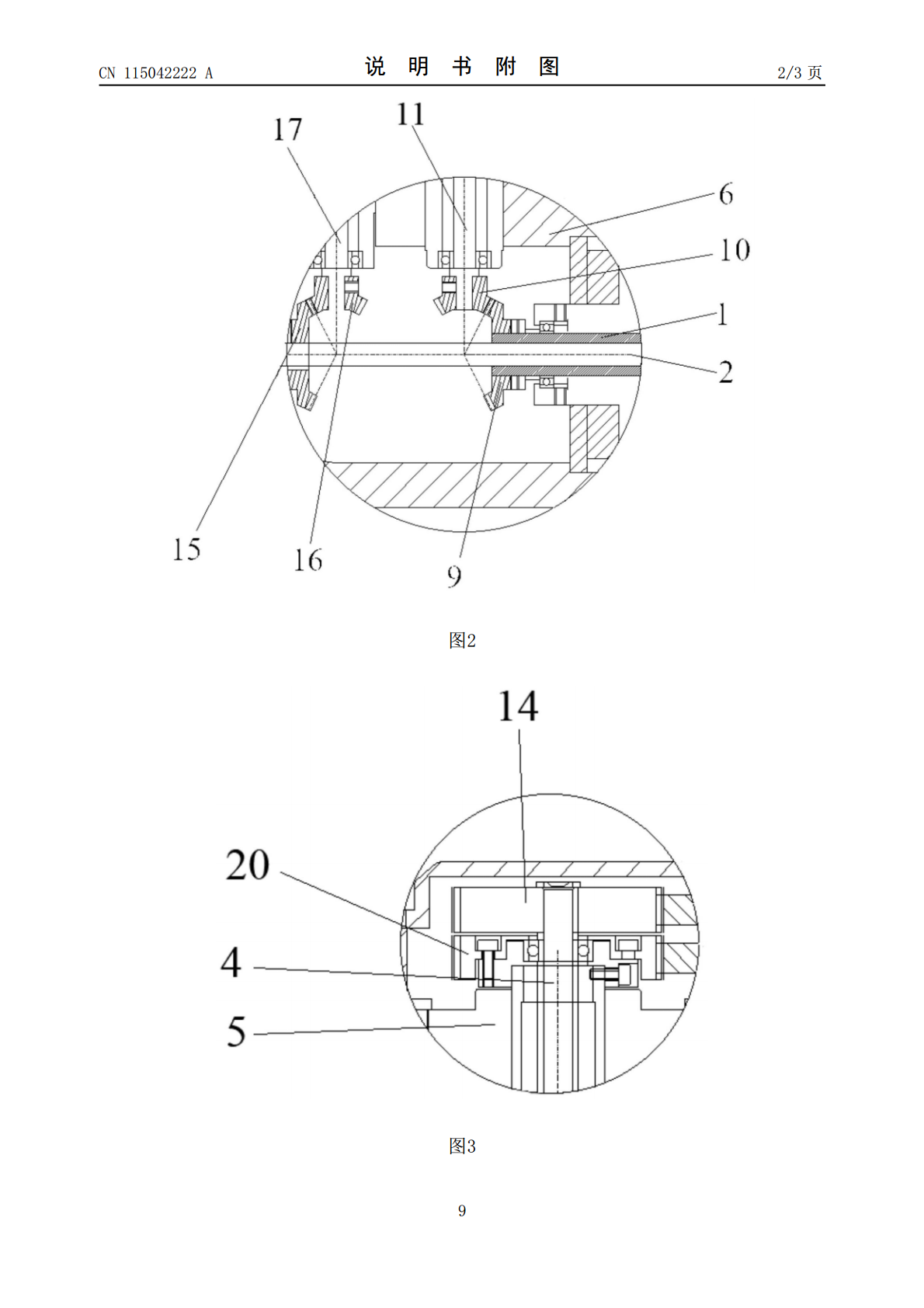
本发明公开了一种机器人手腕关节,包括第一关节动力轴,所述第一关节动力轴与第二关节动力轴分别通过锥齿轮与第一传动轴、第二转动轴连接,所述第一传动轴通过链条或皮带与第二关节从动轴连接,所述第二转动轴通过链条或皮带与第二从动轮连接,所述第二从动轮安装在减速器的输入端上,所述减速器的输出端与第二关节摆臂连接,所述第二关节从动轴通过锥齿轮与设于第二关节摆臂内部的第三关节动力轴连接,所述第二关节摆臂末端侧壁形成有圆筒形的壳体,所述壳体内设有可转动的内筒,所述第三关节动力轴转动能够将动力传输至内筒,使得内筒转动,本发明

一种仿人手腕关节的新型二自由度并联机器人.pdf
