
一种基于驾驶状态识别的智能车辆底盘协调控制系统及方法.pdf

一吃****春艳

1/10
2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于驾驶状态识别的智能车辆底盘协调控制系统及方法.pdf
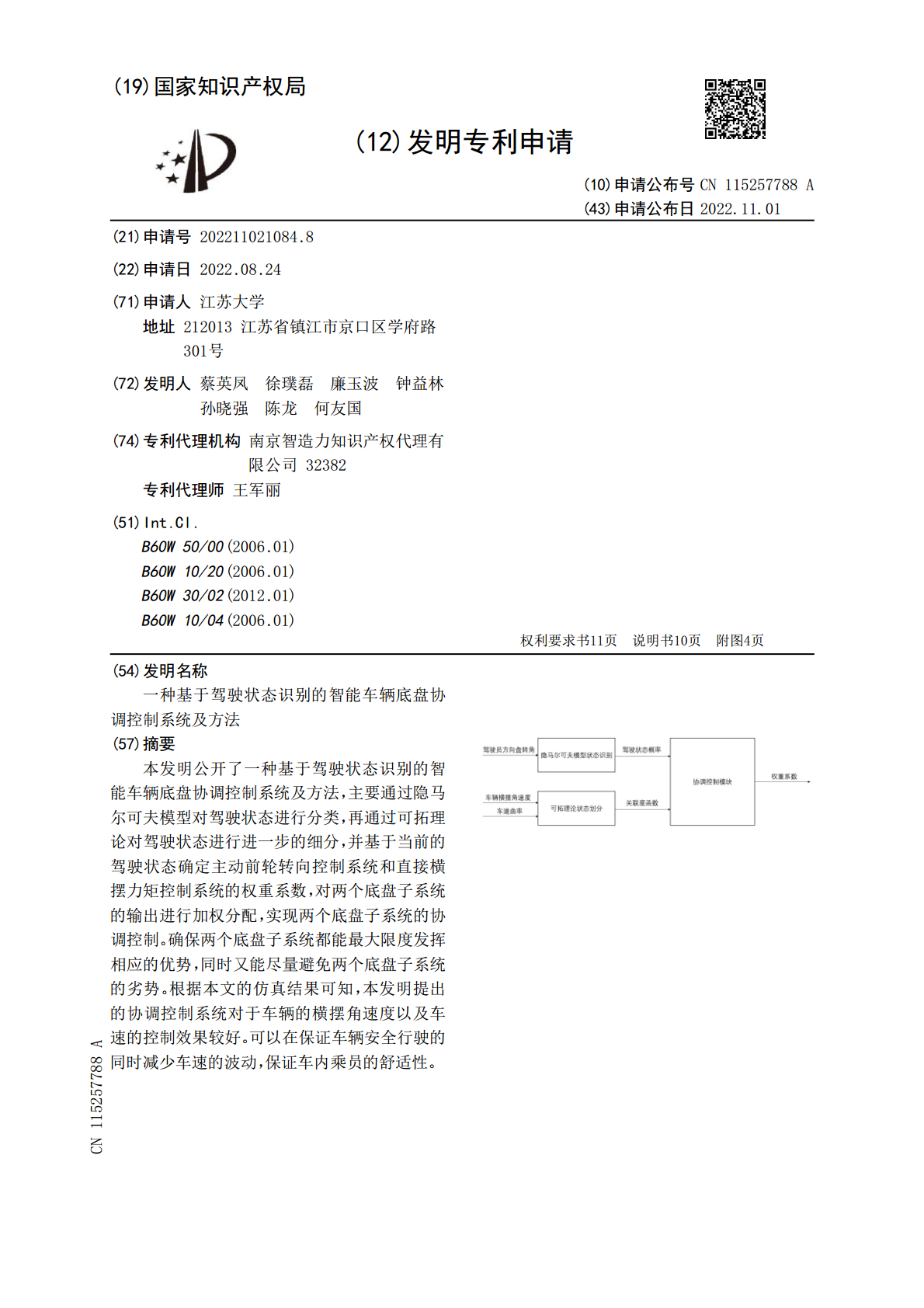
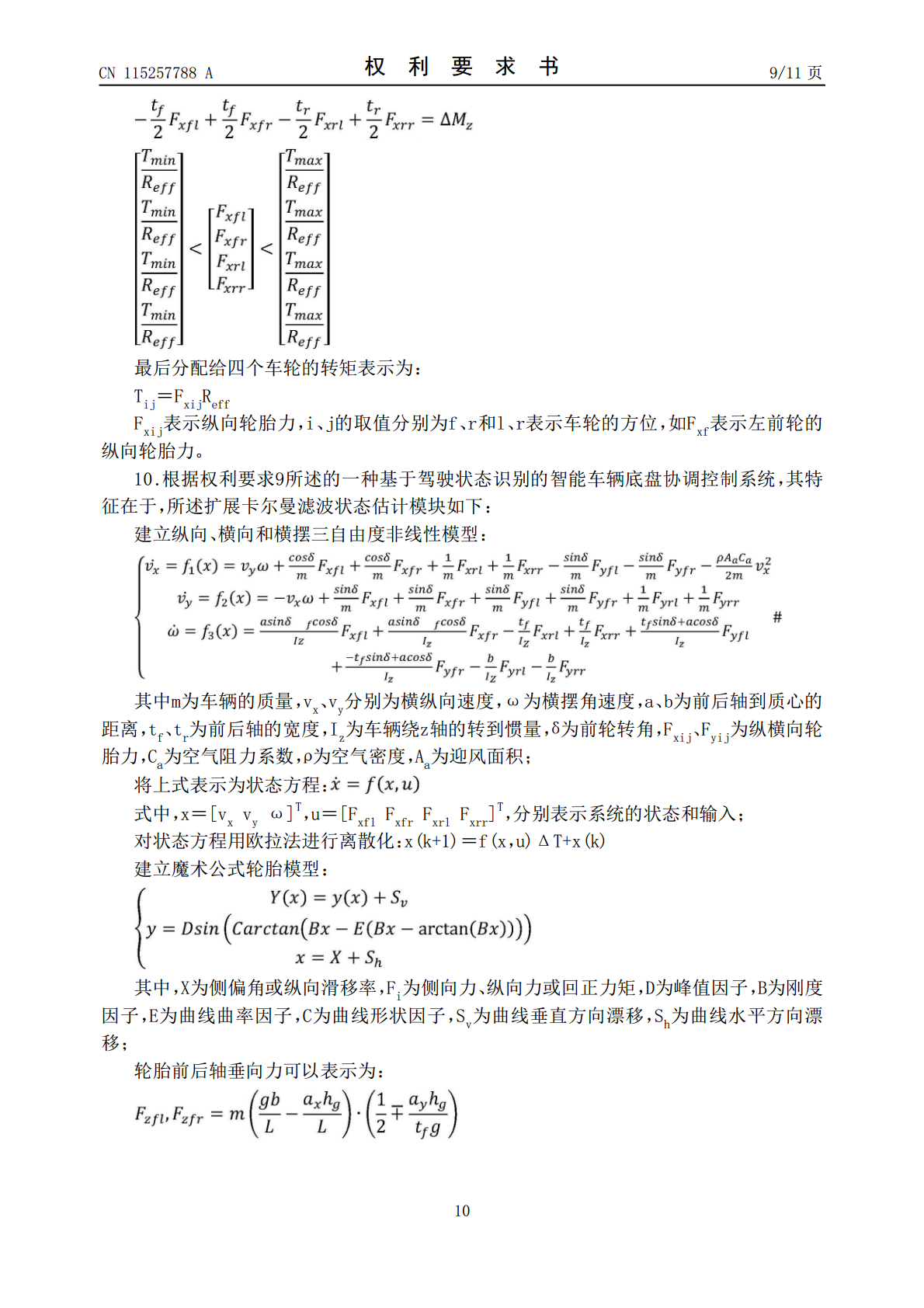
本发明公开了一种基于驾驶状态识别的智能车辆底盘协调控制系统及方法,主要通过隐马尔可夫模型对驾驶状态进行分类,再通过可拓理论对驾驶状态进行进一步的细分,并基于当前的驾驶状态确定主动前轮转向控制系统和直接横摆力矩控制系统的权重系数,对两个底盘子系统的输出进行加权分配,实现两个底盘子系统的协调控制。