
一种机器人手指.pdf

一吃****仕龙


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人手指.pdf
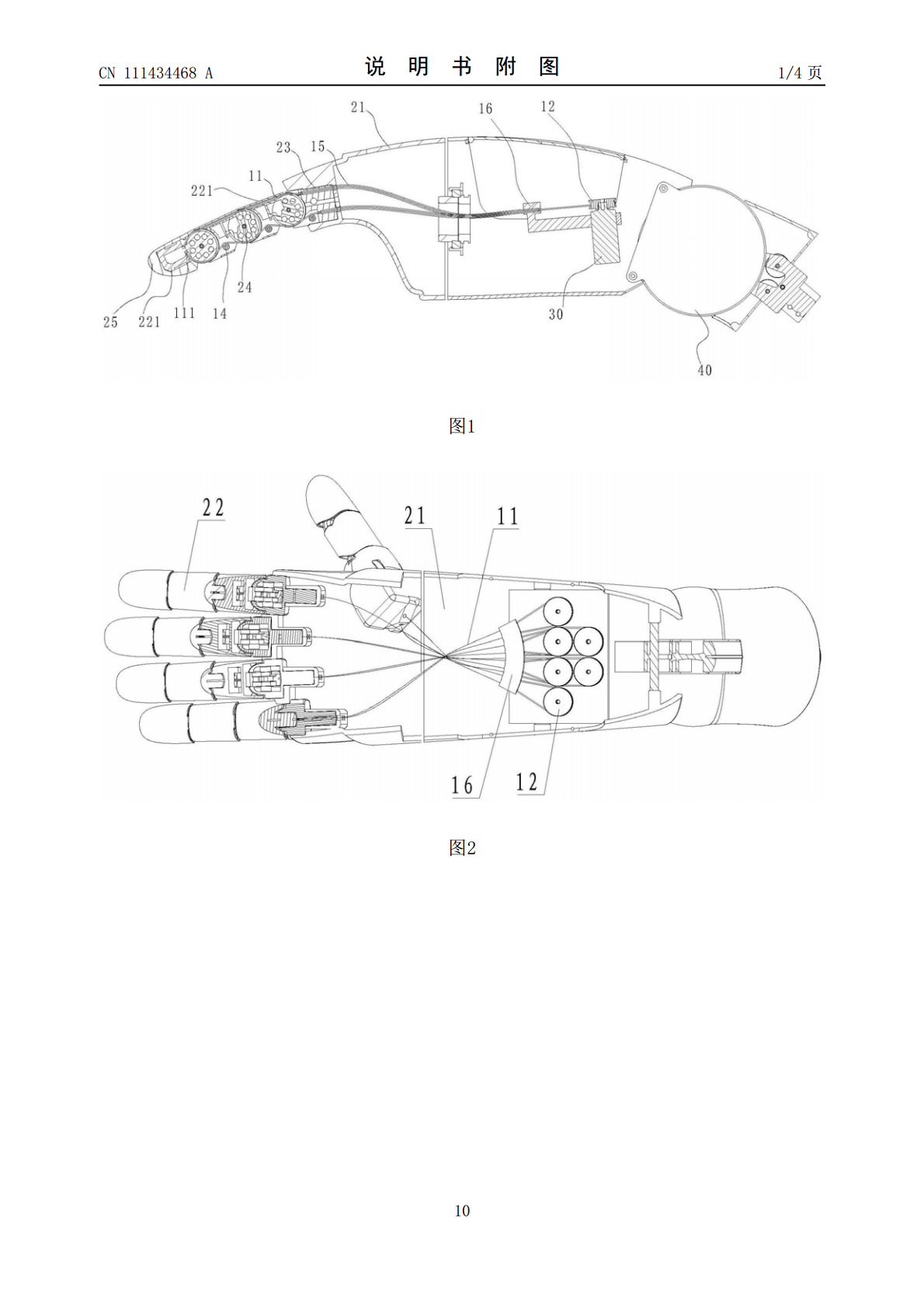
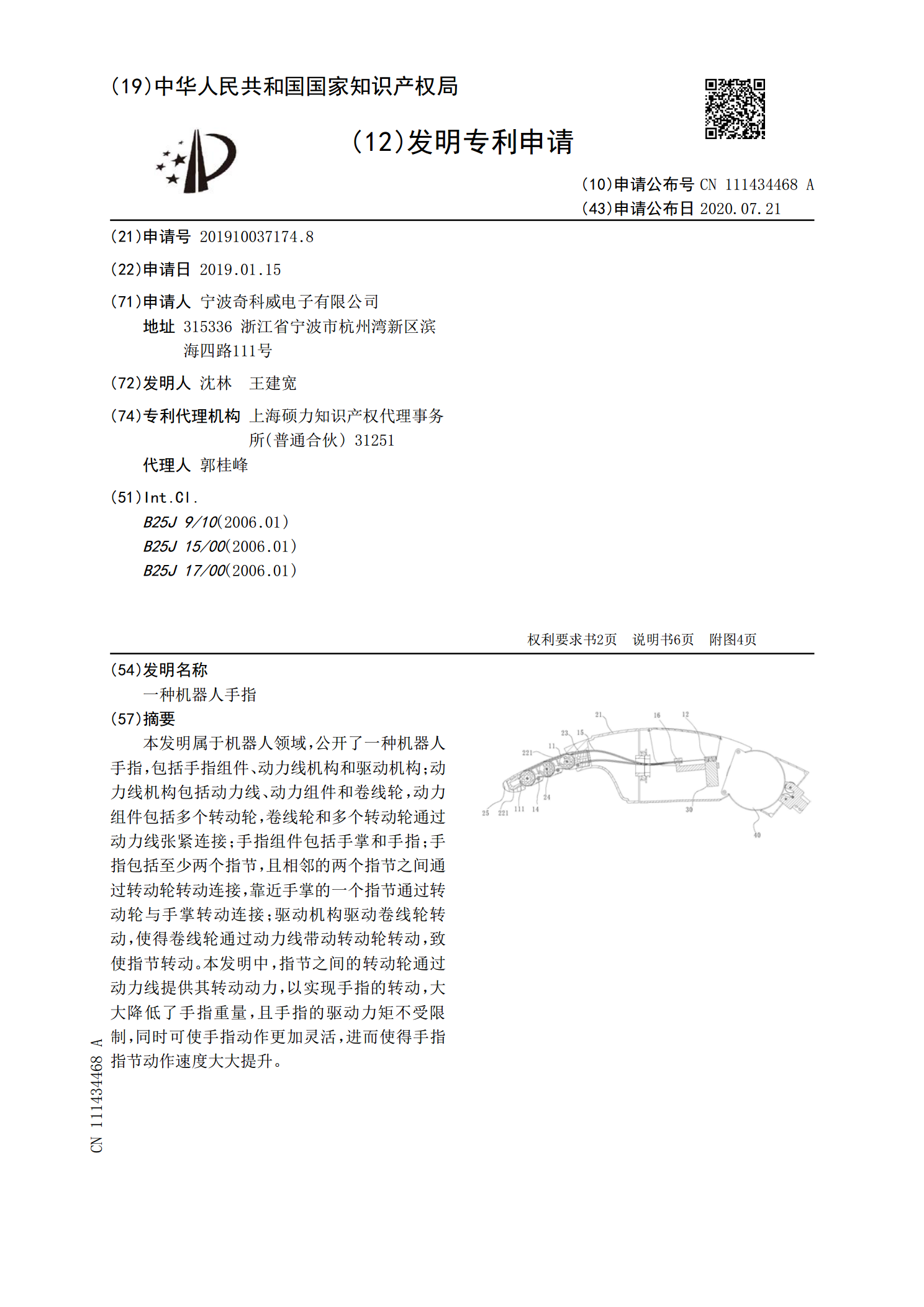
本发明属于机器人领域,公开了一种机器人手指,包括手指组件、动力线机构和驱动机构;动力线机构包括动力线、动力组件和卷线轮,动力组件包括多个转动轮,卷线轮和多个转动轮通过动力线张紧连接;手指组件包括手掌和手指;手指包括至少两个指节,且相邻的两个指节之间通过转动轮转动连接,靠近手掌的一个指节通过转动轮与手掌转动连接;驱动机构驱动卷线轮转动,使得卷线轮通过动力线带动转动轮转动,致使指节转动。