本发明涉及一种仿人手腕关节的新型二自由度并联机器人,包括:基座、过渡安装板、电机组件、齿轮、随动指向机构。其特征在于:所述两组电机组件通过螺钉安装在基座中部,所述随动指向机构通过安装在过渡安装板的四个圆孔中,同时随动指向机构通过齿轮与电机组件连接,本发明精度高、操作方便、自由灵活、成本低廉。
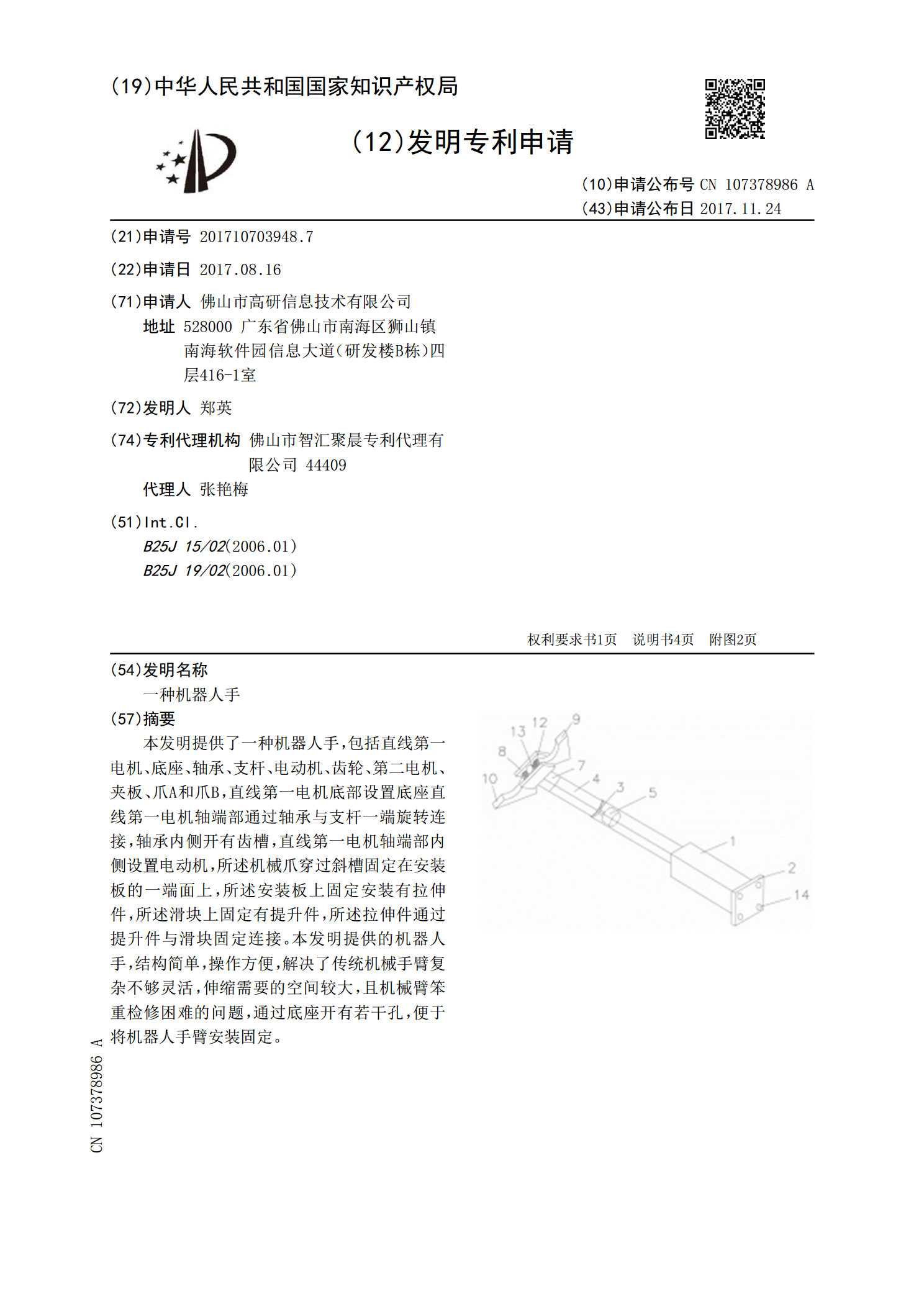
一种机器人手.pdf
本发明提供了一种机器人手,包括直线第一电机、底座、轴承、支杆、电动机、齿轮、第二电机、夹板、爪A和爪B,直线第一电机底部设置底座直线第一电机轴端部通过轴承与支杆一端旋转连接,轴承内侧开有齿槽,直线第一电机轴端部内侧设置电动机,所述机械爪穿过斜槽固定在安装板的一端面上,所述安装板上固定安装有拉伸件,所述滑块上固定有提升件,所述拉伸件通过提升件与滑块固定连接。