
自动引导运输车及倾斜控制方法、装置、存储介质.pdf

Jo****63

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动引导运输车及倾斜控制方法、装置、存储介质.pdf
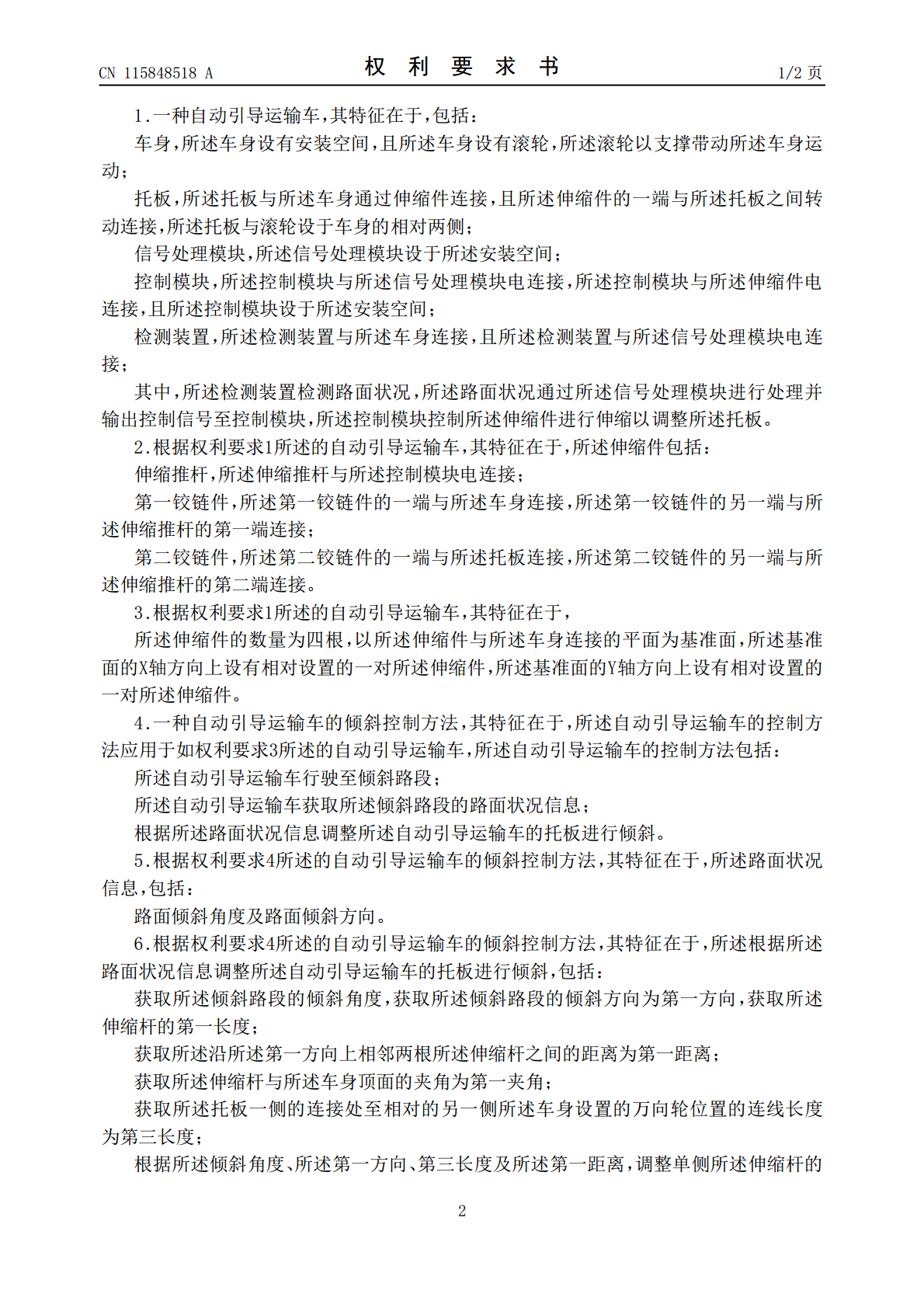
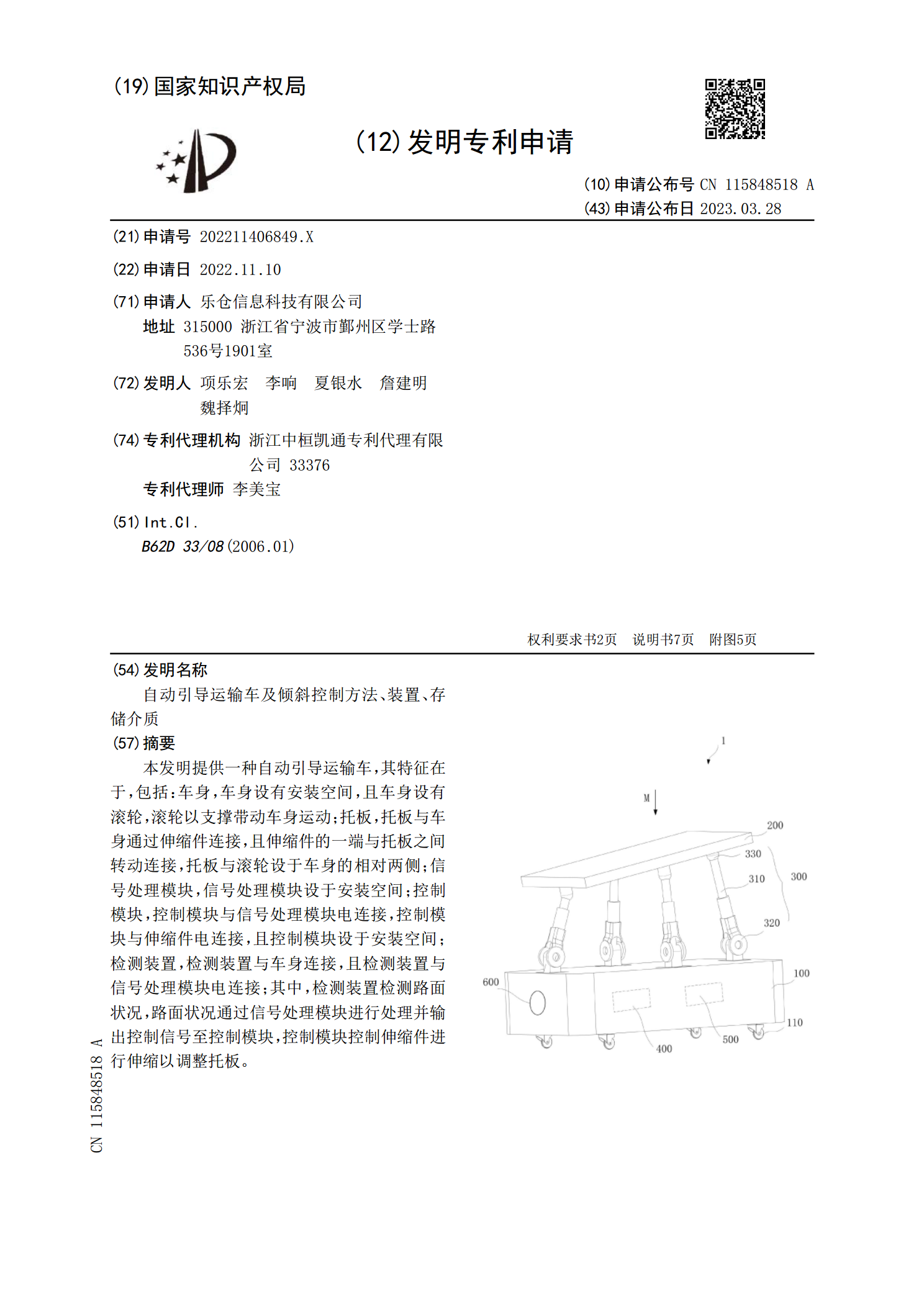
本发明提供一种自动引导运输车,其特征在于,包括:车身,车身设有安装空间,且车身设有滚轮,滚轮以支撑带动车身运动;托板,托板与车身通过伸缩