确保两个底盘子系统都能最大限度发挥相应的优势,同时又能尽量避免两个底盘子系统的劣势。根据本文的仿真结果可知,本发明提出的协调控制系统对于车辆的横摆角速度以及车速的控制效果较好。可以在保证车辆安全行驶的同时减少车速的波

基于智能驾驶及ADAS模拟的车辆底盘测试系统和方法.pdf
本发明公开了一种基于智能驾驶及ADAS模拟的车辆底盘测试系统及方法,包括:场景交互数据预处理模块,其接收测试车辆决策系统控制车辆的底盘执行系统作出运动响应的控制命令获得测试车辆运动信息,将测试车辆运动信息与设定好的场景进行融合处理获得相对运动目标物运动信息,将相对运动目标物运动信息发送到场景模拟装置;场景模拟装置,其根据相对运动目标物运动信息对测试场景进行实时模拟控制;路况模拟控制模块,其接收场景交互数据预处理模块发送的测试车辆运动信息和测试需求形成路况模拟控制命令;路况模拟模块,其根据路况模拟控制命令执
一种用于车辆的智能驾驶控制系统和方法.pdf
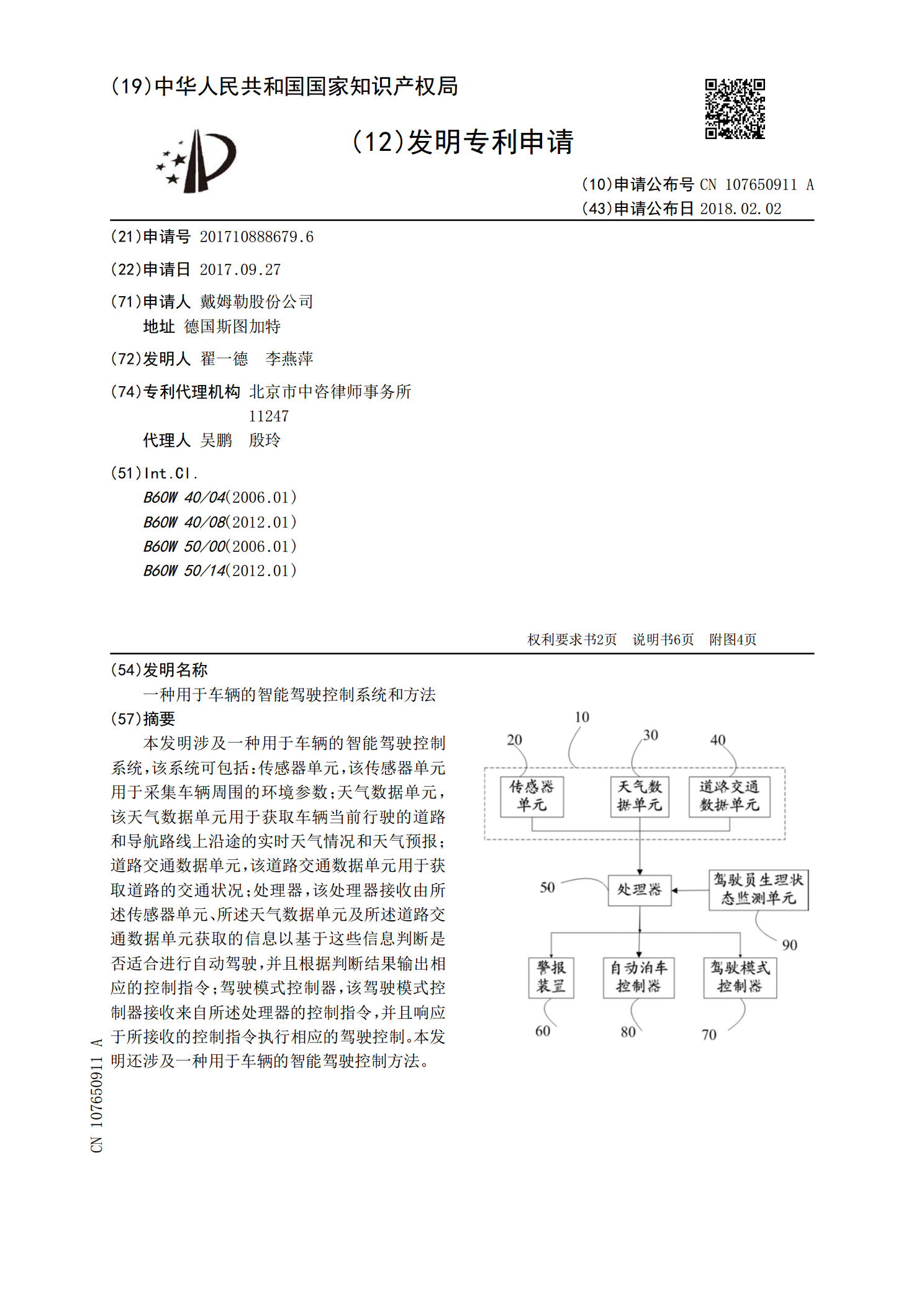
本发明涉及一种用于车辆的智能驾驶控制系统,该系统可包括:传感器单元,该传感器单元用于采集车辆周围的环境参数;天气数据单元,该天气数据单元用于获取车辆当前行驶的道路和导航路线上沿途的实时天气情况和天气预报;道路交通数据单元,该道路交通数据单元用于获取道路的交通状况;处理器,该处理器接收由所述传感器单元、所述天气数据单元及所述道路交通