
一种新型平面关节型机器人结构.pdf

海昌****姐淑

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种新型平面关节型机器人结构.pdf
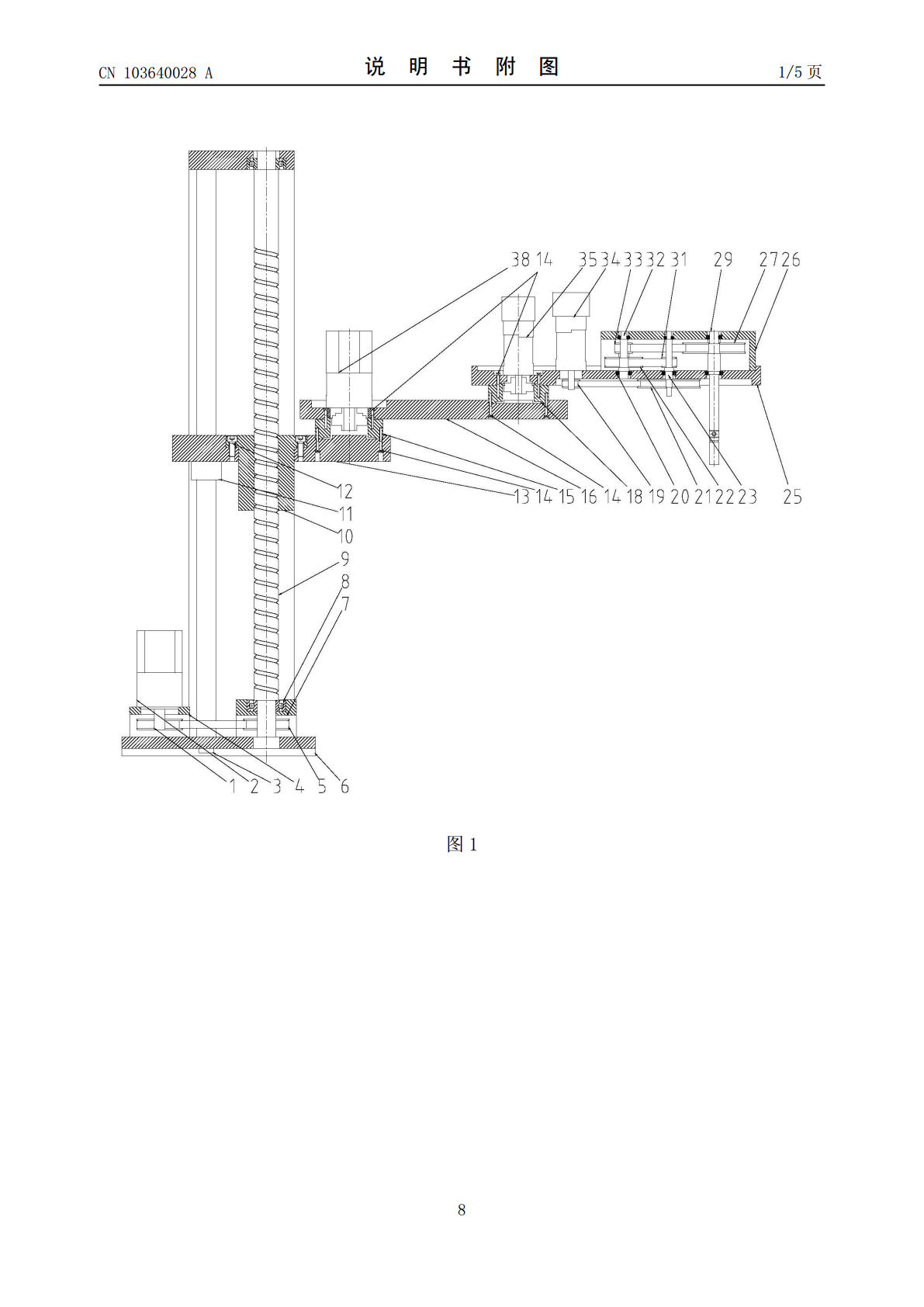
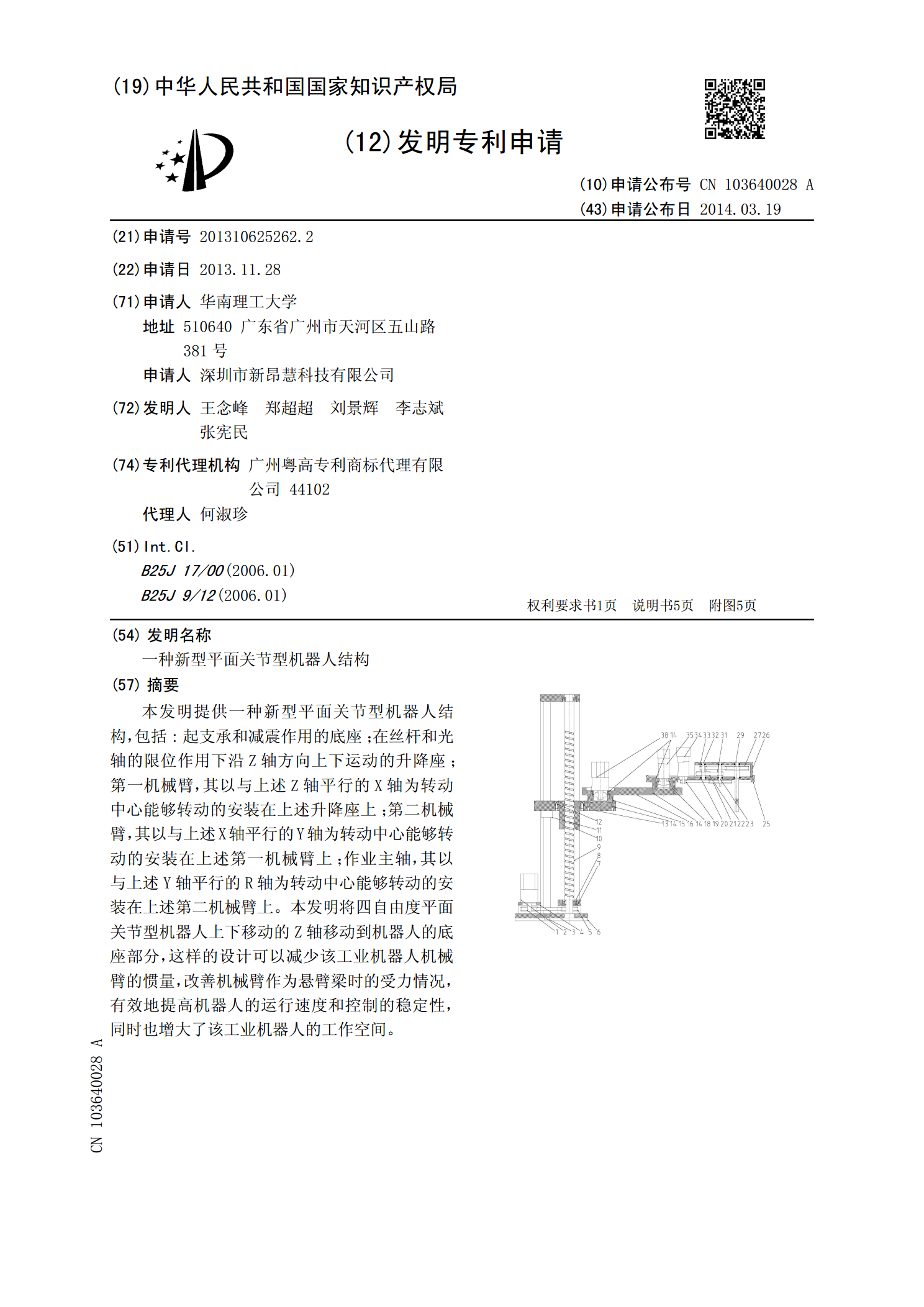
本发明提供一种新型平面关节型机器人结构,包括:起支承和减震作用的底座;在丝杆和光轴的限位作用下沿Z轴方向上下运动的升降座;第一机械臂,其以与上述Z轴平行的X轴为转动中心能够转动的安装在上述升降座上;第二机械臂,其以