
广义力加载多维测力台标定装置及其标定方法.pdf

是向****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
广义力加载多维测力台标定装置及其标定方法.pdf
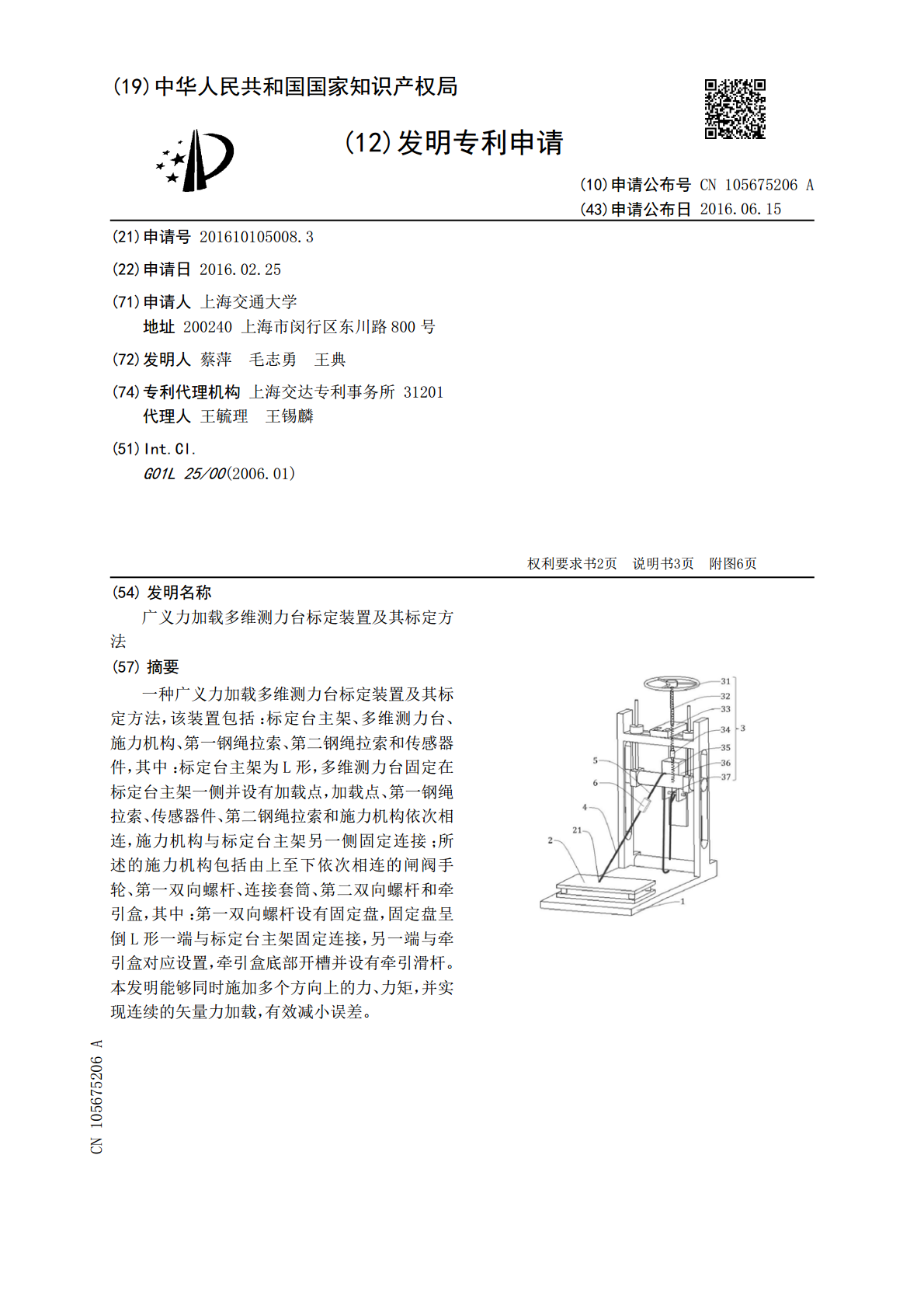
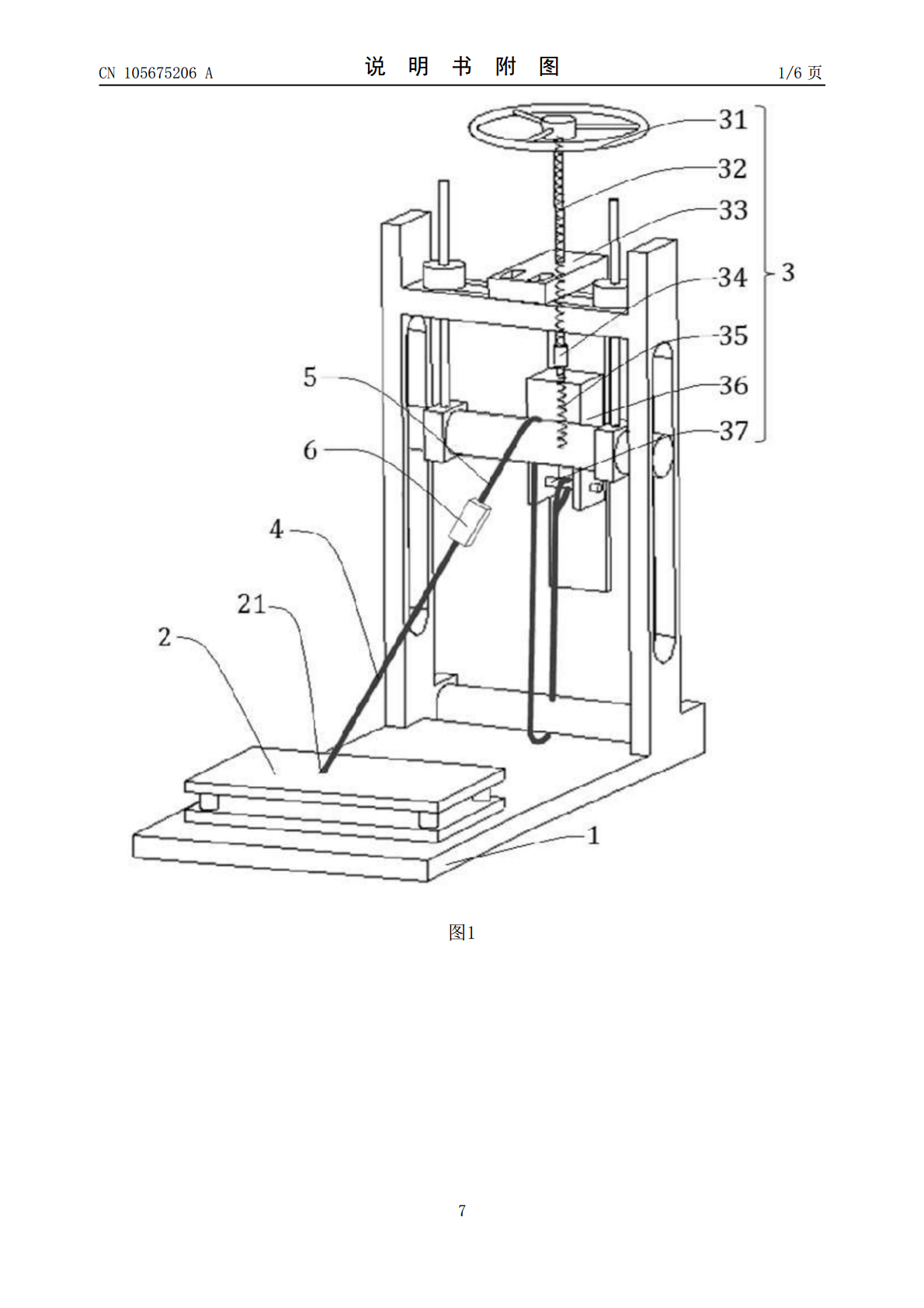
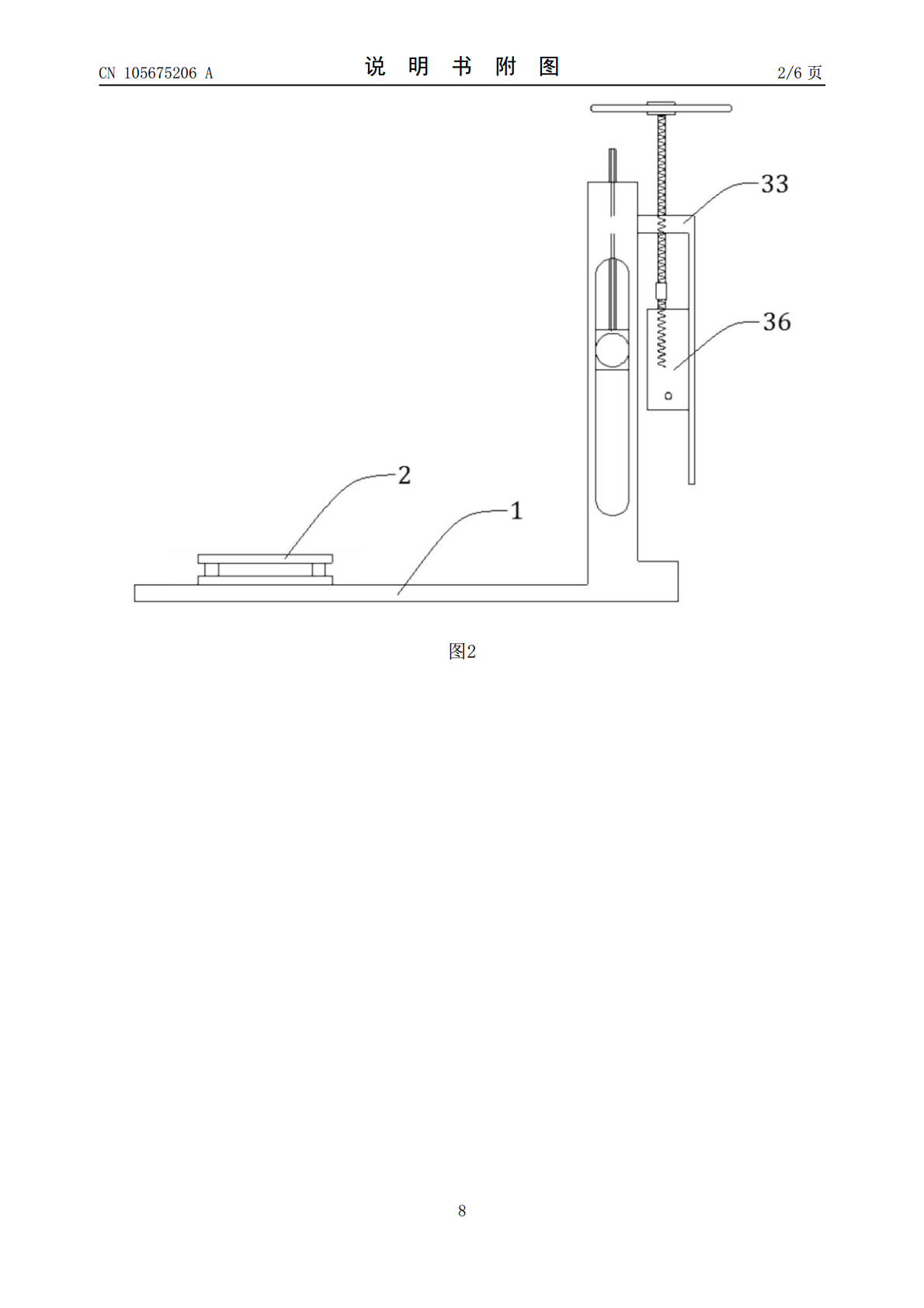