件连接,且伸缩件的一端与托板之间转动连接,托板与滚轮设于车身的相对两侧;信号处理模块,信号处理模块设于安装空间;控制模块,控制模块与信号处理模块电连接,控制模块与伸缩件电连接,且控制模块设于安装空间;检测装置,检测装置与车身连接,且检测装置与信号处理模块电连接;其中,检测装置检测路面状况,路面状况通过信号处理模块进行处理并输出控制信号至控制模块,控制模块控制伸缩件进行伸缩
自动引导运输车的控制方法和装置.pdf
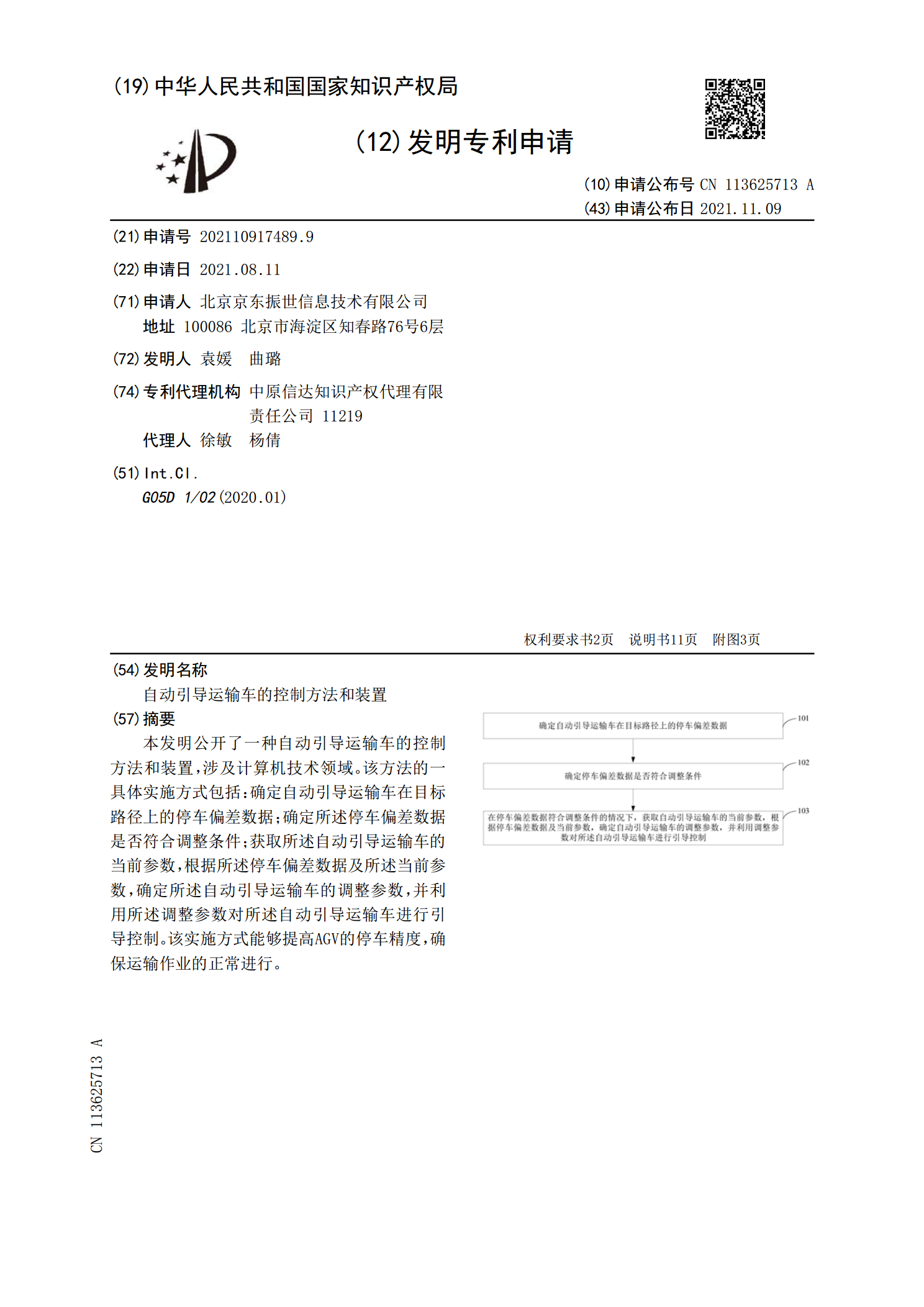
