
一种自适应移动机器人.pdf

又珊****ck


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种自适应移动机器人.pdf
本发明公开了一种自适应移动机器人,包括车架和设置在车架上的轮足、空间姿态传感器、九轴传感器、处理器和电源,所述空间姿态传感器和九轴传感器均与处理器相连,空间姿态传感器和九轴传感器共同检测机器人行驶过程中的姿态角度变化,并通过处理器控制四个轮足进行实时调整,使得车架保持水平状态;所述电源为轮足、空间姿态传感器、九轴传感器以及处理器提供电能。采用轮足腿部设计方案,实现了四轮足腿部机构随地面凹凸情况不同,主动调整腿部高度,保证运输平台的平稳性,能够更好的应用于室外不平的地面工况环境,最大限度保证了物品运输的稳定
一种井下管道自适应移动机器人.pdf
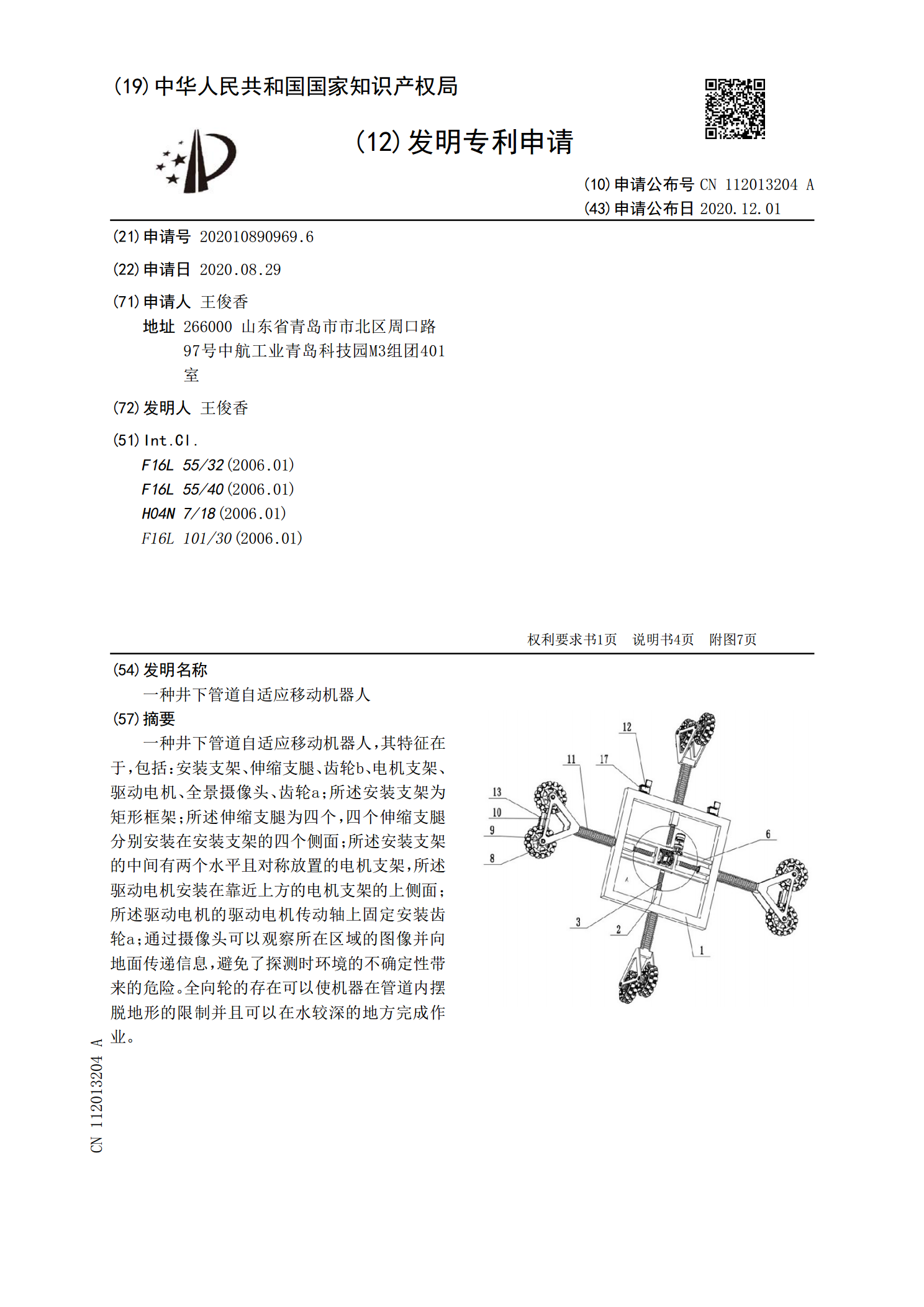
一种井下管道自适应移动机器人,其特征在于,包括:安装支架、伸缩支腿、齿轮b、电机支架、驱动电机、全景摄像头、齿轮a;所述安装支架为矩形框架;所述伸缩支腿为四个,四个伸