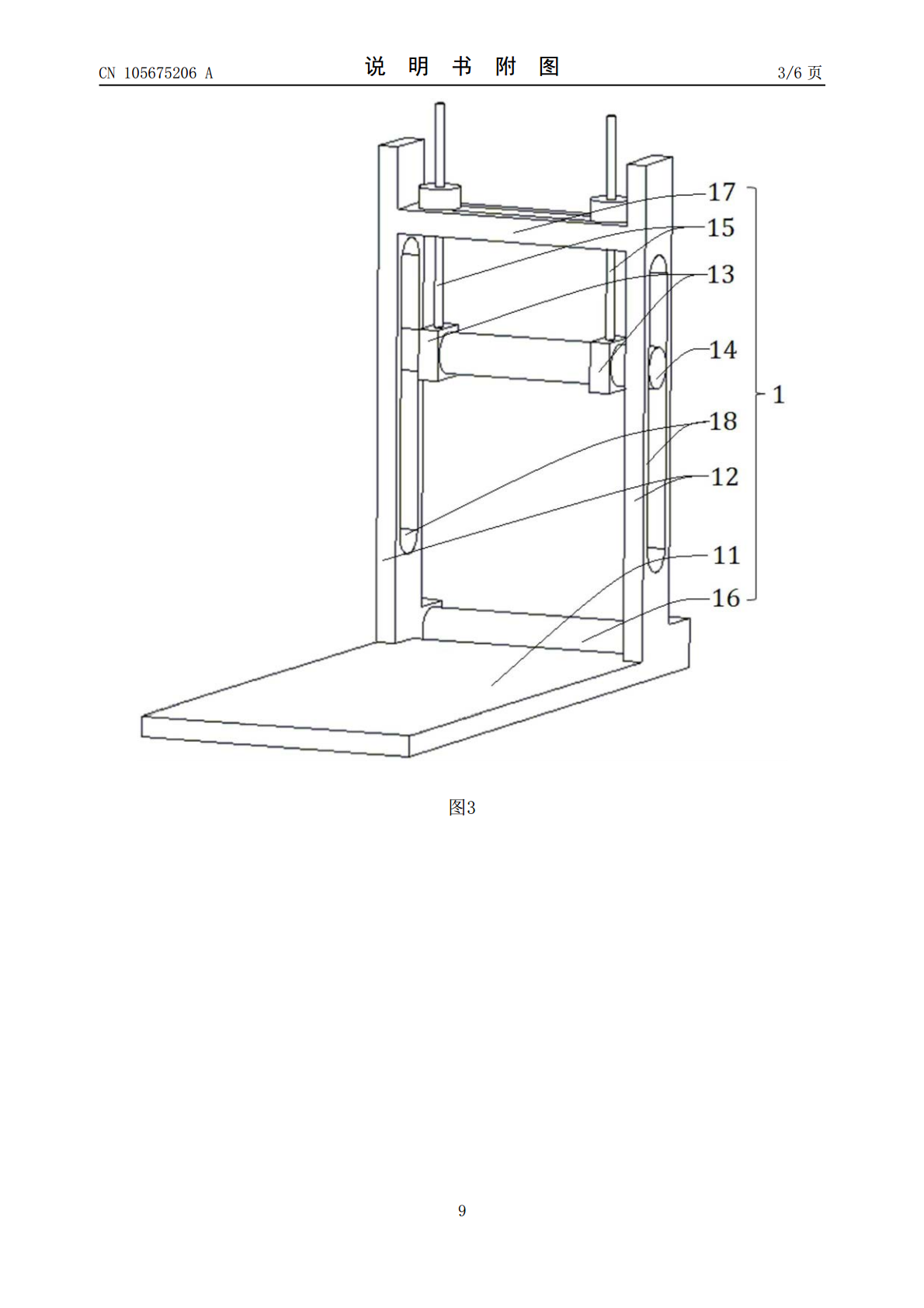
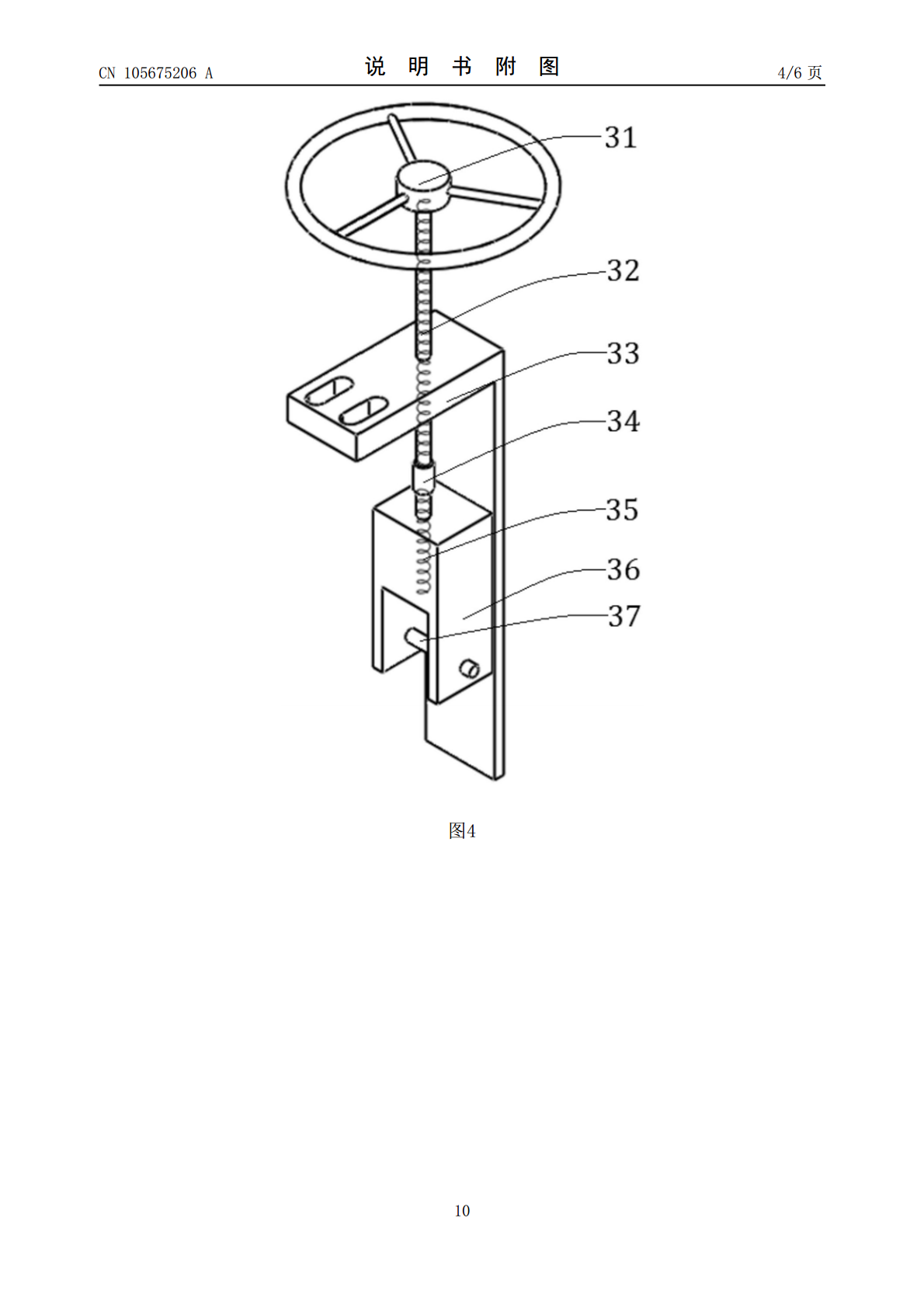
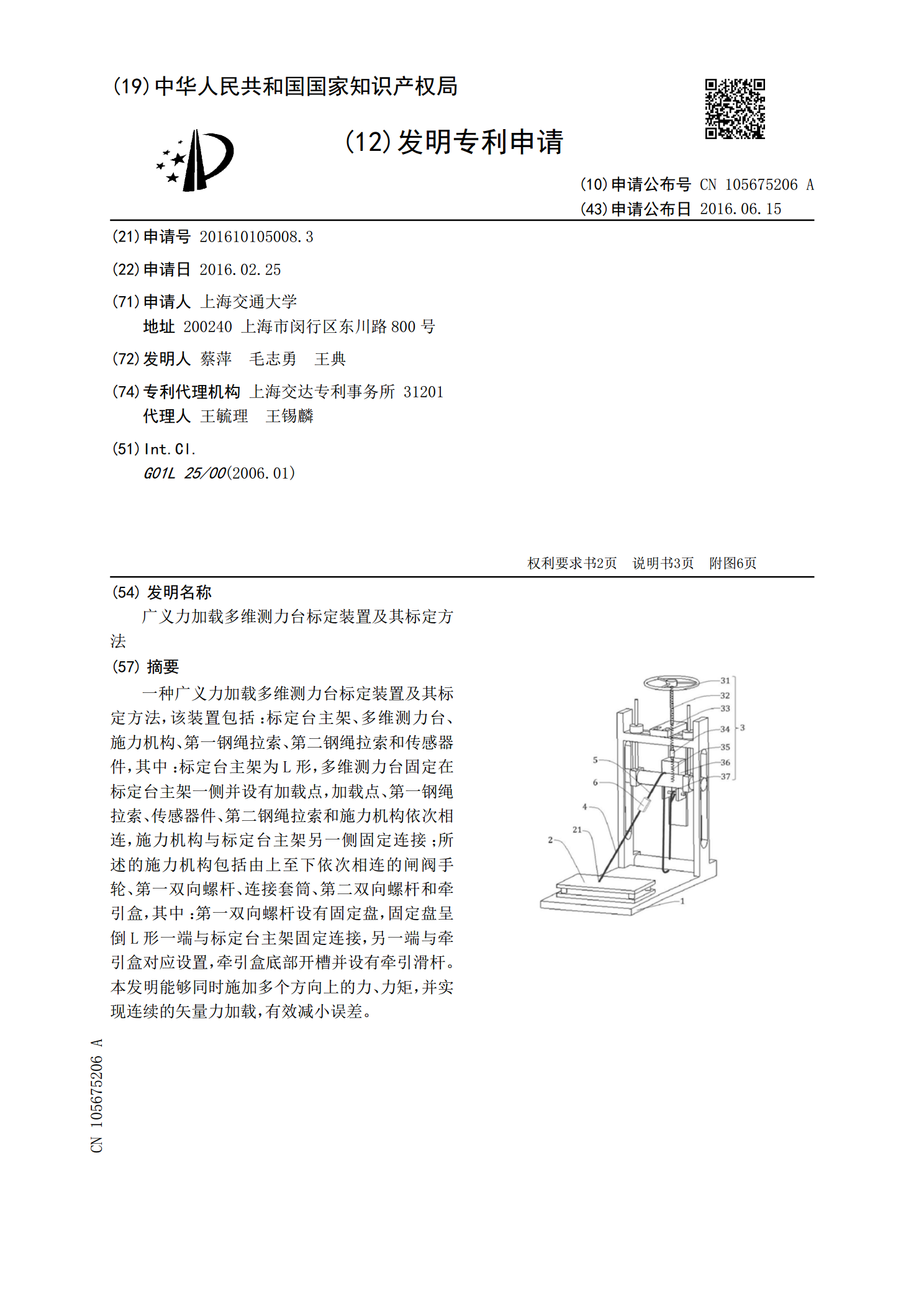
一种广义力加载多维测力台标定装置及其标定方法,该装置包括:标定台主架、多维测力台、施力机构、第一钢绳拉索、第二钢绳拉索和传感器件,其中:标定台主架为L形,多维测力台