本发明中,指节之间的转动轮通过动力线提供其转动动力,以实现手指的转动,大大降低了手指重量,且手指的驱动力矩不受限制,同时可使
一种仿生机器人手指.pdf
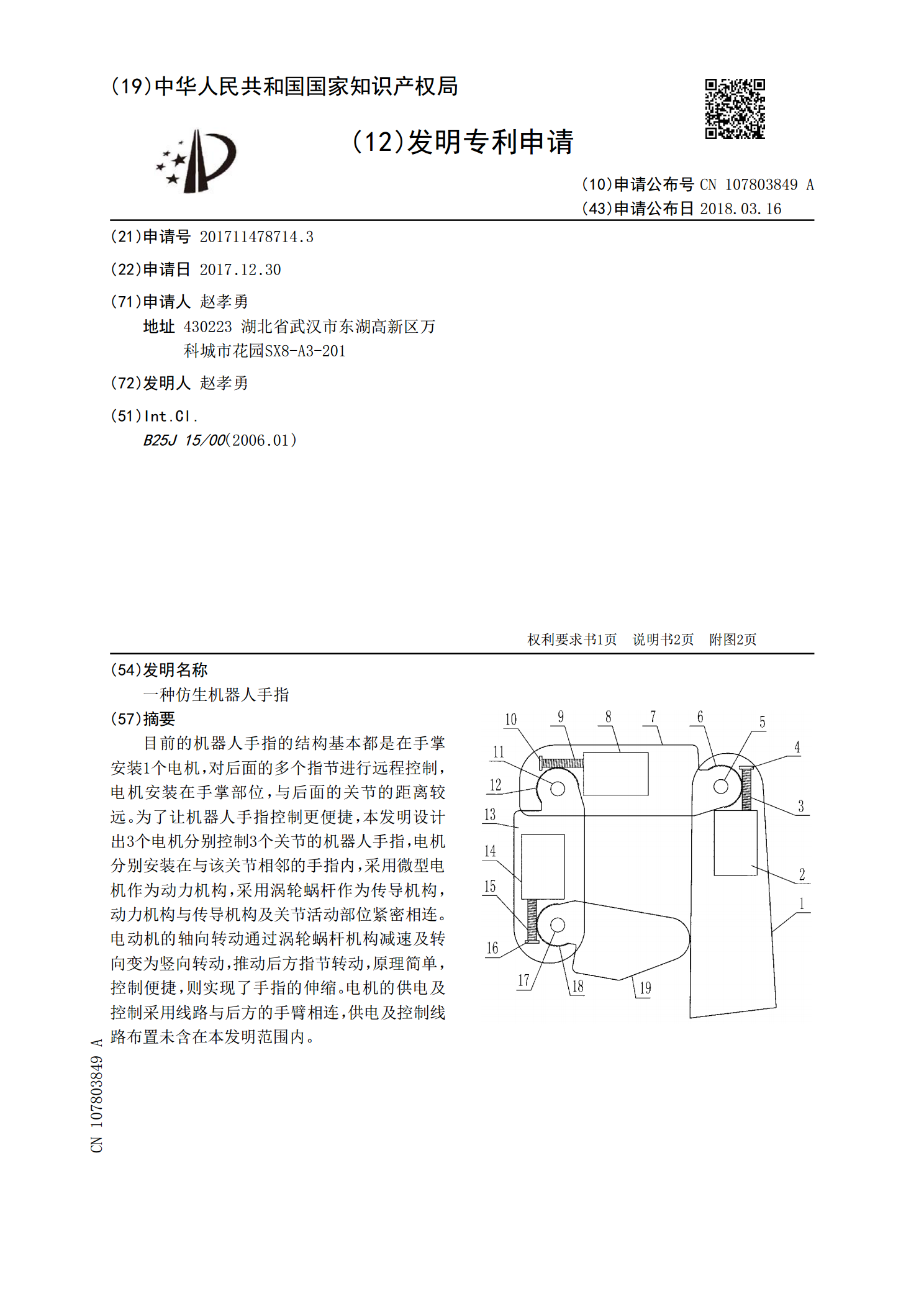
目前的机器人手指的结构基本都是在手掌安装1个电机,对后面的多个指节进行远程控制,电机安装在手掌部位,与后面的关节的距离较远。为了让机器人手指控制更便捷,本发明设计出3个电机分别控制3个关节的机器人手指,电机分别安装在与该关节相邻的手指内,采用微型电机作为动力机构,采用涡轮蜗杆作为传导机构,动力机构与传导机构及关节活动部位紧密相连。