缩支腿分别安装在安装支架的四个侧面;所述安装支架的中间有两个水平且对称放置的电机支架,所述驱动电机安装在靠近上方的电机支架的上侧面;所述驱动电机的驱动电机传动轴上固定安装齿轮a;通过摄像头可以观察所在区域的图像并向地面传递信息,避免了探测时环境的不确定性带来的危险。全向轮的存在可以使机器在管道内摆脱地形的限制并且可以在水较深的地方完成作业。

一种车轮高低差自适应的移动机器人.pdf
本发明涉及移动机器人领域,具体涉及一种车轮高低差自适应的移动机器人,该移动机器人包括车轮、伸缩臂、驱动源、水平传感器、惯性传感器和控制中心,该移动机器人还包括加权调整单元和伸缩臂动作控制单元,该加权调整单元与惯性传感器连接,该加权调整单元对惯性信息的加权值逐渐变化进而调整。本发明通过设计一种车轮高低差自适应的移动机器人,通过惯性传感器提高伸缩杆的伸缩精确度,提高移动机器人的稳定性,防止翻车。

一种自适应式移动机器人的底盘装置.pdf
本发明提供了一种自适应式移动机器人的底盘装置,左摆臂与底盘本体为活动连接,左摆臂两端分别安装有第一中排驱动轮和第一从动轮,右摆臂与底盘本体为活动连接,右摆臂两端分别安装有第二中排驱动轮和第二从动轮。