
一种井下管道自适应移动机器人.pdf

宜欣****外呢


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种井下管道自适应移动机器人.pdf
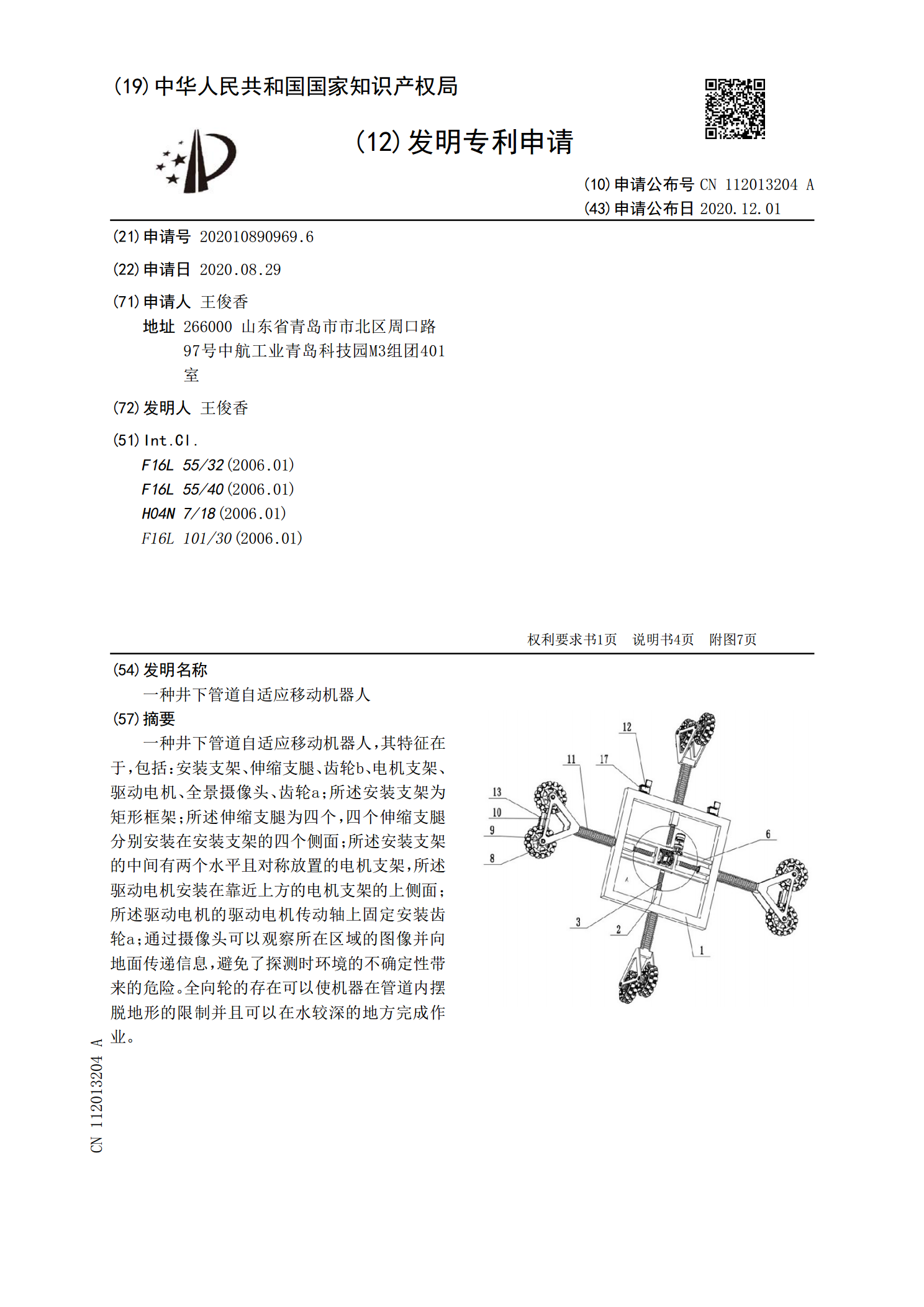
一种井下管道自适应移动机器人,其特征在于,包括:安装支架、伸缩支腿、齿轮b、电机支架、驱动电机、全景摄像头、齿轮a;所述安装支架为矩形框架;所述伸缩支腿为四个,四个伸缩支腿分别安装在安装支架的四个侧面;所述安装支架的中间有两个水平且对称放置的电机支架,所述驱动电机安装在靠近上方的电机支架的上侧面;所述驱动电机的驱动电机传动轴上固定安装齿轮a;通过摄像头可以观察所在区域的图像并向地面传递信息,避免了探测时环境的不确定性带来的危险。全向轮的存在可以使机器在管道内摆脱地形的限制并且可以在水较深的地方完成作业。

一种自适应移动机器人.pdf
本发明公开了一种自适应移动机器人,包括车架和设置在车架上的轮足、空间姿态传感器、九轴传感器、处理器和电源,所述空间姿态传感器和九轴传感器均与处理器相连,空间姿态传感器和九轴传感器共同检测机器人行驶过程中的姿态角度变化,并通过处理器控制四个轮足进行实时调整,使得车架保持水平状态;所述电源为轮足、空间姿态传感器、九轴传感器以及处理器提供电能。采用轮足腿部设计方案,实现了四轮足腿部机构随地面凹凸情况不同,主动调整腿部高度,保证运输平台的平稳性,能够更好的应用于室外不平的地面工况环境,最大限度保证了物品运输的稳定