电动机的轴向转动通过涡轮蜗杆机构减速及转向变为竖向转动,推动后方指节转动,原理简单,控制便捷,则实现了手指的伸缩。电机的供电及控制采用线路与后方的手臂相连,供电及控制线路布置未含

一种机器人快换手指结构.pdf
本发明公开了一种机器人快换手指结构,快换手指结构包括连接块和滑块,连接块与滑块的凹槽的侧壁滑动连接,前端板和连接块的第一盲孔之间安装有一个弹簧,左侧板和右侧板底端分别开有一个条形的第一限位槽,连接块下部设有左右贯通的第一销孔,第一销轴左右两端分别伸出连接块的第一销孔左右两侧并分别插入两个第一限位槽中,左侧板和右侧板顶部高出前端板的一段板为伸出板,两个伸出板的前端下部分别开有第二限位槽,手指可拆卸连接在连接块上端,手指上设有左右延伸的第二销孔,第二销孔内设有第二销轴,第二销轴左右两端分别伸出手指左右两侧并分
一种手指肌腱康复机器人.pdf
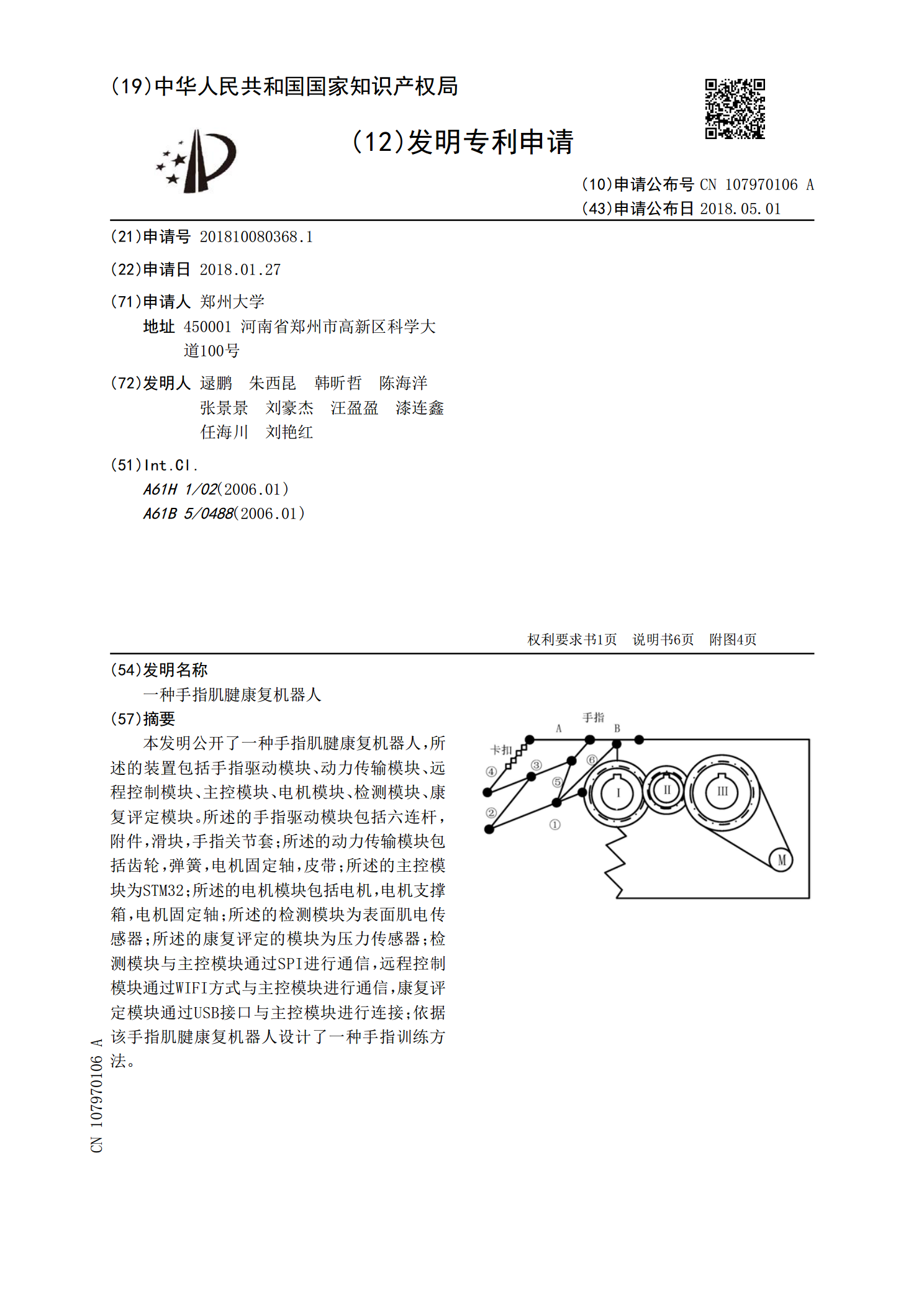
本发明公开了一种手指肌腱康复机器人,所述的装置包括手指驱动模块、动力传输模块、远程控制模块、主控模块、电机模块、检测模块、康复评定模块。所述的手指驱动模块包括六连杆,附件,滑块,手指关节套;所述的动力传输模块包括齿轮,弹簧,电机固定轴,皮带;所述的主控模块为STM32;所述的电机模块包括电机,电机支撑箱,电机固定轴;所述的检测模块为表面肌电传感器;所述的康复评定的模块为压力传感器;检测模块与主控模块通过SPI进行通信,远程控制模块通过WIFI方式与主控模块进行通信,康复评定模块通过USB接口与主控模块进行

一种腱驱动的机器人手指机构.pdf
一种腱驱动的机器人手指机构,属于机器人技术领域。关节正向转动采用腱驱动、反向采用扭簧力回复驱动方式,结构简单、可靠,能够满足抓握操作的需要。基关节的轴套外部套装有基关节回复扭簧,基关节回复扭簧两端与近指节传力件和基座连接;末端关节腱轮与末端指节传力件固连,末端关节轴通过末端关节轴端轴承支撑在近指节左、右侧板上;末端指节左、右侧板通过末端指节支撑轴承支撑在近指节左、右侧板上,末端关节回复扭簧两端与末端指节传力件和近指节左侧板连接;基关节腱一端固定缠绕在基关节腱轮的轮槽内,另一端穿出基关节腱鞘;末端关节腱一端