
一种用于履带机车的驱动及转向装置.pdf

康佳****文库

1/9
2/9
3/9
4/9
5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于履带机车的驱动及转向装置.pdf
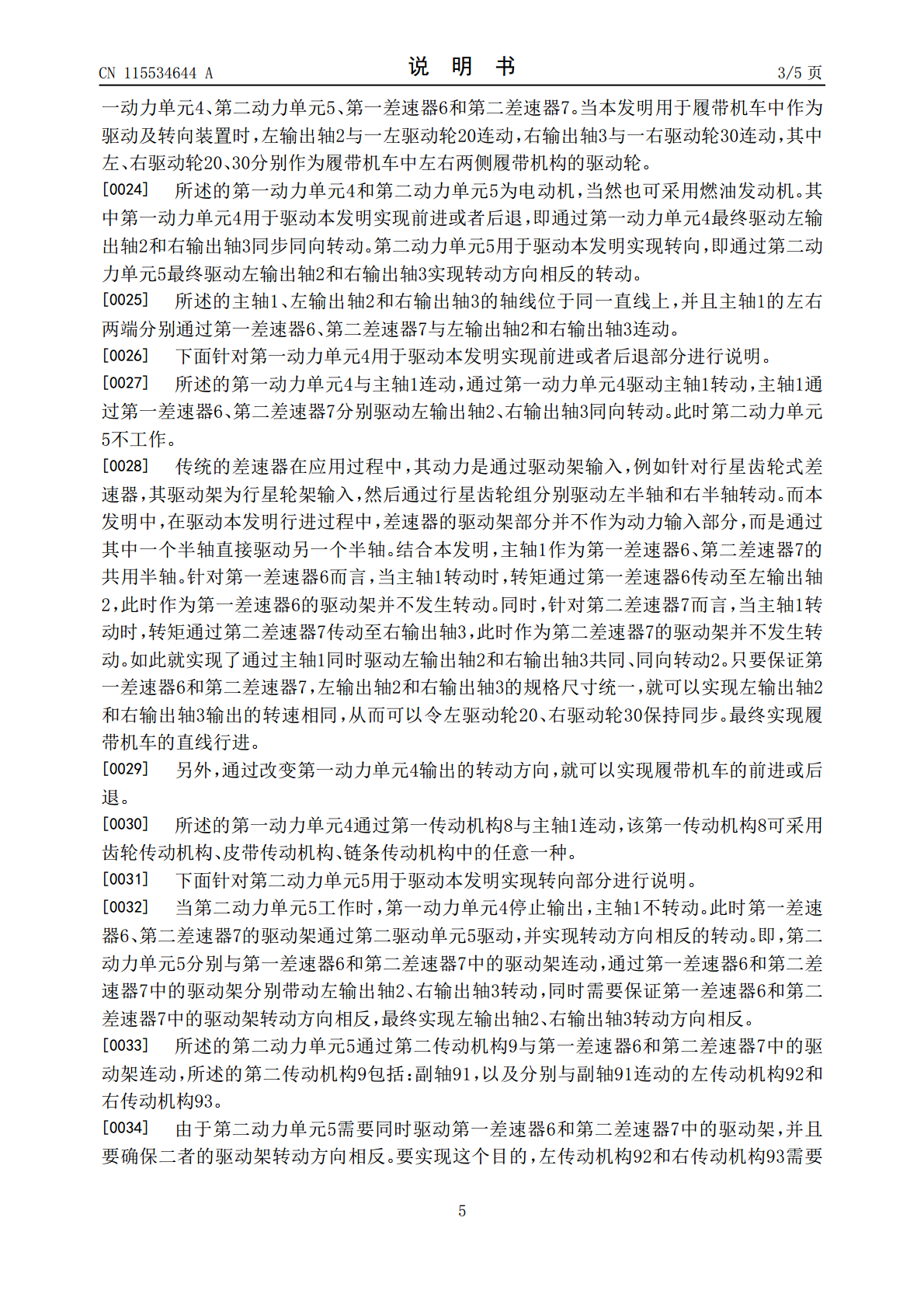
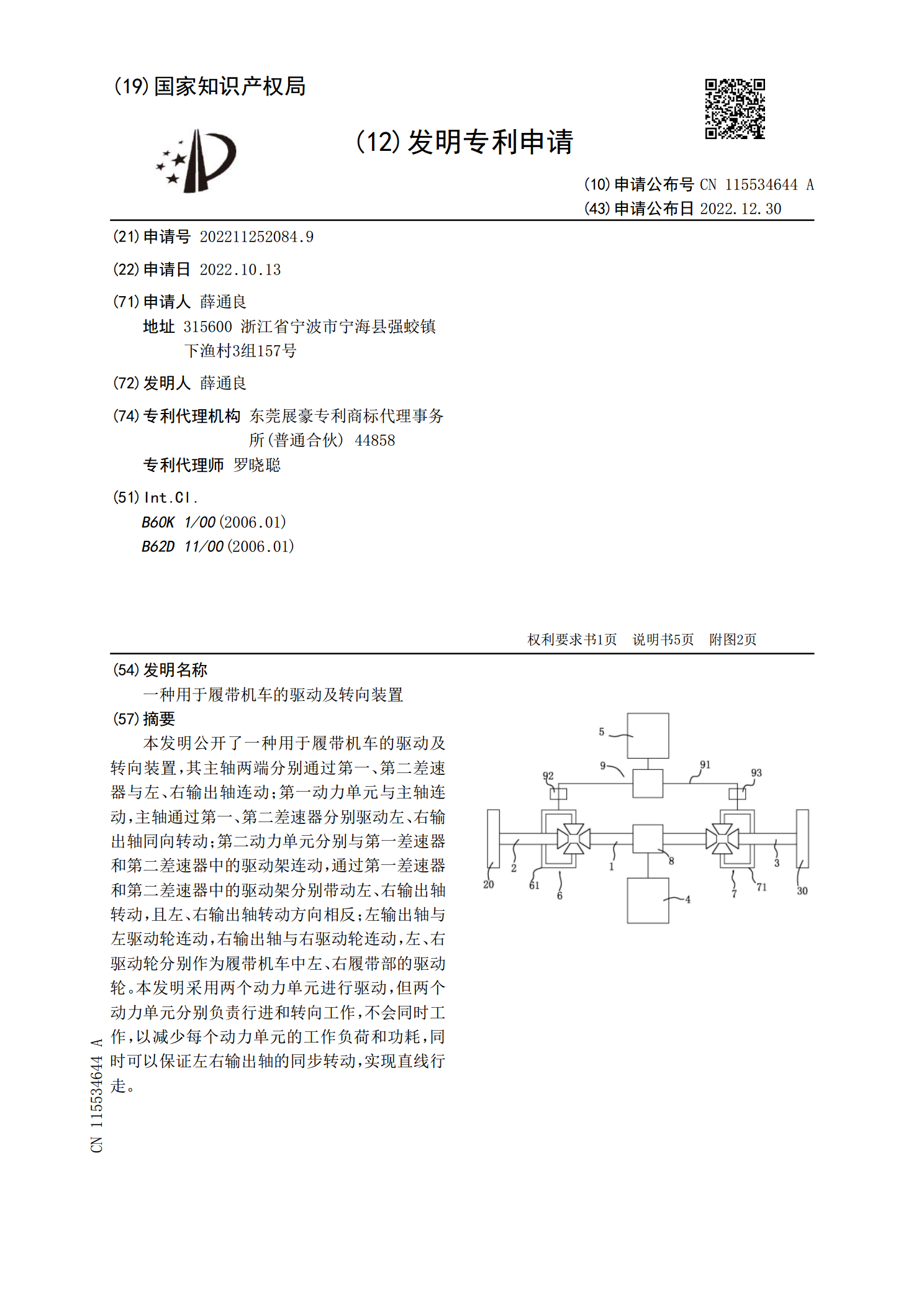
本发明公开了一种用于履带机车的驱动及转向装置,其主轴两端分别通过第一、第二差速器与左、右输出轴连动;第一动力单元与主轴连动,主轴通过第一、第二差速器分别驱动左、右输出轴同向转动;第二动力单元分别与第一差速器和第二差速器中的驱动架连动,通过第一差速器和第二差速器中的驱动架分别带动左、右输出轴转动,且左、右输出轴转动方向相反;左输出轴与左驱动轮连动,右输出轴与右驱动轮连动,左、右驱动轮分别作为履带机车中左、右履带部的驱动轮。本发明采用两个动力单元进行驱动,但两个动力单元分别负责行进和转向工作,不会同时工作,以