与上述X轴平行的Y轴为转动中心能够转动的安装在上述第一机械臂上;作业主轴,其以与上述Y轴平行的R轴为转动中心能够转动的安装在上述第二机械臂上。本发明将四自由度平面关节型机器人上下移动的Z轴移动到机器人的底座部分,这样的设计可以减少该工业机器人机械臂的惯量,改善机械臂作为悬臂梁时的受力情况,有效地

平面关节型机器人结构设计.docx
毕业设计(论文)题目:平面关节型机器人的结构设计姓名:指导教师:专业:摘要平面关节型机械手采用两个回转关节和一个移动关节;两个回转关节控制前后左右运动,而移动关节则实现上下运动,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状[11]。能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
一种平面关节型机器人手腕传动部件.pdf
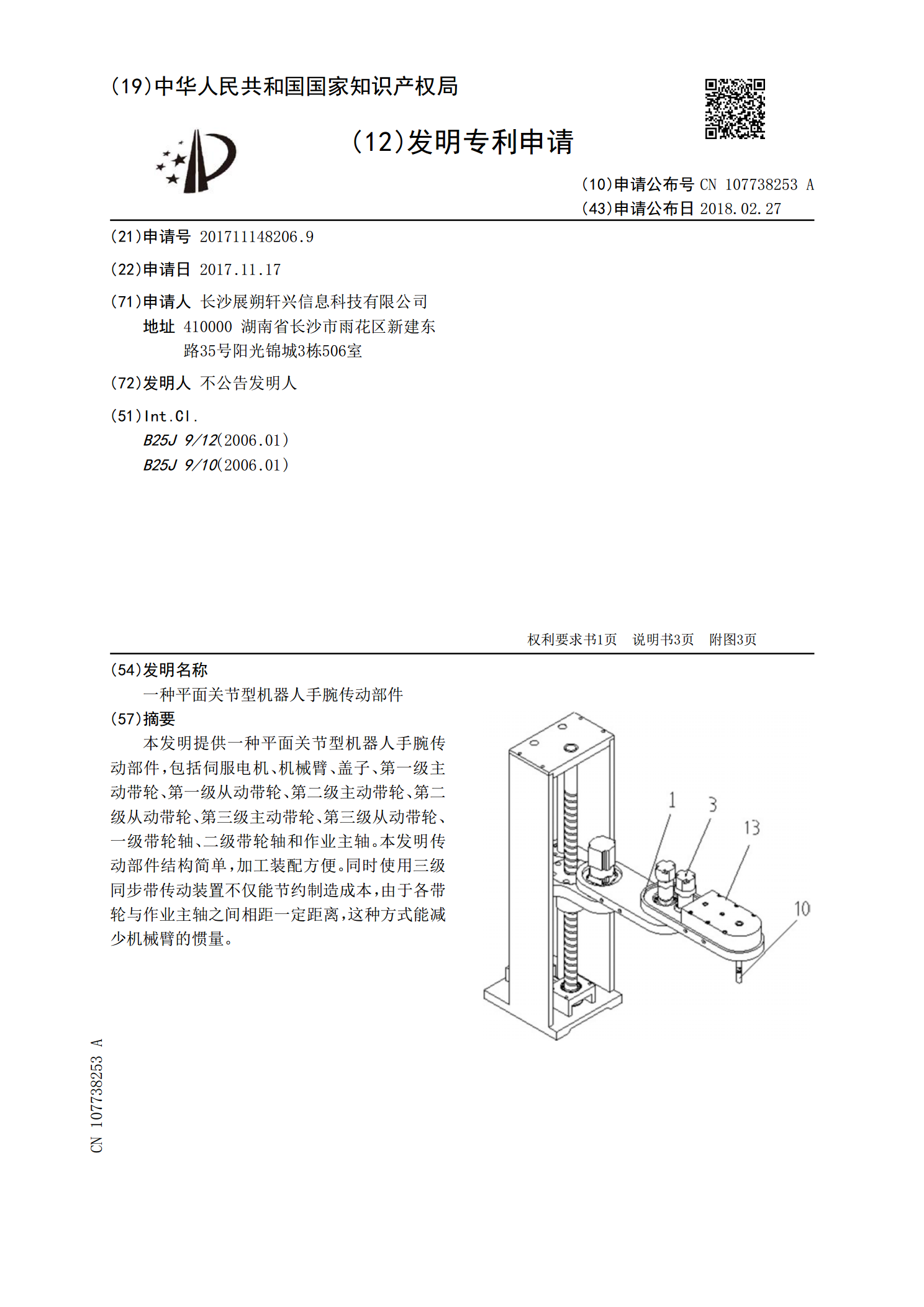
本发明提供一种平面关节型机器人手腕传动部件,包括伺服电机、机械臂、盖子、第一级主动带轮、第一级从动带轮、第二级主动带轮、第二级从动带轮、第三级主动带轮、第三级从动带轮、一级带轮轴、二级带轮轴和作业主轴。本发明传动部件结构简单,加工装配方便。同时使用三级同步带传动装置不仅能节约制造成本,由于各带轮与作业主轴之间相距一定距离,这种方式能减少机械臂的惯量。
