
多维力传感器的在轨高精度标定装置及标定方法.pdf

努力****星驰


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多维力传感器的在轨高精度标定装置及标定方法.pdf
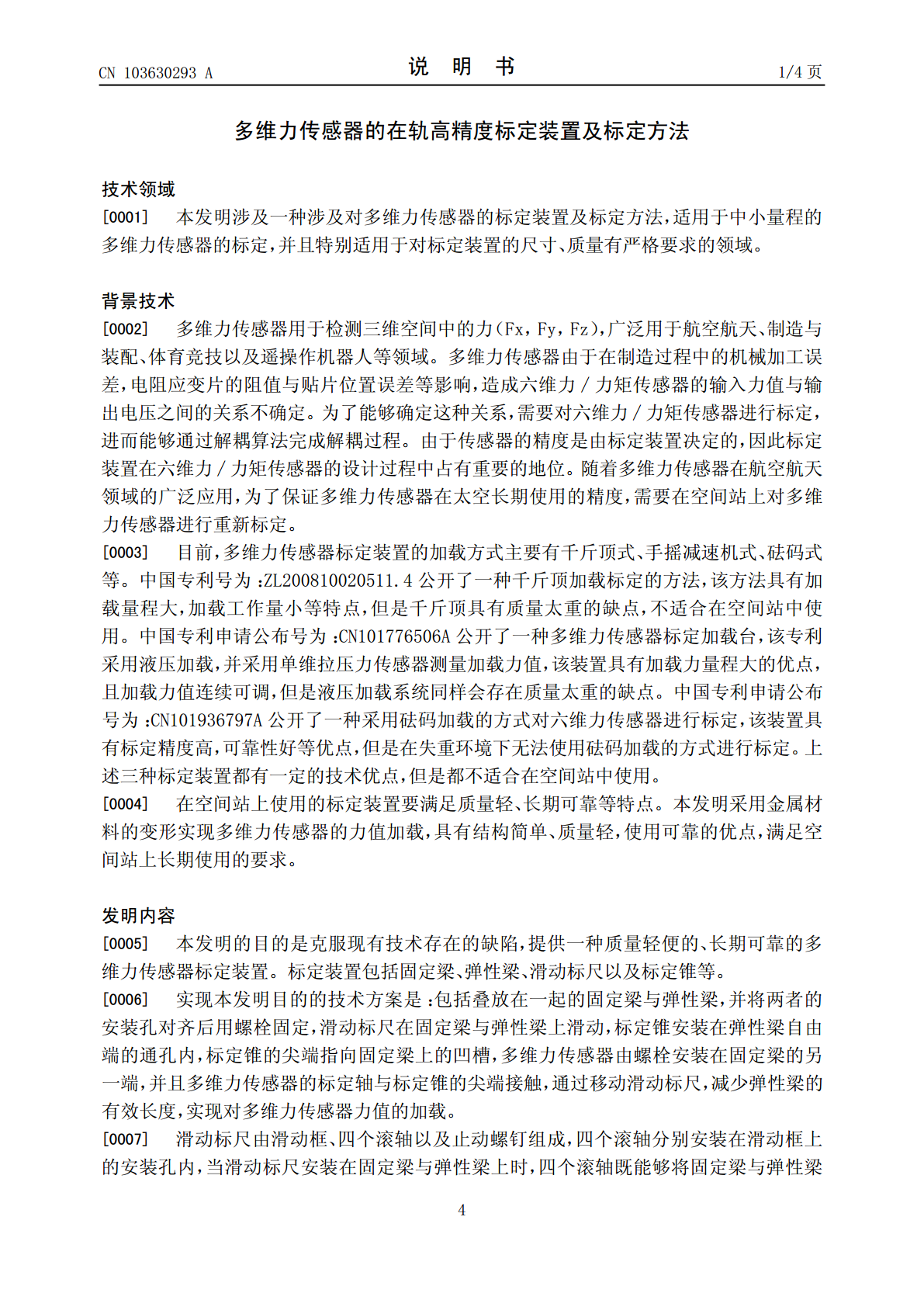
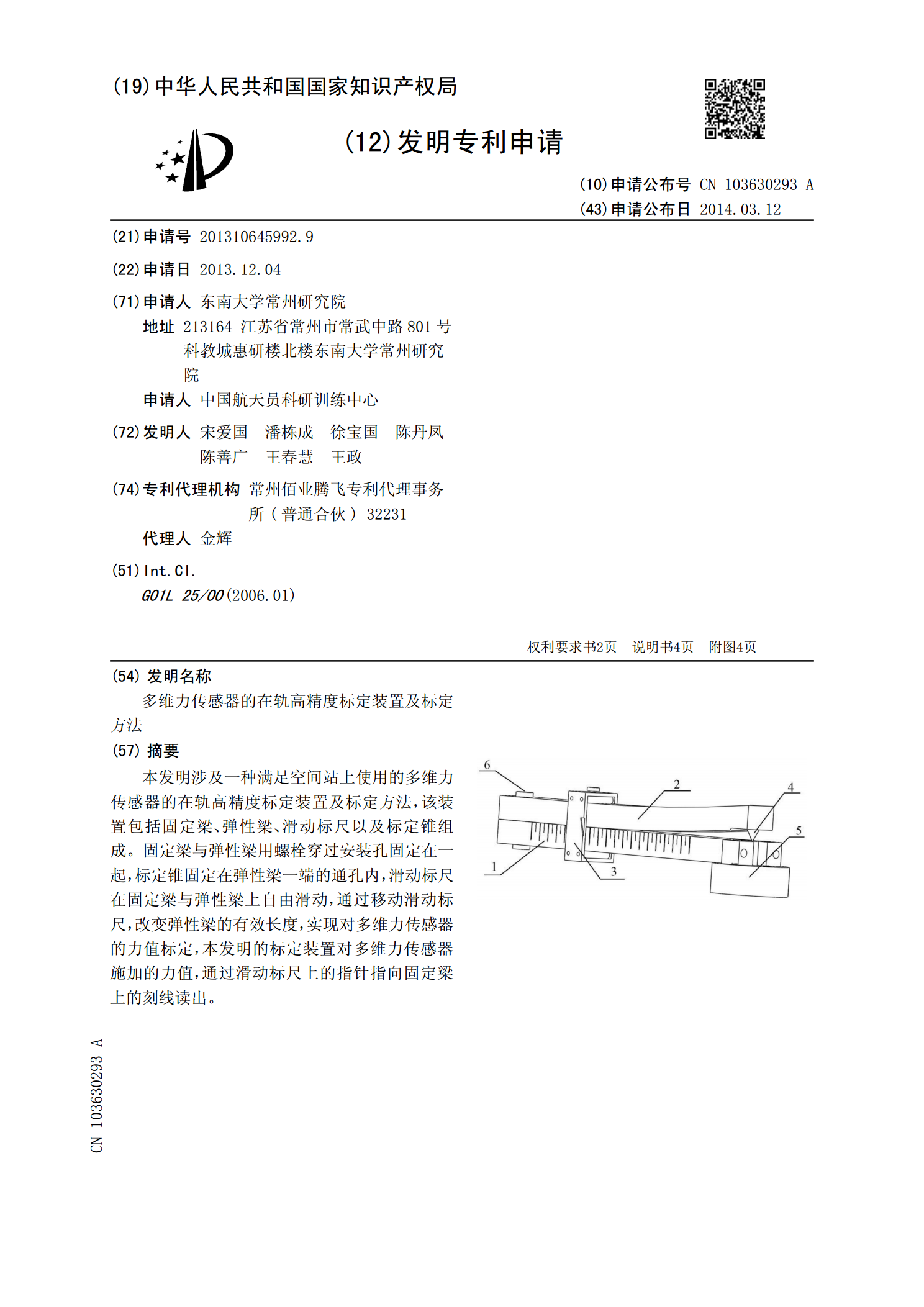
本发明涉及一种满足空间站上使用的多维力传感器的在轨高精度标定装置及标定方法,该装置包括固定梁、弹性梁、滑动标尺以及标定锥组成。固定梁与弹性梁用螺栓穿过安装孔固定在一起,标定锥固定在弹性梁一端的通孔内,滑动标尺在固定梁与弹性梁上自由滑动,通过移动滑动标尺,改变弹性梁的有效长度,实现对多维力传感器的力值标定,本发明的标定装置对多维力传感器施加的力值,通过滑动标尺上的指针指向固定梁上的刻线读出。