一种用于驱动履带车辆转向的装置及方法.pdf
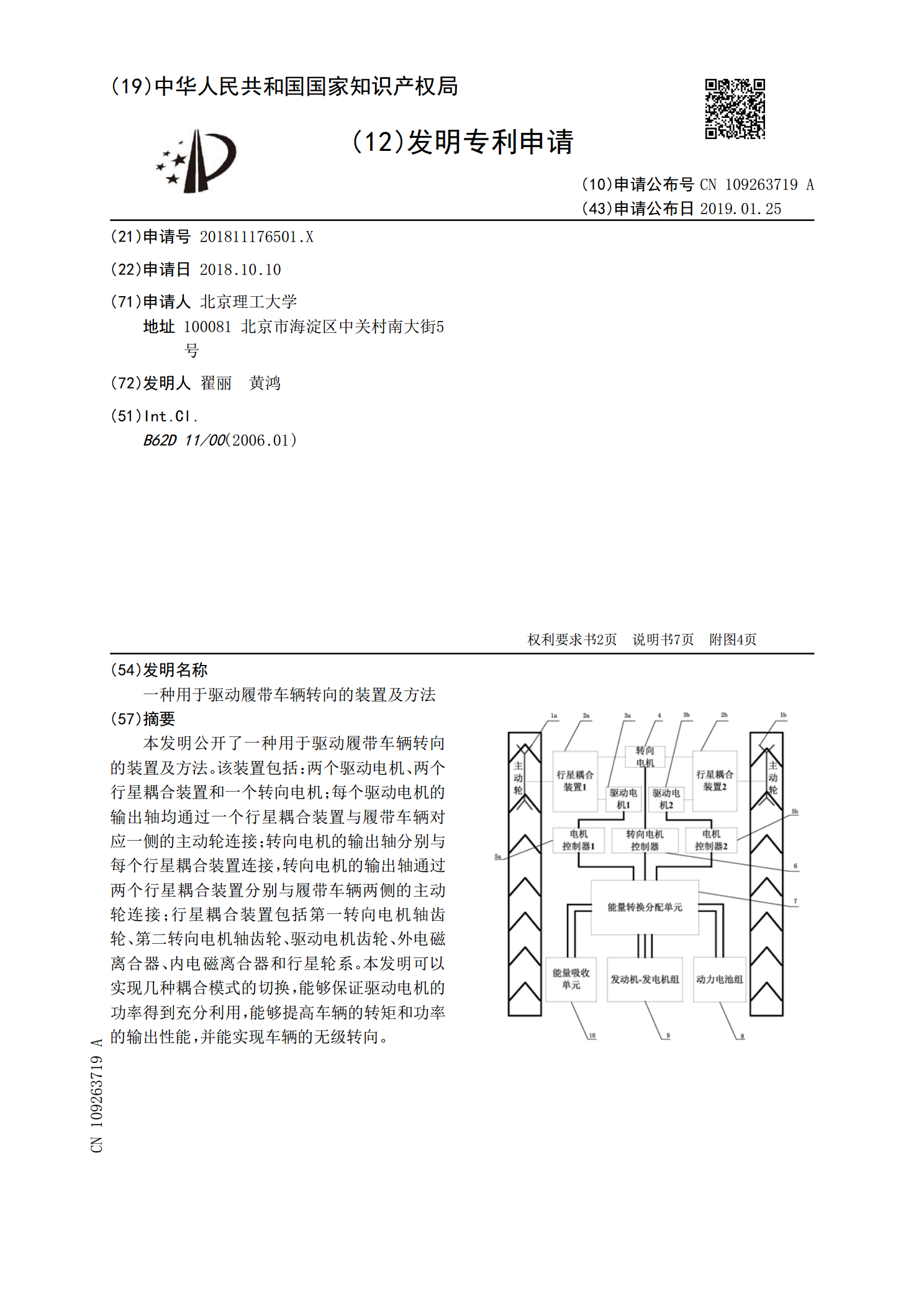
本发明公开了一种用于驱动履带车辆转向的装置及方法。该装置包括:两个驱动电机、两个行星耦合装置和一个转向电机;每个驱动电机的输出轴均通过一个行星耦合装置与履带车辆对应一侧的主动轮连接;转向电机的输出轴分别与每个行星耦合装置连接,转向电机的输出轴通过两个行星耦合装置分别与履带车辆两侧的主动轮连接;行星耦合装置包括第一转向电机轴齿轮、第二转向电机轴齿轮、驱动电机齿轮、外电磁离合器、内电磁离合器和行星轮系。本发明可以实现几种耦合模式的切换,能够保证驱动电机的功率得到充分利用,能够提高车辆的转矩和功率的输出性能,并