本发明提供的机器人手,结构简单,操作方便,解决了传统机械手臂复杂不够灵活,伸缩需要的空间较大,且机械臂笨重检修困难的问题,通过底座开有若干孔,便于将机器
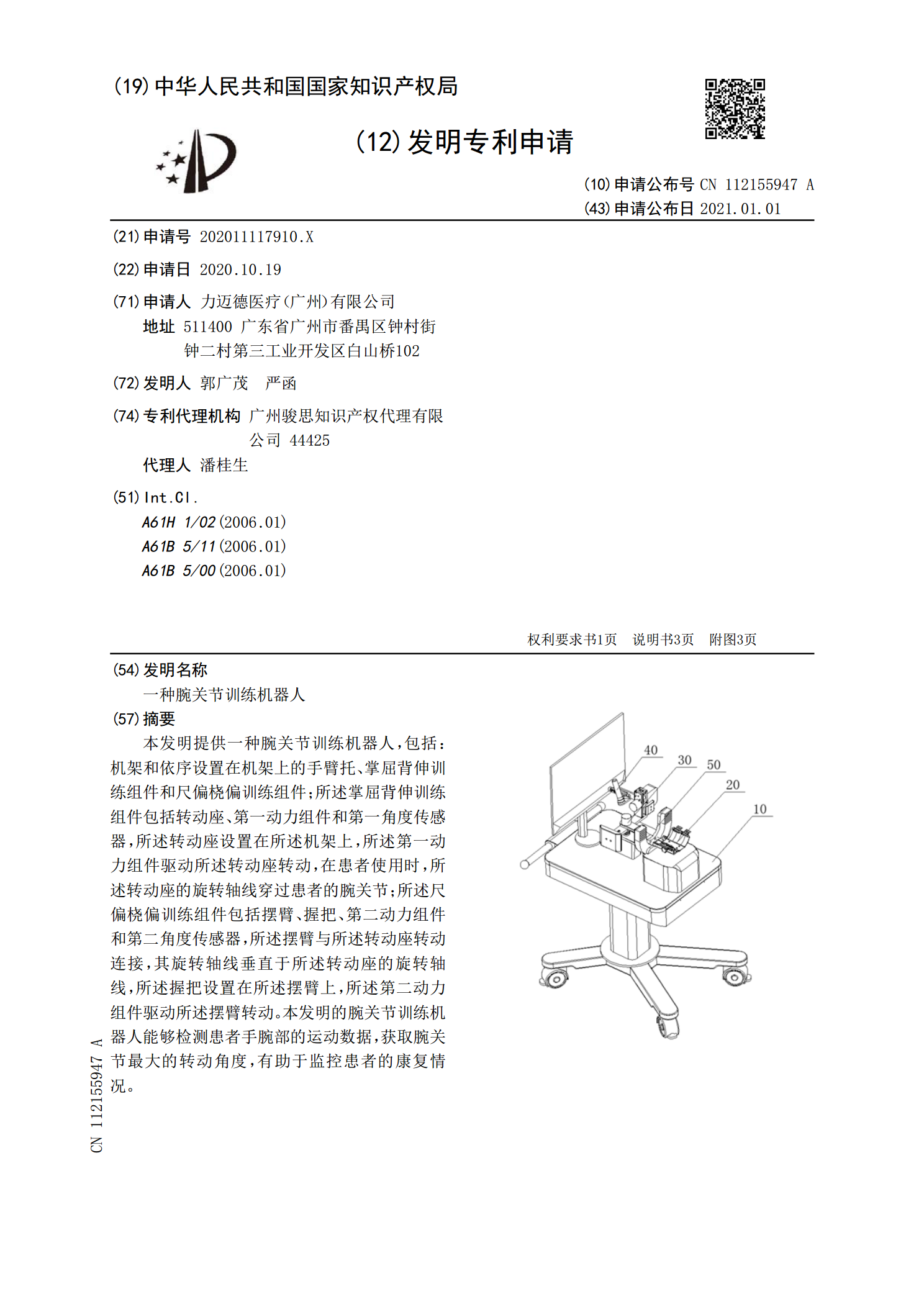
一种腕关节训练机器人.pdf
本发明提供一种腕关节训练机器人,包括:机架和依序设置在机架上的手臂托、掌屈背伸训练组件和尺偏桡偏训练组件;所述掌屈背伸训练组件包括转动座、第一动力组件和第一角度传感器,所述转动座设置在所述机架上,所述第一动力组件驱动所述转动座转动,在患者使用时,所述转动座的旋转轴线穿过患者的腕关节;所述尺偏桡偏训练组件包括摆臂、握把、第二动力组件和第二角度传感器,所述摆臂与所述转动座转动连接,其旋转轴线垂直于所述转动座的旋转轴线,所述握把设置在所述摆臂上,所述第二动力组件驱动所述摆臂转动。本发明的腕关节训练机器人能够检测