本发明公开了一种自动引导运输车的控制方法和装置,涉及计算机技术领域。该方法的一具体实施方式包括:确定自动引导运输车在目标路径上的停车偏差数据;确定所述停车偏差数据是否符合调整条件;获取所述自动引导运输车的当前参数,根据所述停车偏差数据及所述当前参数,确定所述自动引导运输车的调整参数,并利用所述调整参数对所述自动引导运输车进行引导控制。该实施方式能够提高AGV的停车精度,确保运输作业的正常进行。

自动取杯方法、控制装置及存储介质.pdf
本发明提供一种自动取杯方法、控制装置及存储介质,该方法包括:控制取杯工具移动至预设位置,杯子的上部由自动落杯装置固定,杯子的地面投影落入取杯工具在预设位置时的地面投影范围内,预设位置与杯子的底部的垂直距离小于或等于预设值的位置;控制自动落杯装置松开杯子,以完成取杯,取杯工具的孔径小于杯子的上沿口径。由于杯子在被松开之前,杯子的下部已经位于或接近取杯工具的孔径中,因此,在杯子被松开之后,通过杯子自身锥度自动校正,可以准确落入取杯工具,从而可降低取杯失败概率,提高用户体验。
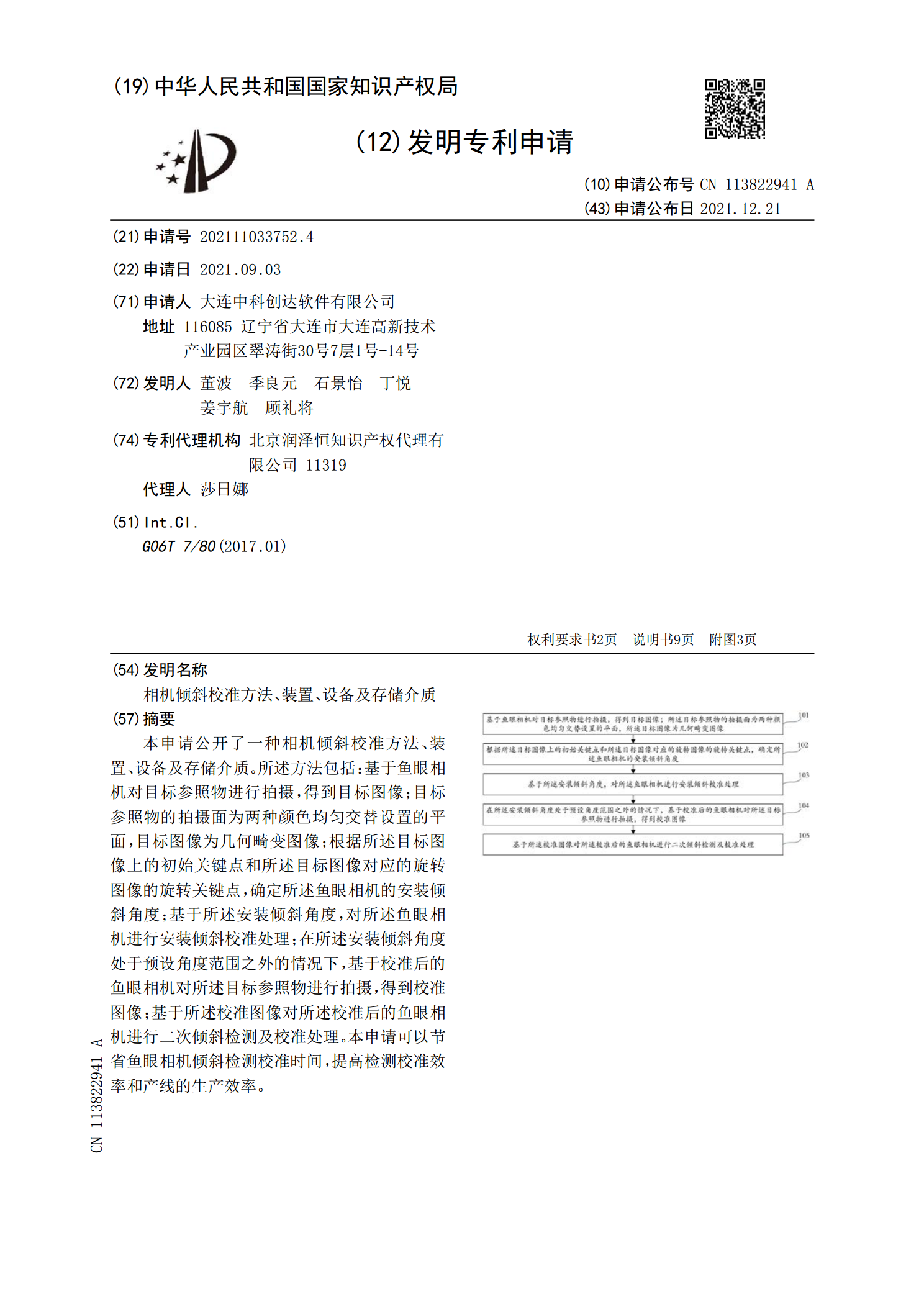
相机倾斜校准方法、装置、设备及存储介质.pdf
