
半主动悬架控制方法及控制装置、存储介质及车辆.pdf

努力****恨风

1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

半主动悬架控制方法及控制装置、存储介质及车辆.pdf
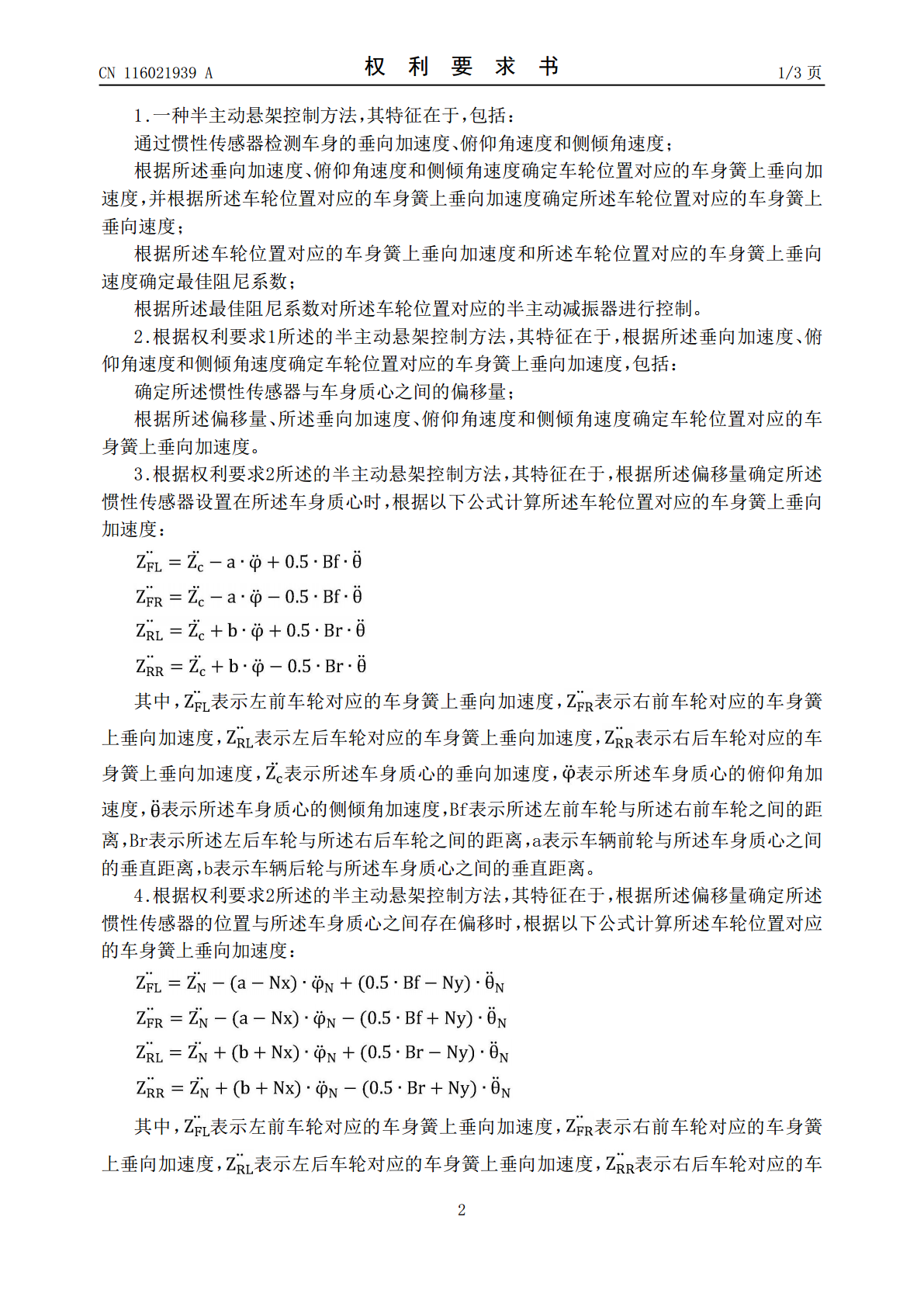
本发明公开了一种半主动悬架控制方法及控制装置、存储介质及车辆,其中,半主动悬架控制方法包括以下步骤:通过惯性传感器检测车身的垂向加速度、俯仰角速度和侧倾角速度;根据垂向加速度、俯仰角速度和侧倾角速度确定车轮位置对应的车身簧上垂向加速度,并根据车身簧上垂向加速度确定车轮位置对应的车身簧上垂向速度;根据车轮位置对应的车身簧上垂向加速度和车轮位置对应的车身簧上垂向速度确定最佳阻尼系数;根据最佳阻尼系数对车轮位置对应的半主动减振器进行控制。由此,本实施例能够保证车辆操纵稳定性的同时,提高车辆的乘坐舒适性,使车辆能