固定在标定台主架一侧并设有加载点,加载点、第一钢绳拉索、传感器件、第二钢绳拉索和施力机构依次相连,施力机构与标定台主架另一侧固定连接;所述的施力机构包括由上至下依次相连的闸阀手轮、第一双向螺杆、连接套筒、第二双向螺杆和牵引盒,其中:第一双向螺杆设有固定盘,固定盘呈倒L形一端与标定台主架固定连接,另一端与牵引盒对应设置,牵引盒底部开槽并设有牵引滑

三维测力平台标定装置.pdf
本发明涉及一种三维测力平台标定装置,旨在克服现有的力标定装置不能根据使用需要,对平板式三维测力平台和凸台式三维测力平台进行三个方向同时力标定的缺陷,提供对三维测力平台测力传感器进行全面同时正交标定的装置。该装置可对这两种外形不同的三维测力平台,进行标定。该装置由砝码托盘装配体、反力板与轮辐式压力传感器装配体和三维测力平台标定装置基础平台装配体组成。砝码托盘装配体放置在三维测力平台上,反力板与轮辐式压力传感器装配体与三维测力平台连接,螺栓固定,三维测力平台与三维测力平台标定装置基础平台装配体连接,螺栓固定。

一种可调工作台式力加载装置及其标定方法.pdf
本发明公开了一种可调工作台式力加载装置及其标定方法,包括支撑台,阶梯工作台架,螺旋杆,支撑立柱,可调动工作台机构,水平加载机构,铅垂加载机构,同步带,铅垂滑动架,蜗轮蜗杆机构,摇杆,升降螺母,刻度尺,由于采用的是可调动工作台机构,使得加载工作板能实现垂直方向和水平方向的移动,为标定复杂外形或不同尺寸的被标定件提供了方便,由于铅垂加载机构只能垂直方向移动,水平加载机构固定不动,减