一种井下越障移动机器人.pdf
本发明公开了一种井下越障移动机器人,包括机架、底盘、绕柱抱紧模块、摩擦轮模块和距离传感器;底盘安装在机架的下端,摩擦轮模块设在底盘上端的机架上,绕柱抱紧模块设在机架的后端,距离传感器安装在机架的前后两端;绕柱抱紧模块用于驱动底盘下降和上升,并利用套环抱紧立柱再通过驱动摩擦轮正反转来实现机器人的旋转。本发明可根据地形动态调整底盘距地面的高度,克服了传统移动机器人平台地形适应性差的缺点,具有较强的通过性能,能满足井下复杂环境工作的多种需求,可爬坡、越障、在非平整地形下平稳前进和侧移,具有结构简单,控制方便,可

一种自适应管道爬行器.pdf
本发明公开了一自适应管道爬行器,包括1个主驱动模块和若干拖行模块,其中主驱动模块包括电机、主支架、蜗轮、蜗杆、阻尼器、轮支架、同步带轮、同步带、行走轮;拖行模块包括支架、阻尼器、轮支架、行走轮;主驱动模块与拖行模块及各拖行模块之间以球头杆与球槽杆组成的球铰链联接。本爬行器具备驱动自锁功能,可以满足管道内径变化、拐弯、管道垂直情况的爬行要求。
一种自适应的井下喷雾降尘系统.pdf
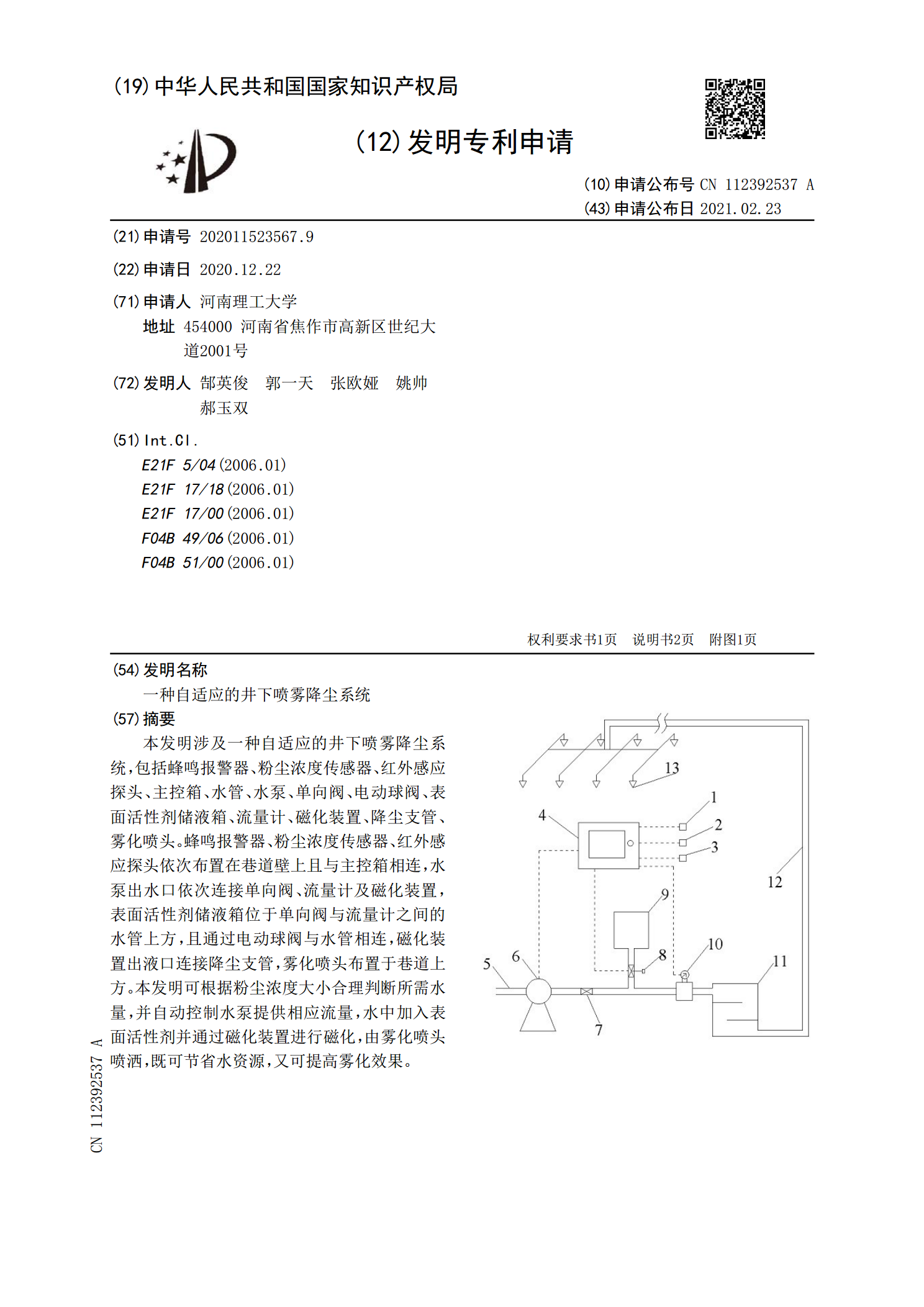
本发明涉及一种自适应的井下喷雾降尘系统,包括蜂鸣报警器、粉尘浓度传感器、红外感应探头、主控箱、水管、水泵、单向阀、电动球阀、表面活性剂储液箱、流量计、磁化装置、降尘支管、雾化喷头。蜂鸣报警器、粉尘浓度传感器、红外感应探头依次布置在巷道壁上且与主控箱相连,水泵出水口依次连接单向阀、流量计及磁化装置,表面活性剂储液箱位于单向阀与流量计之间的水管上方,且通过电动球阀与水管相连,磁化装置出液口连接降尘支管,雾化喷头布置于巷道上方。本发明可根据粉尘浓度大小合理判断所需水量,并自动控制水泵提供相应流量,水中加入表面活