车辆及其主动悬架的控制方法、装置以及存储介质.pdf
本发明公开了一种车辆及其主动悬架的控制方法、装置以及存储介质。其中,车辆主动悬架的控制方法包括:确定车辆的轮胎类型,其中,轮胎类型包括正常轮、欠压轮和破损轮;根据轮胎类型确定高度补偿量;根据高度补偿量控制主动悬架进行高度补偿。该车辆主动悬架的控制方法,可以实现车辆出现轮胎欠压和/或破损时依然可以正常行驶。
空气悬架的控制方法、装置、车辆及存储介质.pdf
本申请公开了一种空气悬架的控制方法、装置、车辆及存储介质,属于车辆控制技术领域。应用于具有空气悬架装置的车辆,该方法包括:获取车辆在行驶过程中的实时导航信息,根据实时导航信息,获取空气悬架装置的目标高度;控制车辆的空气悬架装置移动至目标高度处。车载终端通过获取实时导航信息,基于行驶道路信息获取空气悬架装置的目标高度,使得空气悬架装置调整的高度与实际行驶道路信息相关,调整后的空气悬架装置的高度更加符合当前行车的需求,使得空气悬架装置调节的适应性更广,灵活性更高。
车辆悬架控制方法、装置、存储介质及设备.pdf
本发明公开了一种车辆悬架控制方法、装置、存储介质及设备,涉及车辆控制领域,主要为解决目前车辆悬架控制中,悬架高度控制方法单一以及调节方法单一的问题。该方法包括:获取车辆位置信息,所述车辆位置信息包括车辆所处城市;基于所述车辆位置信息确定当前的悬架控制需求信息;基于所述悬架控制需求信息对所述车辆进行悬架控制。本发明用于车辆悬架控制过程。
空气悬架装置的控制方法、装置、车辆及存储介质.pdf
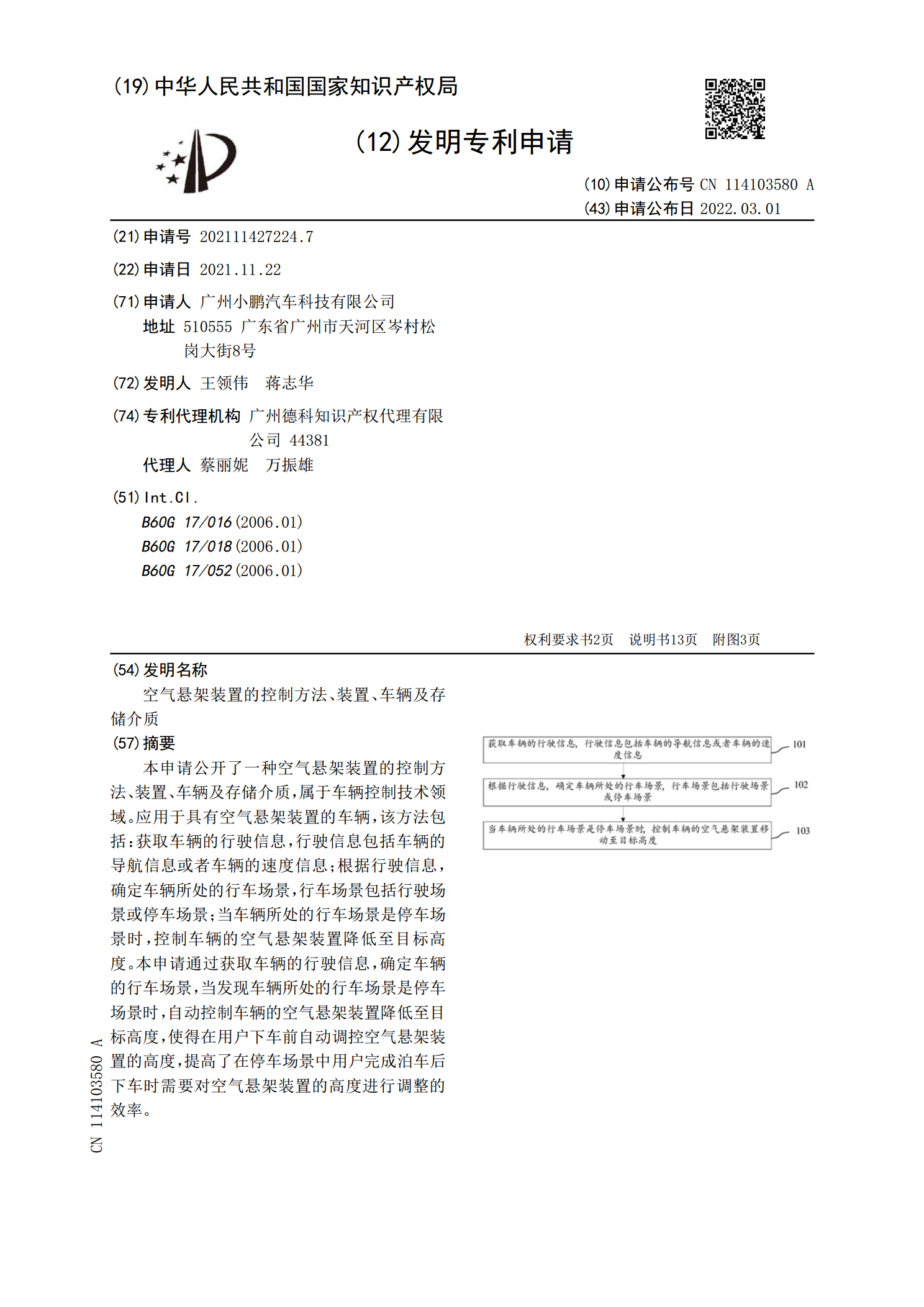
本申请公开了一种空气悬架装置的控制方法、装置、车辆及存储介质,属于车辆控制技术领域。应用于具有空气悬架装置的车辆,该方法包括:获取车辆的行驶信息,行驶信息包括车辆的导航信息或者车辆的速度信息;根据行驶信息,确定车辆所处的行车场景,行车场景包括行驶场景或停车场景;当车辆所处的行车场景是停车场景时,控制车辆的空气悬架装置降低至目标高度。本申请通过获取车辆的行驶信息,确定车辆的行车场景,当发现车辆所处的行车场景是停车场景时,自动控制车辆的空气悬架装置降低至目标高度,使得在用户下车前自动调控空气悬架装置的高度,提