本申请公开了一种相机倾斜校准方法、装置、设备及存储介质。所述方法包括:基于鱼眼相机对目标参照物进行拍摄,得到目标图像;目标参照物的拍摄面为两种颜色均匀交替设置的平面,目标图像为几何畸变图像;根据所述目标图像上的初始关键点和所述目标图像对应的旋转图像的旋转关键点,确定所述鱼眼相机的安装倾斜角度;基于所述安装倾斜角度,对所述鱼眼相机进行安装倾斜校准处理;在所述安装倾斜角度处于预设角度范围之外的情况下,基于校准后的鱼眼相机对所述目标参照物进行拍摄,得到校准图像;基于所述校准图像对所述校准后的鱼眼相机进行二次倾斜
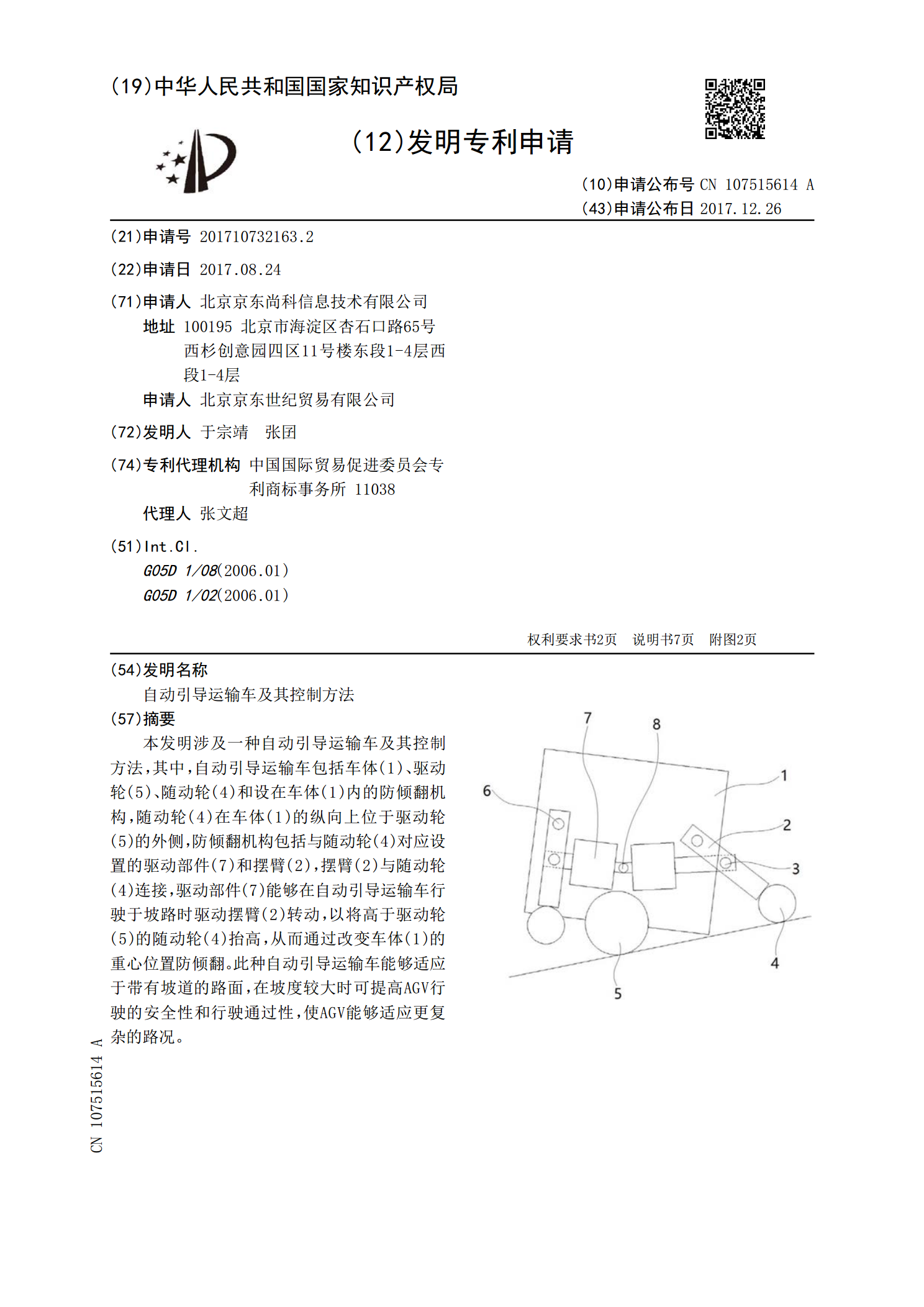
自动引导运输车及其控制方法.pdf
本发明涉及一种自动引导运输车及其控制方法,其中,自动引导运输车包括车体(1)、驱动轮(5)、随动轮(4)和设在车体(1)内的防倾翻机构,随动轮(4)在车体(1)的纵向上位于驱动轮(5)的外侧,防倾翻机构包括与随动轮(4)对应设置的驱动部件(7)和摆臂(2),摆臂(2)与随动轮(4)连接,驱动部件(7)能够在自动引导运输车行驶于坡路时驱动摆臂(2)转动,以将高于驱动轮(5)的随动轮(4)抬高,从而通过改变车体(1)的重心位置防倾翻。此种自动引导运输车能够适应于带有坡道的路面,在坡度较大时可提高AGV行驶的安