少了因移动方向过多造成加载机构的复杂性,提高了加载大量程载荷时加载机构的强度;采用L型标定板在加载工作板的不同固定方式,使得加载工

可测力电动伺服加载装置.pdf
本发明公开了可测力电动伺服加载装置,其包括混合直线步进电机、电机基座、电机支撑立柱、丝母、压力传感器、外壳、连接螺柱、作动杆与弹性触头。安装有导向键和非标压力弹簧的作动杆插入外壳内,作动杆上端和外壳的中直径圆孔相接触,作动杆的杆部和外壳下端小直径圆孔相接触。弹性触头安装在作动杆下端的盲孔内并用夹紧螺钉固定。压力传感器下端通过连接螺柱和作动杆上端连接,压力传感器上端面与丝母下端面接触。丝母的凸台与外壳大直径圆孔内壁凹槽配装,外壳上端面四角处的螺纹孔连接电机支撑立柱下端,电机支撑立柱的上端和电机基座固定连接。
一种用于测力试验准备的加载装置及测试方法.pdf
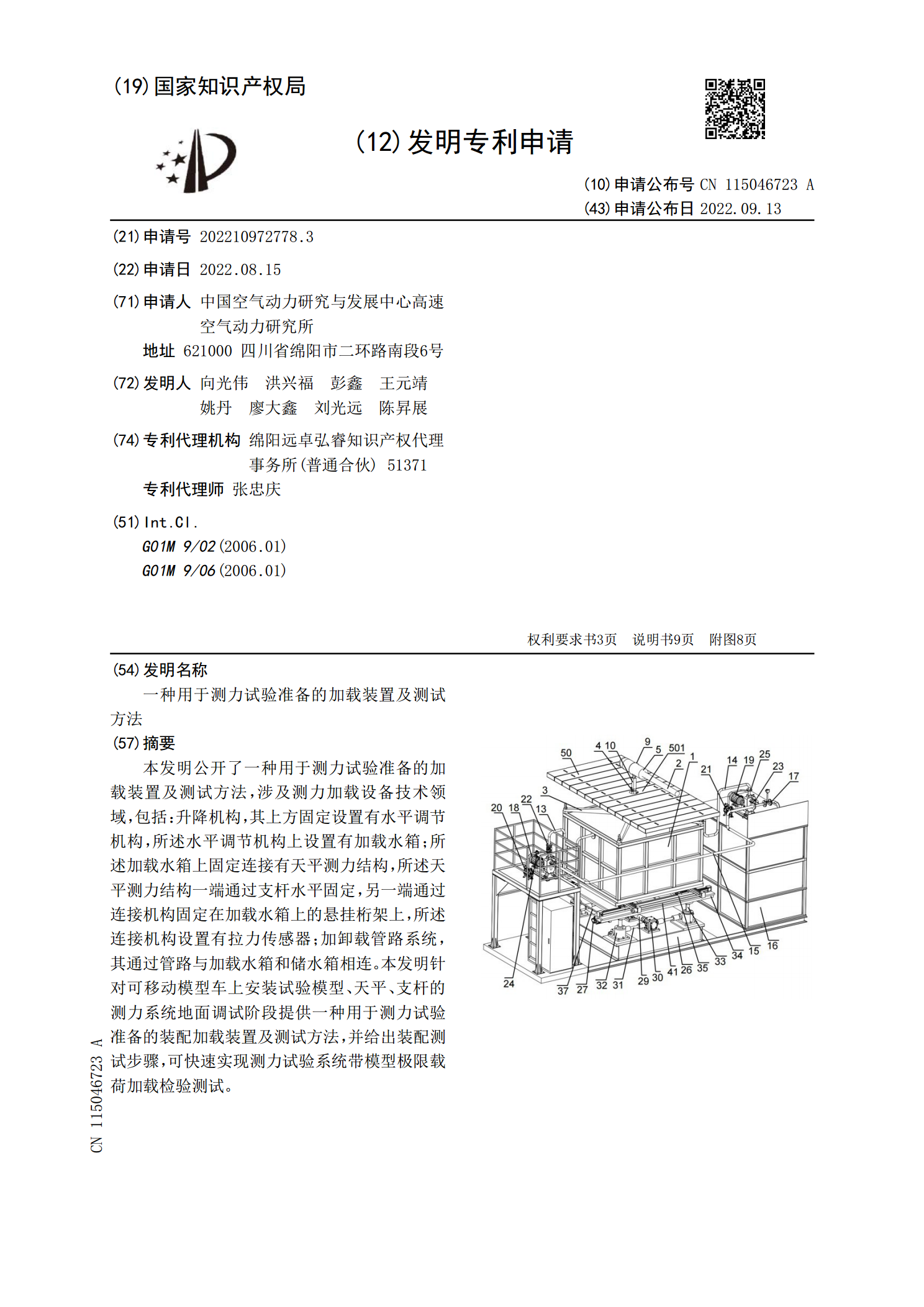
本发明公开了一种用于测力试验准备的加载装置及测试方法,涉及测力加载设备技术领域,包括:升降机构,其上方固定设置有水平调节机构,所述水平调节机构上设置有加载水箱;所述加载水箱上固定连接有天平测力结构,所述天平测力结构一端通过支杆水平固定,另一端通过连接机构固定在加载水箱上的悬挂桁架上,所述连接机构设置有拉力传感器;加卸载管路系统,其通过管路与加载水箱和储水箱相连。本发明针对可移动模型车上安装试验模型、天平、支杆的测力系统地面调试阶段提供一种用于测力试验准备的装配加载装置及测试方法,并给出装配测试步骤,可快速