履带车辆的转向驱动装置.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN101041363A(43)申请公布日2007.09.26(21)申请号CN200710017788.7(22)申请日2007.04.30(71)申请人长安大学地址710064陕西省西安市长安中路33号(72)发明人郁录平邱廷铨(74)专利代理机构西安永生专利代理有限责任公司代理人申忠才(51)Int.CIB62D11/04权利要求说明书说明书幅图(54)发明名称履带车辆的转向驱动装置(57)摘要一种履带车辆的转向驱动装置,在
一种机车转向架驱动装置.pdf
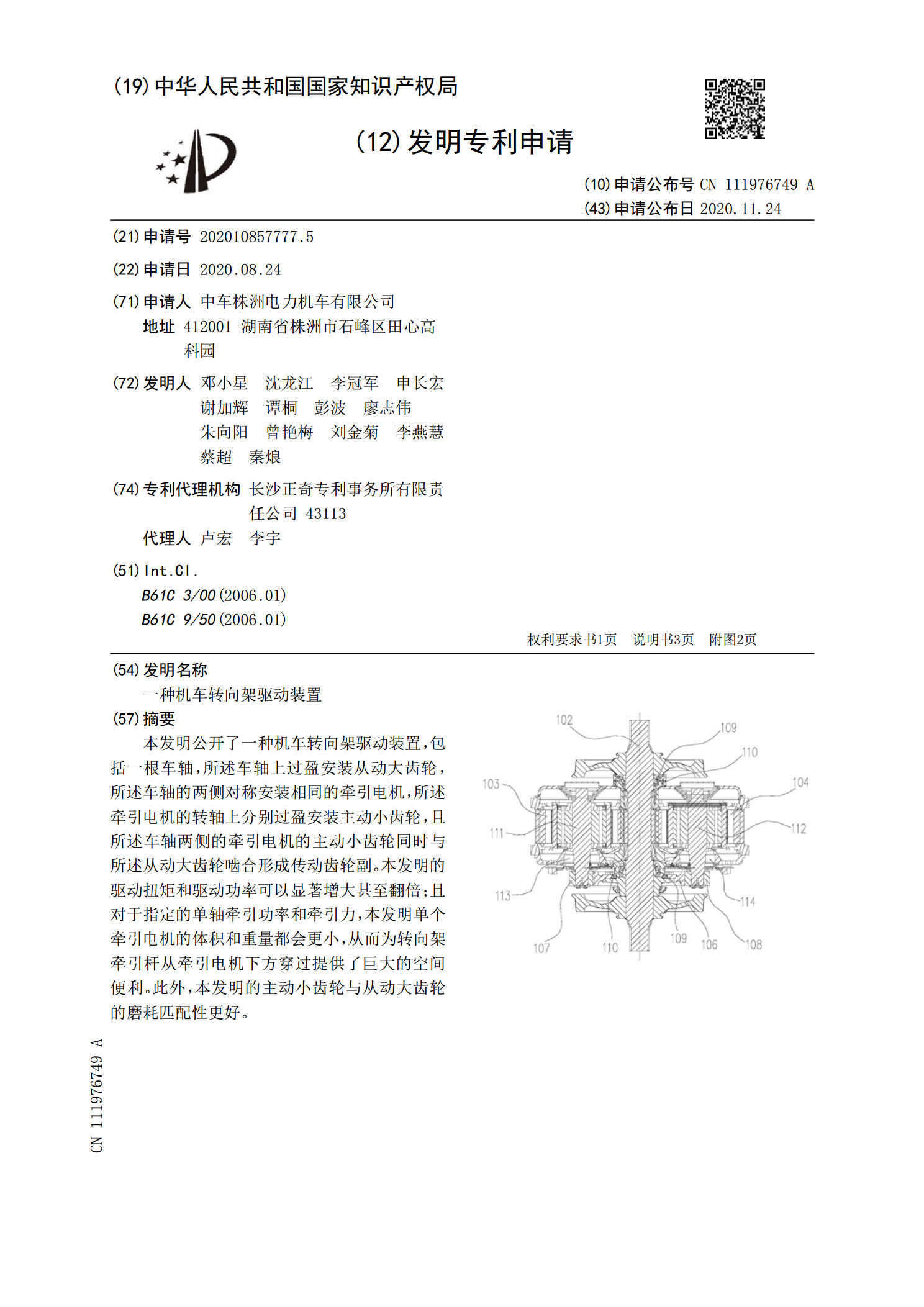
本发明公开了一种机车转向架驱动装置,包括一根车轴,所述车轴上过盈安装从动大齿轮,所述车轴的两侧对称安装相同的牵引电机,所述牵引电机的转轴上分别过盈安装主动小齿轮,且所述车轴两侧的牵引电机的主动小齿轮同时与所述从动大齿轮啮合形成传动齿轮副。本发明的驱动扭矩和驱动功率可以显著增大甚至翻倍;且对于指定的单轴牵引功率和牵引力,本发明单个牵引电机的体积和重量都会更小,从而为转向架牵引杆从牵引电机下方穿过提供了巨大的空间便利。此外,本发明的主动小齿轮与从动大齿轮的磨耗匹配性更好。

一种电力机车转向架驱动装置.pdf
本发明提供了一种电力机车转向架驱动装置,在传动齿轮箱的大齿轮一侧设置制动齿轮轴,同时设置一根平行于轮对轴中心线的独立制动轴,在该制动轴上设置制动盘,实现轴盘制动。它包括牵引电机、六连杆盘形联轴器、盘形制动器等部件,所述独立制动轴一端通过六连杆盘形联轴器与传动齿轮箱的制动齿轮轴相连,另一端通过轴承支承在与电机固定联结的制动轴支架上。本发明有效解决制动盘拆装困难的问题,同时减小了一系簧下重量,降低轮轨动作用力,改善高速转向架的垂向动力学性能。主要用于动车转向架。