
行驶控制系统和行驶控制方法.pdf

书生****ma


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共40页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
行驶控制系统和行驶控制方法.pdf
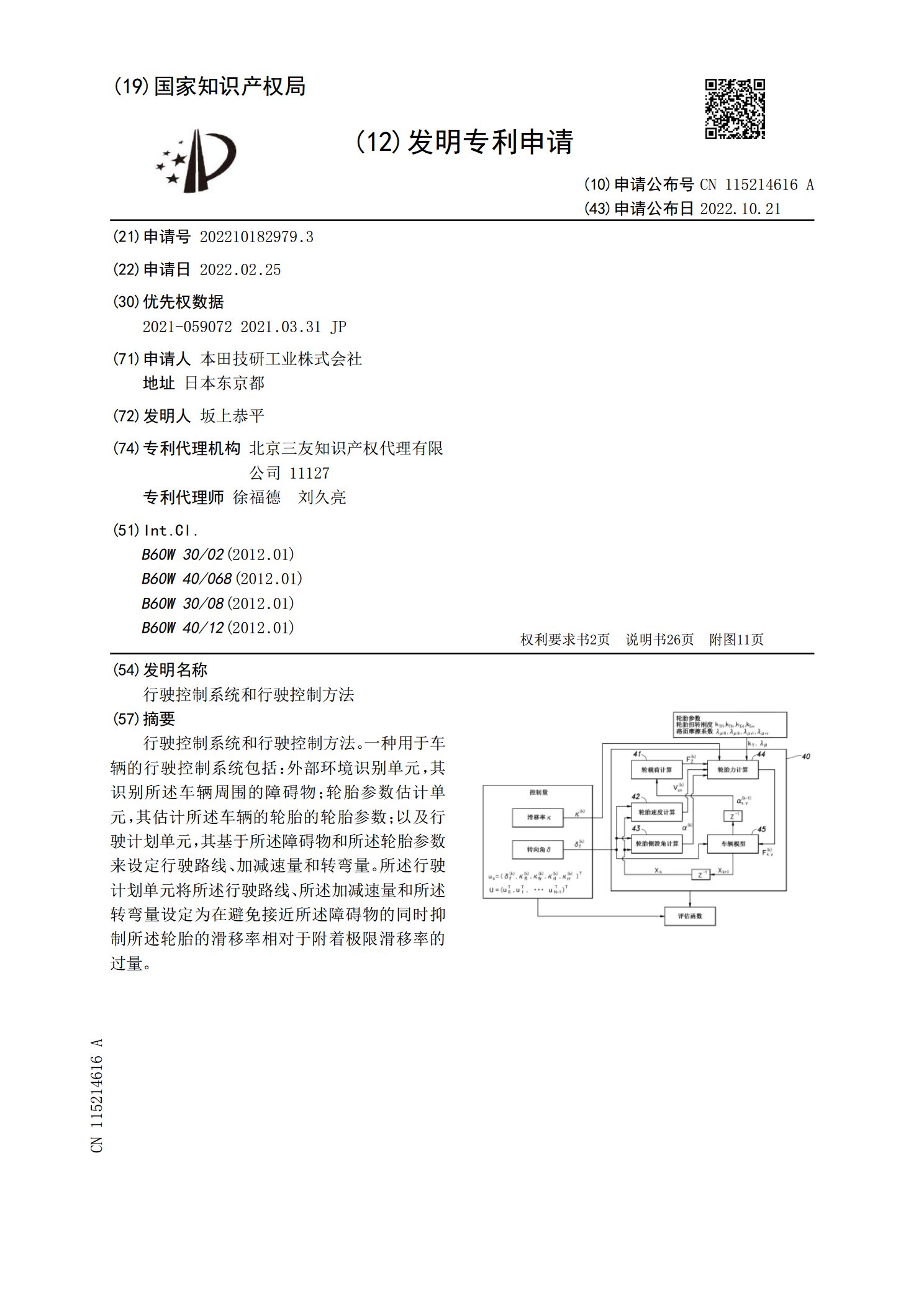
行驶控制系统和行驶控制方法。一种用于车辆的行驶控制系统包括:外部环境识别单元,其识别所述车辆周围的障碍物;轮胎参数估计单元,其估计所述车辆的轮胎的轮胎参数;以及行驶计划单元,其基于所述障碍物和所述轮胎参数来设定行驶路线、加减速量和转弯量。所述行驶计划单元将所述行驶路线、所述加减速量和所述转弯量设定为在避免接近所述障碍物的同时抑制所述轮胎的滑移率相对于附着极限滑移率的过量。
自主行驶控制设备、自主行驶控制系统和自主行驶控制方法.pdf
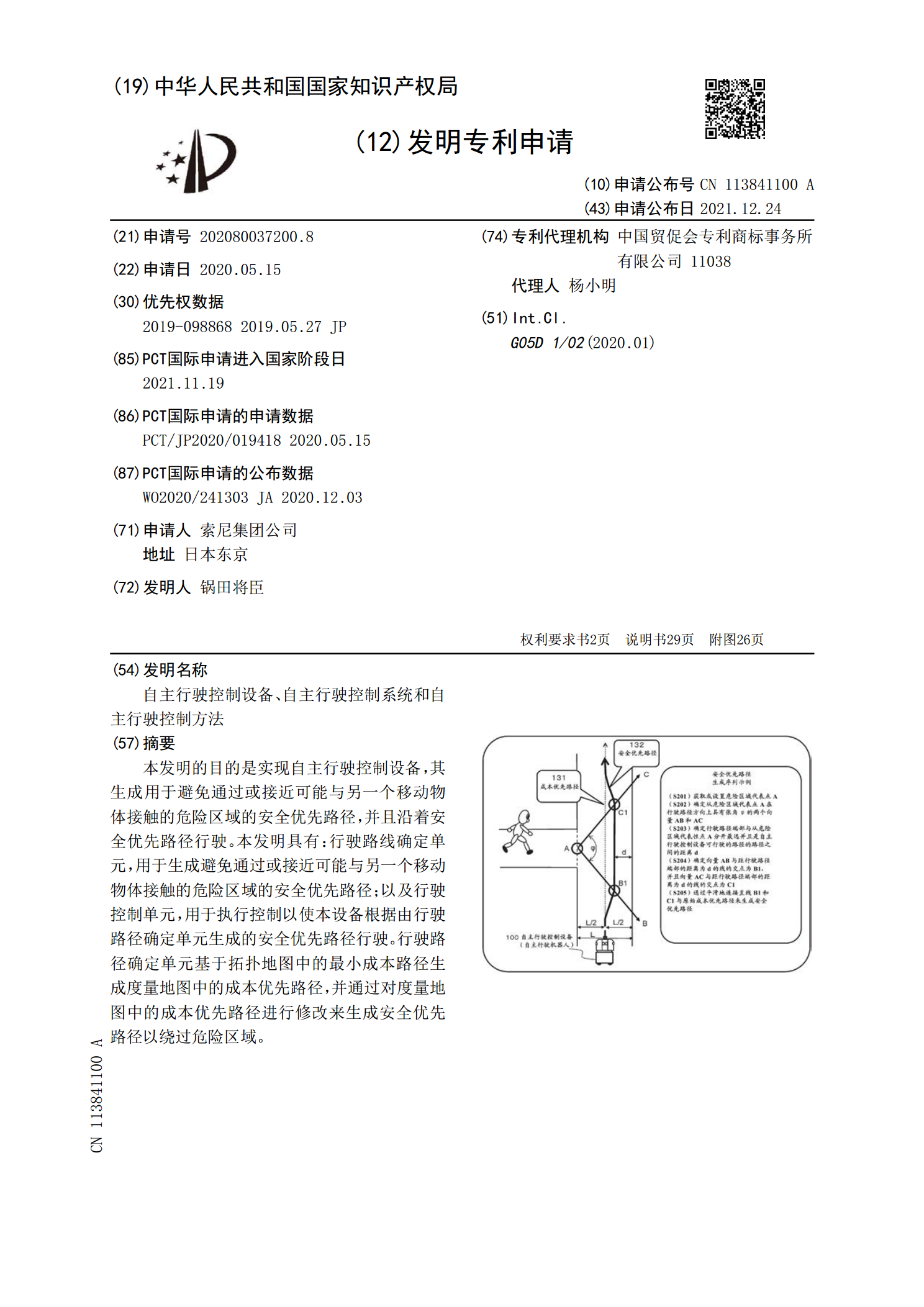