数据单元获取的信息以基于这些信息判断是否适合进行自动驾驶,并且根据判断结果输出相应的控制指令;驾驶模式控制器,该驾驶模式控制器接收来自所述处理器的控制指令,并且响应于所接收的控制
基于状态识别的湿式离合器智能控制系统和控制方法.pdf
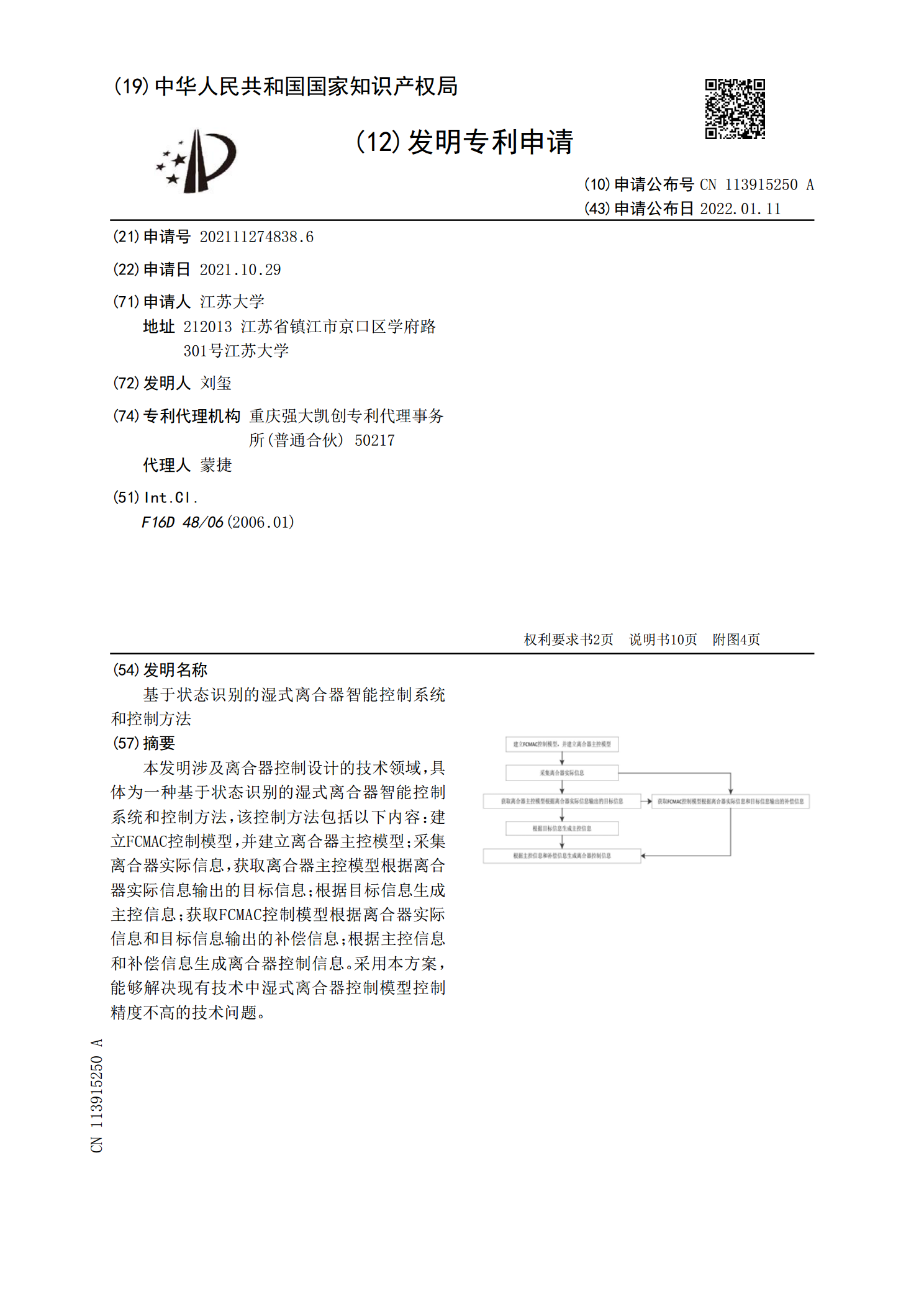
本发明涉及离合器控制设计的技术领域,具体为一种基于状态识别的湿式离合器智能控制系统和控制方法,该控制方法包括以下内容:建立FCMAC控制模型,并建立离合器主控模型;采集离合器实际信息,获取离合器主控模型根据离合器实际信息输出的目标信息;根据目标信息生成主控信息;获取FCMAC控制模型根据离合器实际信息和目标信息输出的补偿信息;根据主控信息和补偿信息生成离合器控制信息。采用本方案,能够解决现有技术中湿式离合器控制模型控制精度不高的技术问题。

基于人脸识别的车辆智能响应方法.pdf
本发明涉及车内电子系统领域,并具体公开了一种基于人脸识别的车辆智能响应方法,包括检测并获取用户当前的人脸图像数据;根据所述人脸图像数据获取所述用户所对应的用户状态,所述用户状态包括用户表情状态及用户行为状态;根据所述人脸图像数据及所述用户状态,执行响应操作,所述响应操作包括切换播放内容或切换显示内容中的任意一种或其组合。其通过人脸识别技术,记录用户的行为数据,并根据车载摄像设备采集的人脸图像判定用户的不同状态,并根据预设的规则对上述状态做出智能化的响应,进而避免了用户手动操作复杂的车载信息娱乐系统界面,在