一种平面关节型机器人手腕传动部件.pdf
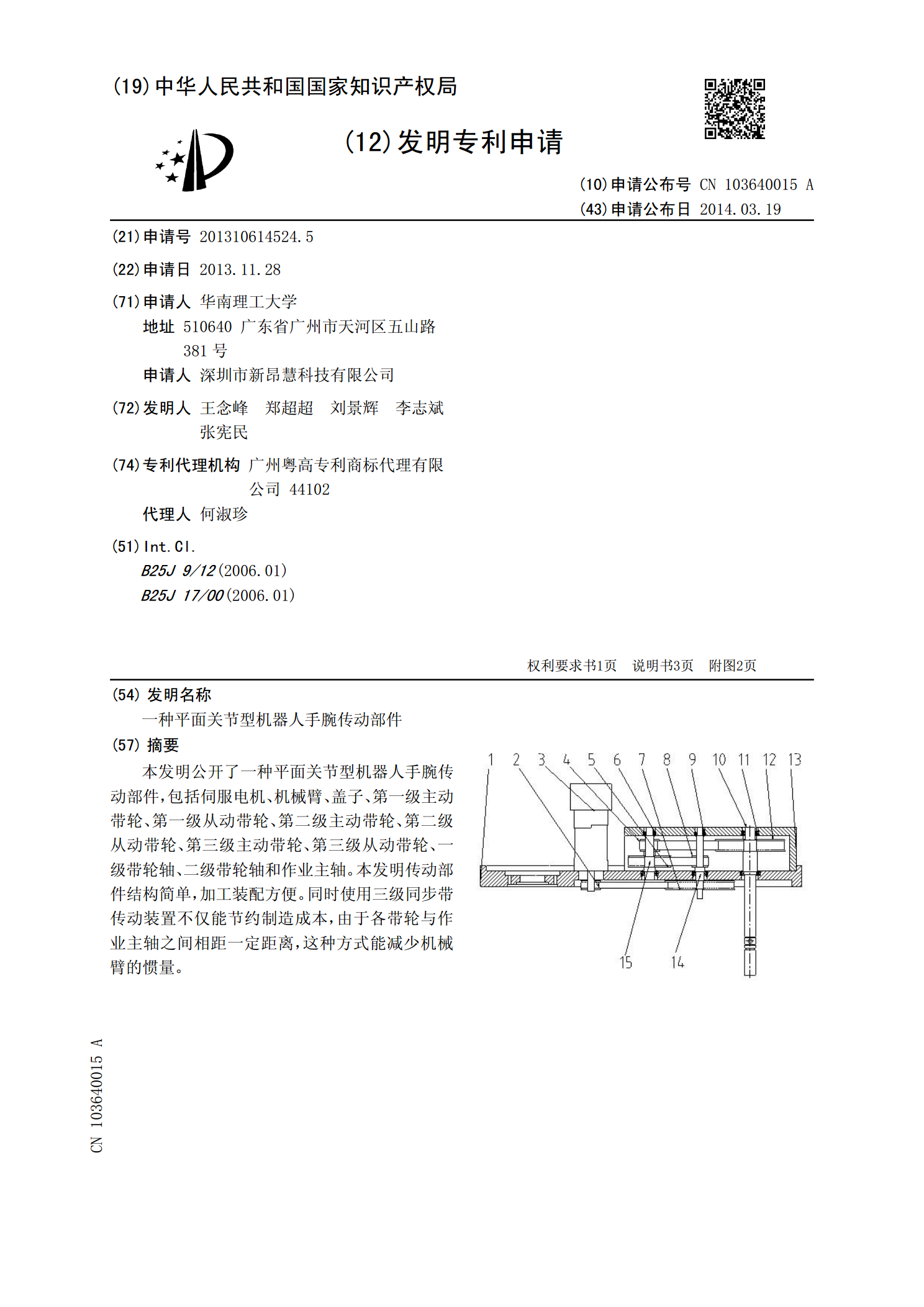
本发明公开了一种平面关节型机器人手腕传动部件,包括伺服电机、机械臂、盖子、第一级主动带轮、第一级从动带轮、第二级主动带轮、第二级从动带轮、第三级主动带轮、第三级从动带轮、一级带轮轴、二级带轮轴和作业主轴。本发明传动部件结构简单,加工装配方便。同时使用三级同步带传动装置不仅能节约制造成本,由于各带轮与作业主轴之间相距一定距离,这种方式能减少机械臂的惯量。
一种新型腿足机器人关节结构.pdf