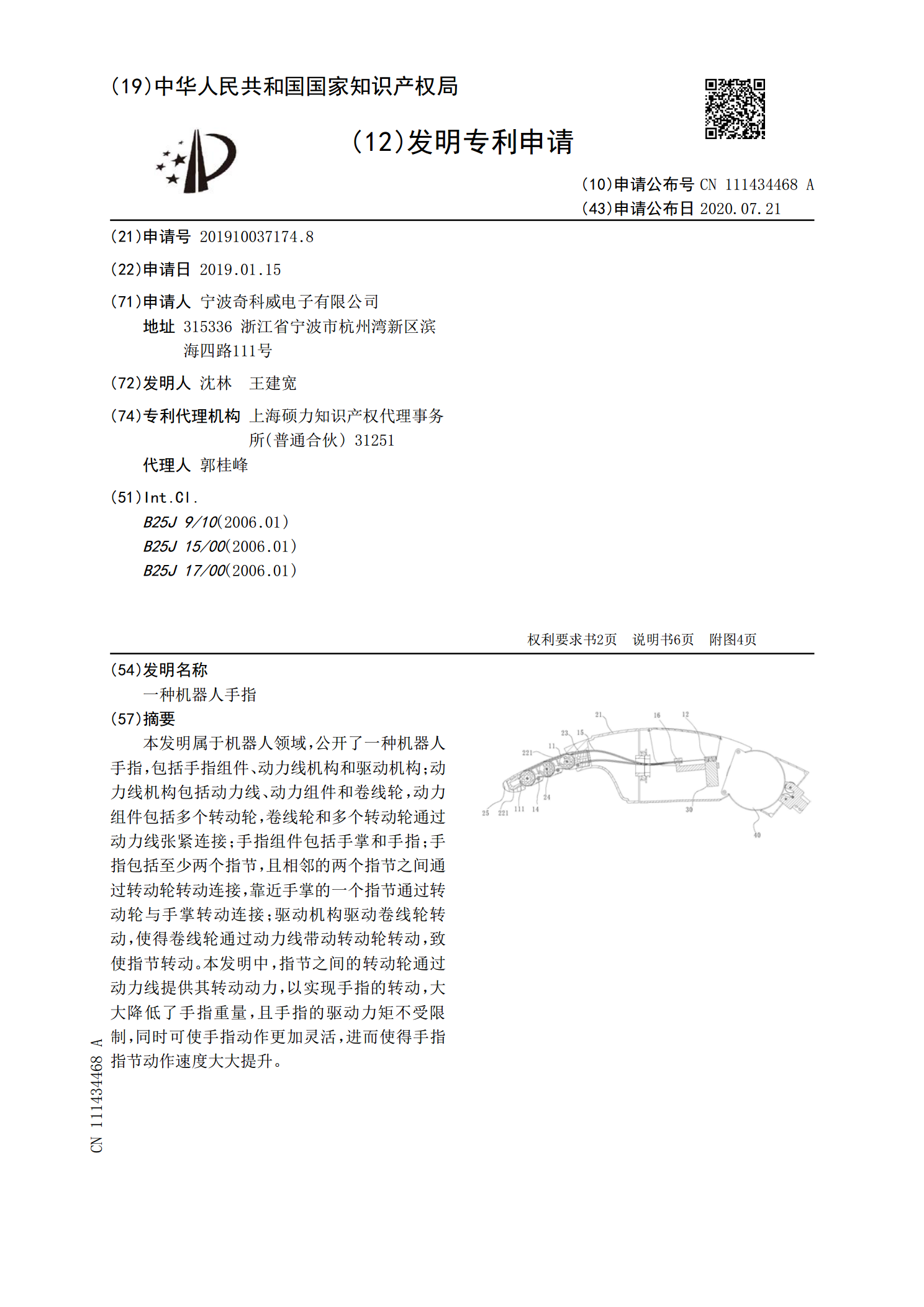
一种机器人手指.pdf
本发明属于机器人领域,公开了一种机器人手指,包括手指组件、动力线机构和驱动机构;动力线机构包括动力线、动力组件和卷线轮,动力组件包括多个转动轮,卷线轮和多个转动轮通过动力线张紧连接;手指组件包括手掌和手指;手指包括至少两个指节,且相邻的两个指节之间通过转动轮转动连接,靠近手掌的一个指节通过转动轮与手掌转动连接;驱动机构驱动卷线轮转动,使得卷线轮通过动力线带动转动轮转动,致使指节转动。本发明中,指节之间的转动轮通过动力线提供其转动动力,以实现手指的转动,大大降低了手指重量,且手指的驱动力矩不受限制,同时可使