
一种自适应式移动机器人的底盘装置.pdf

飞舟****文章


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种自适应式移动机器人的底盘装置.pdf
本发明提供了一种自适应式移动机器人的底盘装置,左摆臂与底盘本体为活动连接,左摆臂两端分别安装有第一中排驱动轮和第一从动轮,右摆臂与底盘本体为活动连接,右摆臂两端分别安装有第二中排驱动轮和第二从动轮。本发明的有益效果是:本发明通过三个铰接轴将底盘的六个轮子与底盘本体连接,实现在任何路面情况下六个轮子始终保持与地面接触;同时在载荷变化的情况下中排的驱动轮的支撑力也随之变化,从而保证中排驱动轮具备足够的驱动力;特别是在爬坡开始阶段,前排的从动轮向上抬升的同时中排的驱动轮向下压,使驱动轮与地面的压力增大,防止驱动

一种自适应重力调节的底盘装置.pdf
本发明公开了一种自适应重力调节的底盘装置,包括:底盘组件,包括前连接座及后连接座,后连接座铰接在前连接座后端;弹性支撑板,沿前后方向横跨于前连接座和后连接座之间;在前连接座内设有可沿活动的支承部件,后连接座相对前连接座转动以撬动弹性支撑板以支承部件为转动支点发生弹性形变;弹性下沉机构,弹性下沉机构包括设置在后连接座内的沉槽、沉块及压簧;沉块上端设有用于连接椅座的后支杆;驱动机构,用于控制支承部件移动;驱动机构包括拉线及伸缩组件;拉线后端连接在沉块上,拉线前端设置在前连接座的前端并作为输出端,伸缩组件连接在

一种快捷式安装底盘的装置.pdf
一种快捷式安装底盘的装置,它包括底盘、螺杆锁紧装置、导向滚轮、锥形定位销、安装螺孔,其特征是底盘两侧分别设有螺杆锁紧装置和若干个导向滚轮,底盘的一端设有两个锥形定位销,底盘的底部设有若干个安装螺孔。本发明的技术效果是:该装置经用户跑车试验验证,具有快捷化安装效果,大大缩短了车载电站的维修保养时间,且耐冲击振动效果好,可靠性高。

一种底盘式车辆防水装置及系统.pdf
本发明提供一种底盘式车辆防水装置,包括第一至第三防水底板、侧面防水挡板、前后防水挡板和爬升引导板,第一防水底板和第二防水底板的底部均连接有腔体,腔体内设有隔板、驱动轴、以及对称布置于驱动轴两侧的一个传动轴和两个过渡轴,隔板将腔体分隔成第一腔室和第二腔室,第一腔室内转动设有两个摩擦棒,第二腔室内设有驱动齿轮,以及对称布置于驱动齿轮两侧的一个传动齿轮和两个过渡齿轮,每个传动轴上固定一个传动齿轮,每个过渡轴上固定一个过渡齿轮,传动轴穿过隔板和摩擦棒并且两端转动设置于腔体上,过渡轴的两端分别转动设置于腔体和隔板上
一种自适应式带式输送装置.pdf
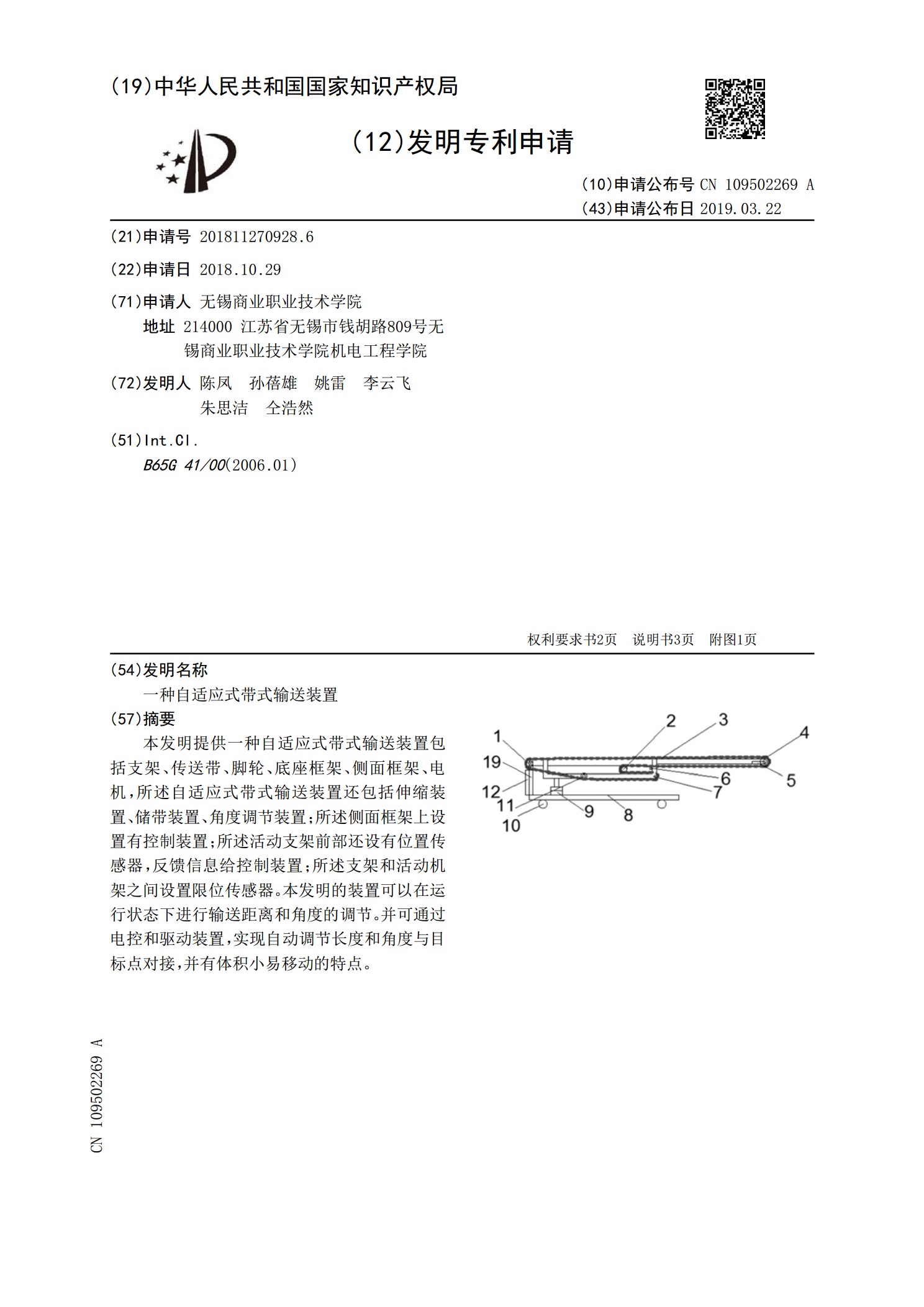
本发明提供一种自适应式带式输送装置包括支架、传送带、脚轮、底座框架、侧面框架、电机,所述自适应式带式输送装置还包括伸缩装置、储带装置、角度调节装置;所述侧面框架上设置有控制装置;所述活动支架前部还设有位置传感器,反馈信息给控制装置;所述支架和活动机架之间设置限位传感器。本发明的装置可以在运行状态下进行输送距离和角度的调节。并可通过电控和驱动装置,实现自动调节长度和角度与目标点对接,并有体积小易移动的特点。