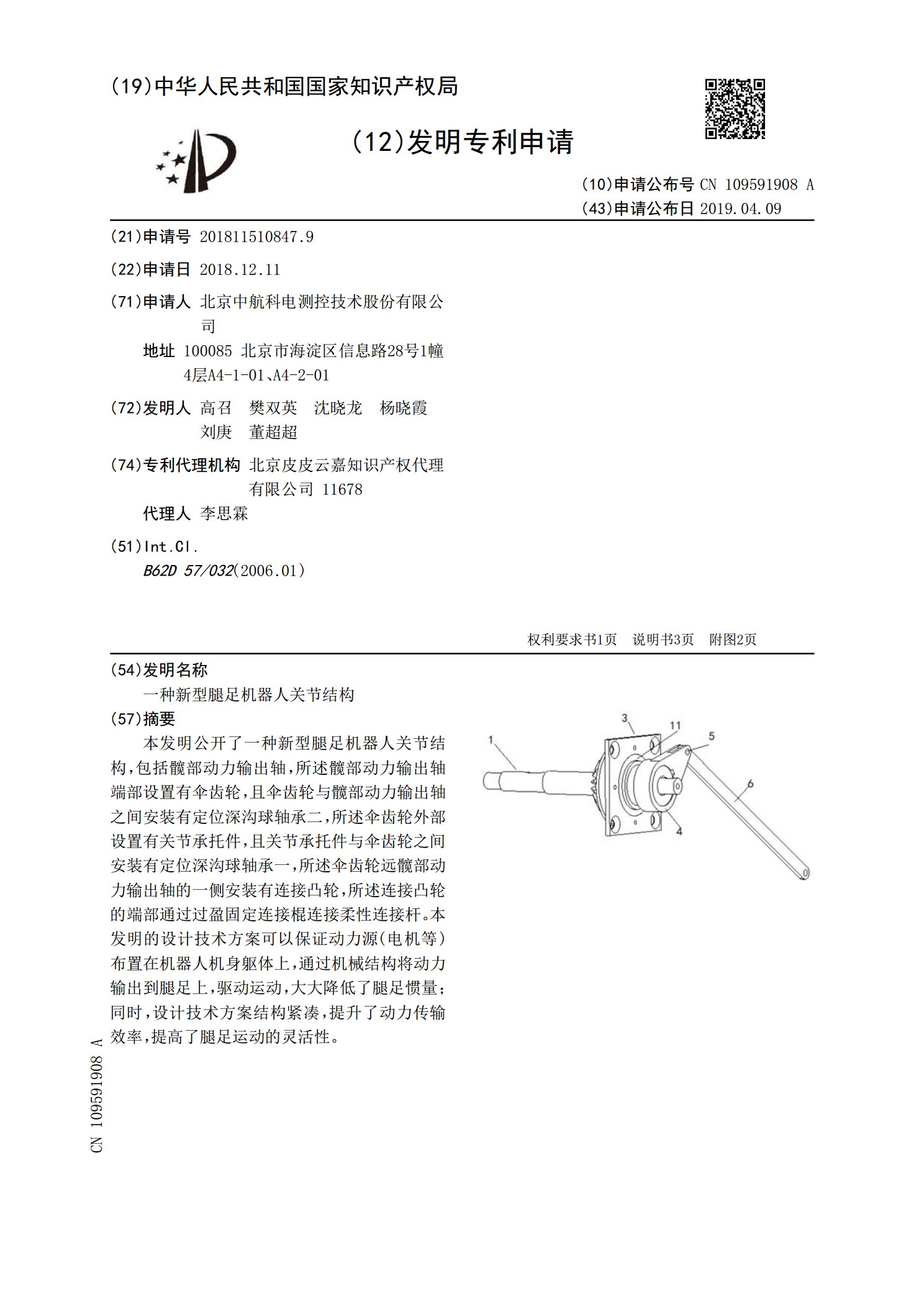
本发明公开了一种新型腿足机器人关节结构,包括髋部动力输出轴,所述髋部动力输出轴端部设置有伞齿轮,且伞齿轮与髋部动力输出轴之间安装有定位深沟球轴承二,所述伞齿轮外部设置有关节承托件,且关节承托件与伞齿轮之间安装有定位深沟球轴承一,所述伞齿轮远髋部动力输出轴的一侧安装有连接凸轮,所述连接凸轮的端部通过过盈固定连接棍连接柔性连接杆。本发明的设计技术方案可以保证动力源(电机等)布置在机器人机身躯体上,通过机械结构将动力输出到腿足上,驱动运动,大大降低了腿足惯量;同时,设计技术方案结构紧凑,提升了动力传输效率,提高