一种多维力传感器动态标定装置及标定方法.pdf
本发明提供了一种多维力传感器动态标定装置及标定方法。该标定装置包括:标定台;载于标定台的传感器标定固件;载于标定台的动态载荷发生机构;以及载于动态载荷发生机构的动态载荷加载机构。本发明能够解决现有多维力传感器动态标定实验形式过于单一、不成熟的问题,同时消除现有技术中无法保证敲击点位置、敲击方向、敲击力度大小的缺陷。
广义力加载多维测力台标定装置及其标定方法.pdf
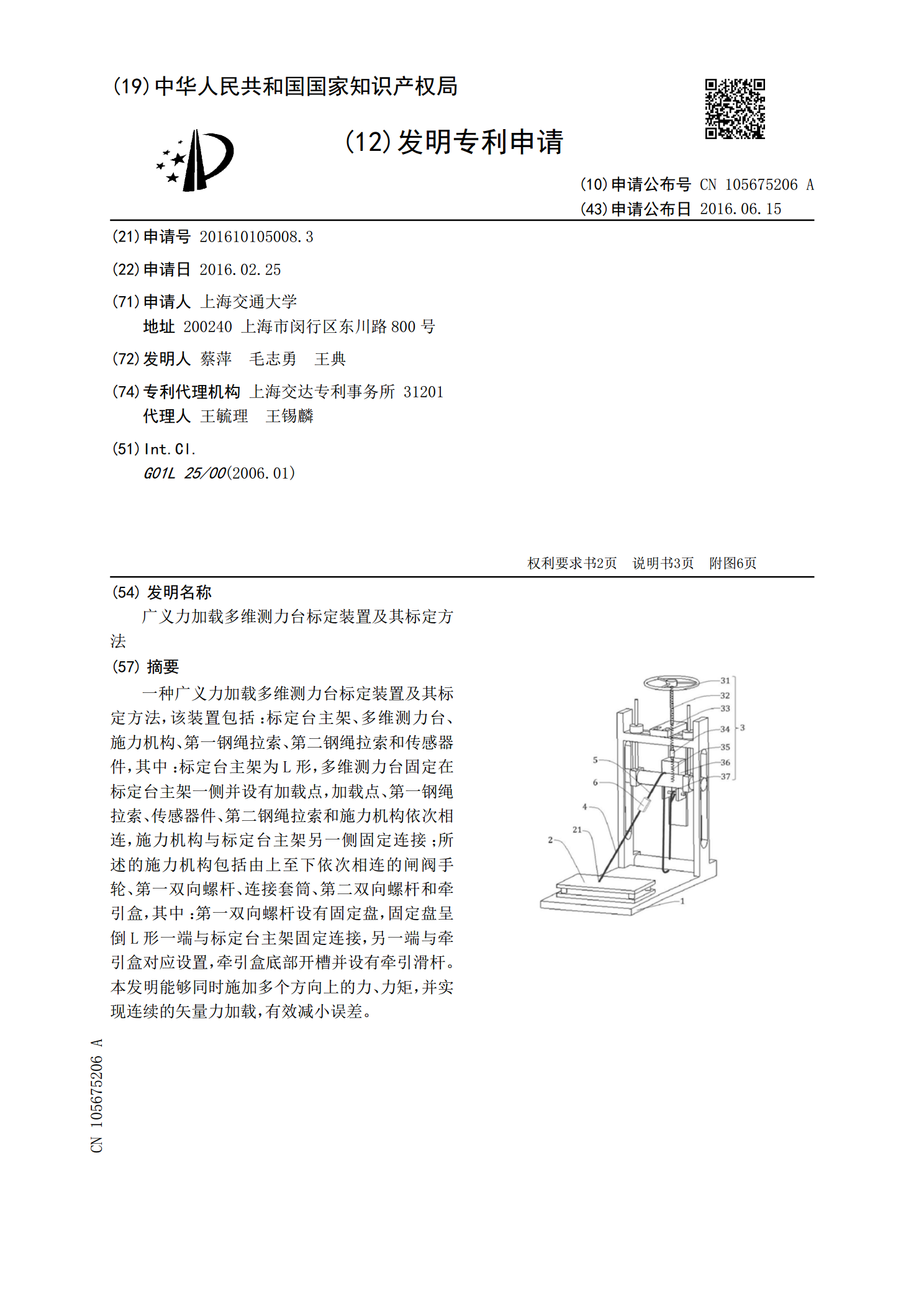
一种广义力加载多维测力台标定装置及其标定方法,该装置包括:标定台主架、多维测力台、施力机构、第一钢绳拉索、第二钢绳拉索和传感器件,其中:标定台主架为L形,多维测力台固定在标定台主架一侧并设有加载点,加载