本发明的有益效果是:本发明通过三个铰接轴将底盘的六个轮子与底盘本体连接,实现在任何路面情况下六个轮子始终保持与地面接触;同时在载荷变化的情况下中排的驱动轮的支撑力也随之变化,从而保证中排驱动轮具备足够的驱动力;特别是在爬坡开始阶段,前排的从动轮向上抬升的同时中排的驱动轮向下压,使驱动轮与地面的压力增大,防止驱动
一种复合移动机器人自适应供料装置.pdf
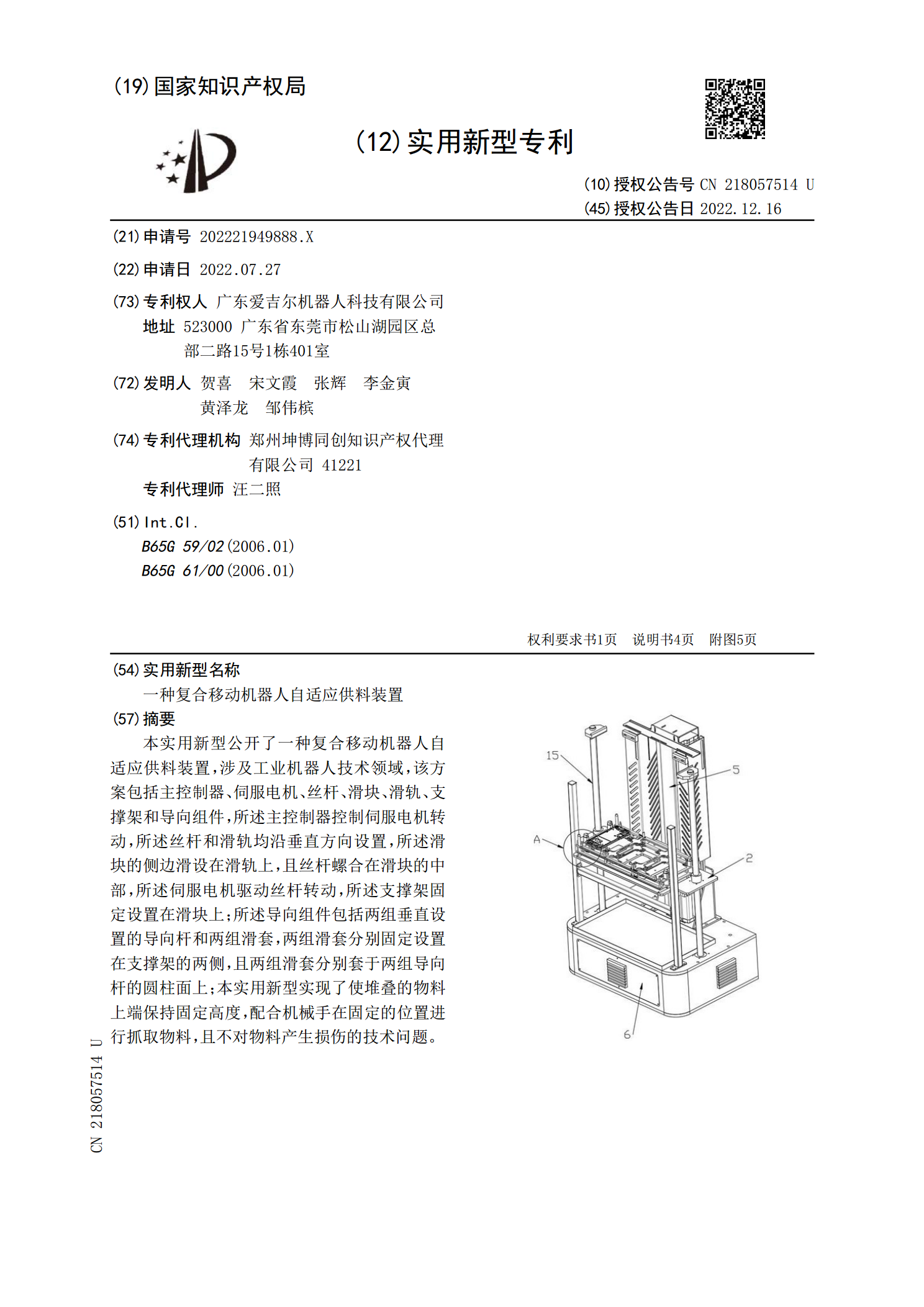
本实用新型公开了一种复合移动机器人自适应供料装置,涉及工业机器人技术领域,该方案包括主控制器、伺服电机、丝杆、滑块、滑轨、支撑架和导向组件,所述主控制器控制伺服电机转动,所述丝杆和滑轨均沿垂直方向设置,所述滑块的侧边滑设在滑轨上,且丝杆螺合在滑块的中部,所述伺服电机驱动丝杆转动,所述支撑架固定设置在滑块上;所述导向组件包括两组垂直设置的导向杆和两组滑套,两组滑套分别固定设置在支撑架的两侧,且两组滑套分别套于两组导向杆的圆柱面上;本实用新型实现了使堆叠的物料上端保持固定高度,配合机械手在固定的位置进行抓取物