本发明的目的是实现自主行驶控制设备,其生成用于避免通过或接近可能与另一个移动物体接触的危险区域的安全优先路径,并且沿着安全优先路径行驶。本发明具有:行驶路线确定单元,用于生成避免通过或接近可能与另一个移动物体接触的危险区域的安全优先路径;以及行驶控制单元,用于执行控制以使本设备根据由行驶路径确定单元生成的安全优先路径行驶。行驶路径确定单元基于拓扑地图中的最小成本路径生成度量地图中的成本优先路径,并通过对度量地图中的成本优先路径进行修改来生成安全优先路径以绕过危险区域。
车辆的队列行驶控制系统和方法.pdf
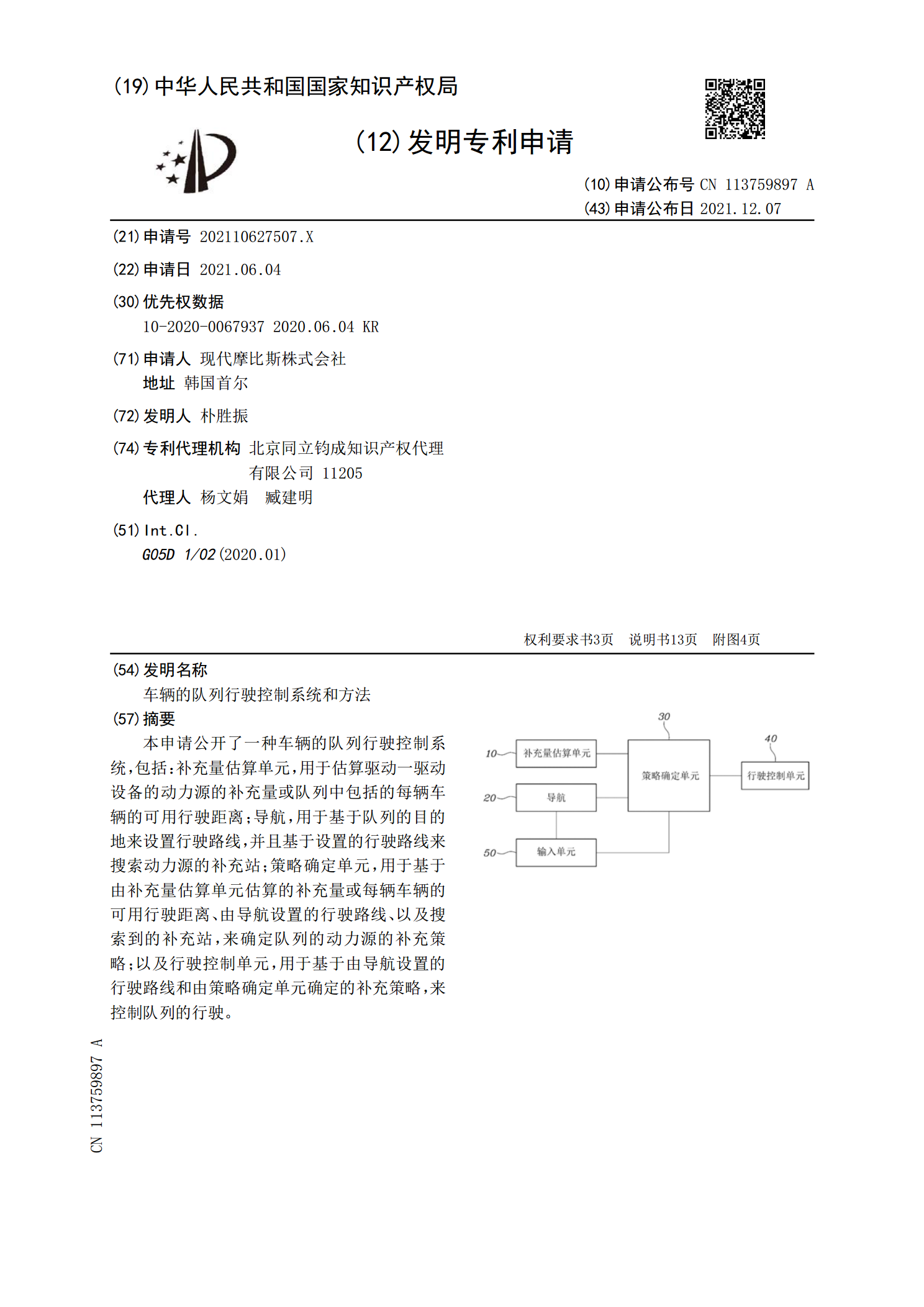
本申请公开了一种车辆的队列行驶控制系统,包括:补充量估算单元,用于估算驱动一驱动设备的动力源的补充量或队列中包括的每辆车辆的可用行驶距离;导航,用于基于队列的目的地来设置行驶路线,并且基于设置的行驶路线来搜索动力源的补充站;策略确定单元,用于基于由补充量估算单元估算的补充量或每辆车辆的可用行驶距离、由导航设置的行驶路线、以及搜索到的补充站,来确定队列的动力源的补充策略;以及行驶控制单元,用于基于由导航设置的行驶路线和由策略确定单元确定的补充策略,来控制队列的行驶。

用于车辆的行驶控制系统和方法.pdf
本申请提供了一种用于车辆的行驶控制系统和方法,以在自主行驶模式切换到驾驶员的行驶模式时易于确定转向盘的转动位置。行驶控制系统包括:显示机构,该显示机构设置在转向盘的中央部分,以显示转向盘的转动位置;以及控制器,当输入轮胎的转向角并且自主行驶模式切换到驾驶员行驶模式时,该控制器基于轮胎的转向角控制显示机构以显示转向盘的转动位置。

车辆行驶的控制系统及方法.pdf
本发明适用于车辆控制技术领域,提供了一种车辆行驶的控制系统及方法,包括:车辆预行驶状态采集单元,用于采集车辆预行驶状态信息和/或驾驶员状态信息;车辆运行工况采集单元,用于采集车辆运行工况信息;控制单元,用于根据接收到的所述车辆预行驶状态信息和/或所述驾驶员状态信息以及所述车辆运行工况信息,确定车辆的驾驶行为;处理单元,用于根据所述车辆的驾驶行为监测对应的盲区信息,从而可以根据车辆的驾驶行为显示车辆对应的盲区图像,降低或避免交通事故的发生,提高车辆行驶安全性。