点、第一钢绳拉索、传感器件、第二钢绳拉索和施力机构依次相连,施力机构与标定台主架另一侧固定连接;所述的施力机构包括由上至下依次相连的闸阀手轮、第一双向螺杆、连接套筒、第二双向螺杆和牵引盒,其中:第一双向螺杆设有固定盘,固定盘呈倒L形一端与标定台主架固定连接,另一端与牵引盒对应设置,牵引盒底部开槽并设有牵引滑
六维力传感器标定装置及其标定方法.pdf
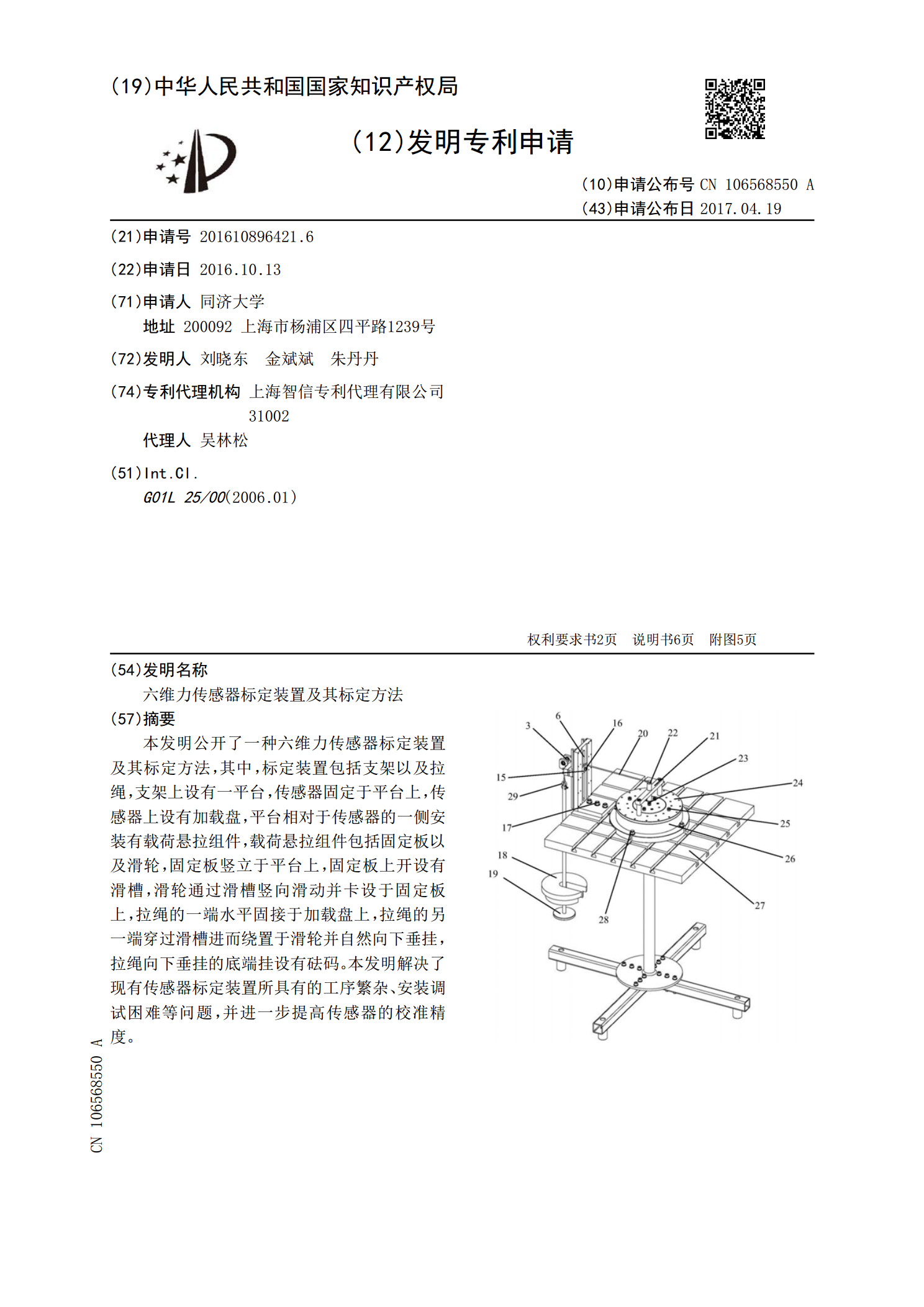
本发明公开了一种六维力传感器标定装置及其标定方法,其中,标定装置包括支架以及拉绳,支架上设有一平台,传感器固定于平台上,传感器上设有加载盘,平台相对于传感器的一侧安装有载荷悬拉组件,载荷悬拉组件包括固定板以及滑轮,固定板竖立于平台上,固定板上开设有滑槽,滑轮通过滑槽竖向滑动并卡设于固定板上,拉绳的一端水平固接于加载盘上,拉绳的另一端穿过滑槽进而绕置于滑轮并自然向下垂挂,拉绳向下垂挂的底端挂设有砝码。本发明解决了现有传感器标定装置所具有的工序繁杂、安装调试困难等问题,并进一步提高传感器的校准精度。

一种六维力传感器标定装置及其标定方法.pdf
一种六维力传感器标定装置及其标定方法。该装置包括标定工作台、带两个滑轮轴的支架、分别在两个滑轮轴上的平行滑轮和高端滑轮、和绕过该滑轮的载荷施加绳。在标定工作台上固定安装有标定调节板,通过预紧螺钉与该标定调节板连接的传感器预紧板、与该传感器预紧板固定连接的载荷定位板,待标定六维力传感器以预紧状态被夹持安装在标定调节板和传感器预紧板之间。载荷定位板有五个或三个均位于同一水平面上的,呈十字形或L形的载荷施力点。本发明具有结构相对简单、紧凑,成本低,通用性较好,且操作简单的优点;最突出的优点是,除能够对六维力传感