
一种平面关节型机器人手腕传动部件.pdf

小寄****淑k


1/7
2/7
3/7

4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种平面关节型机器人手腕传动部件.pdf
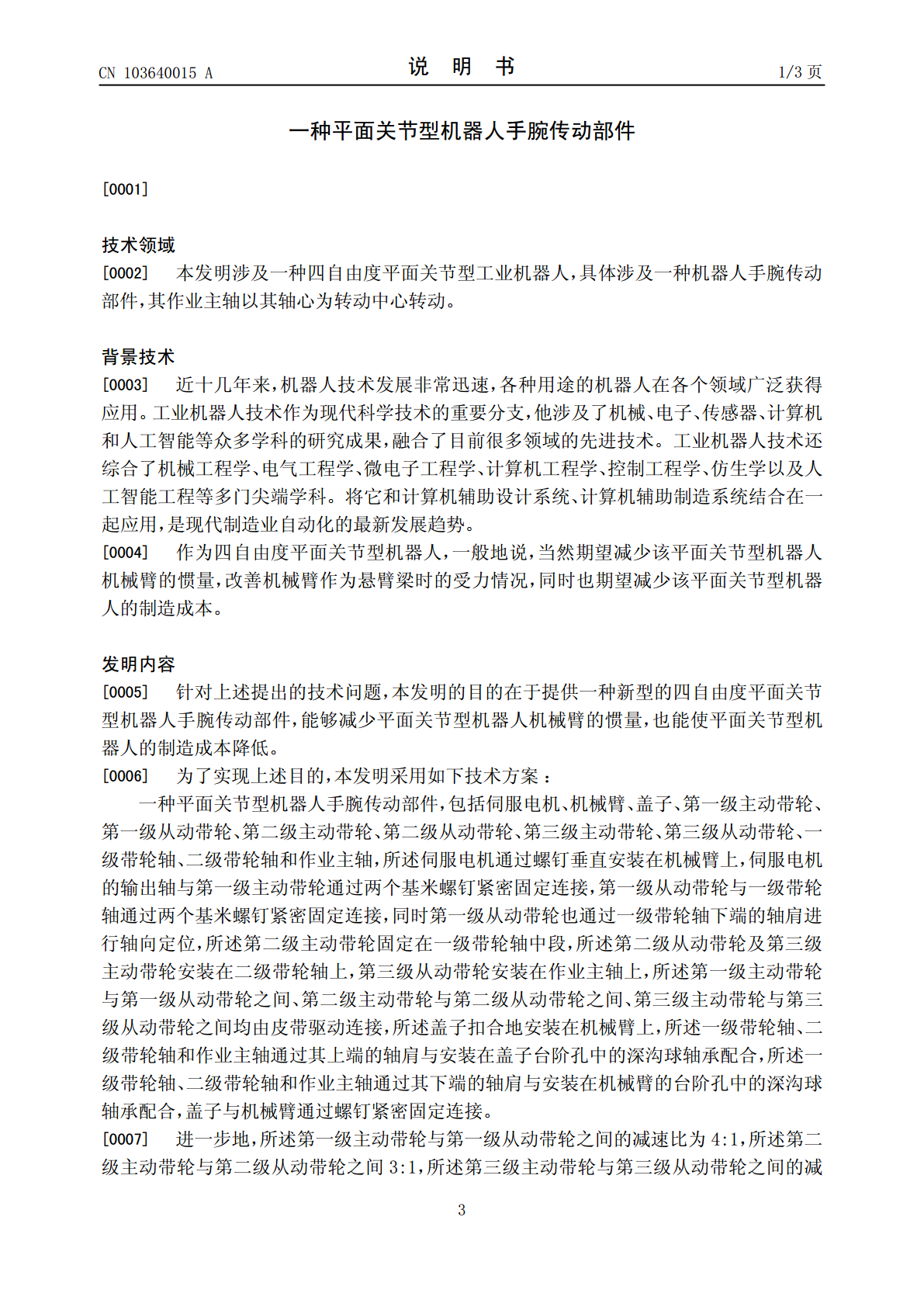
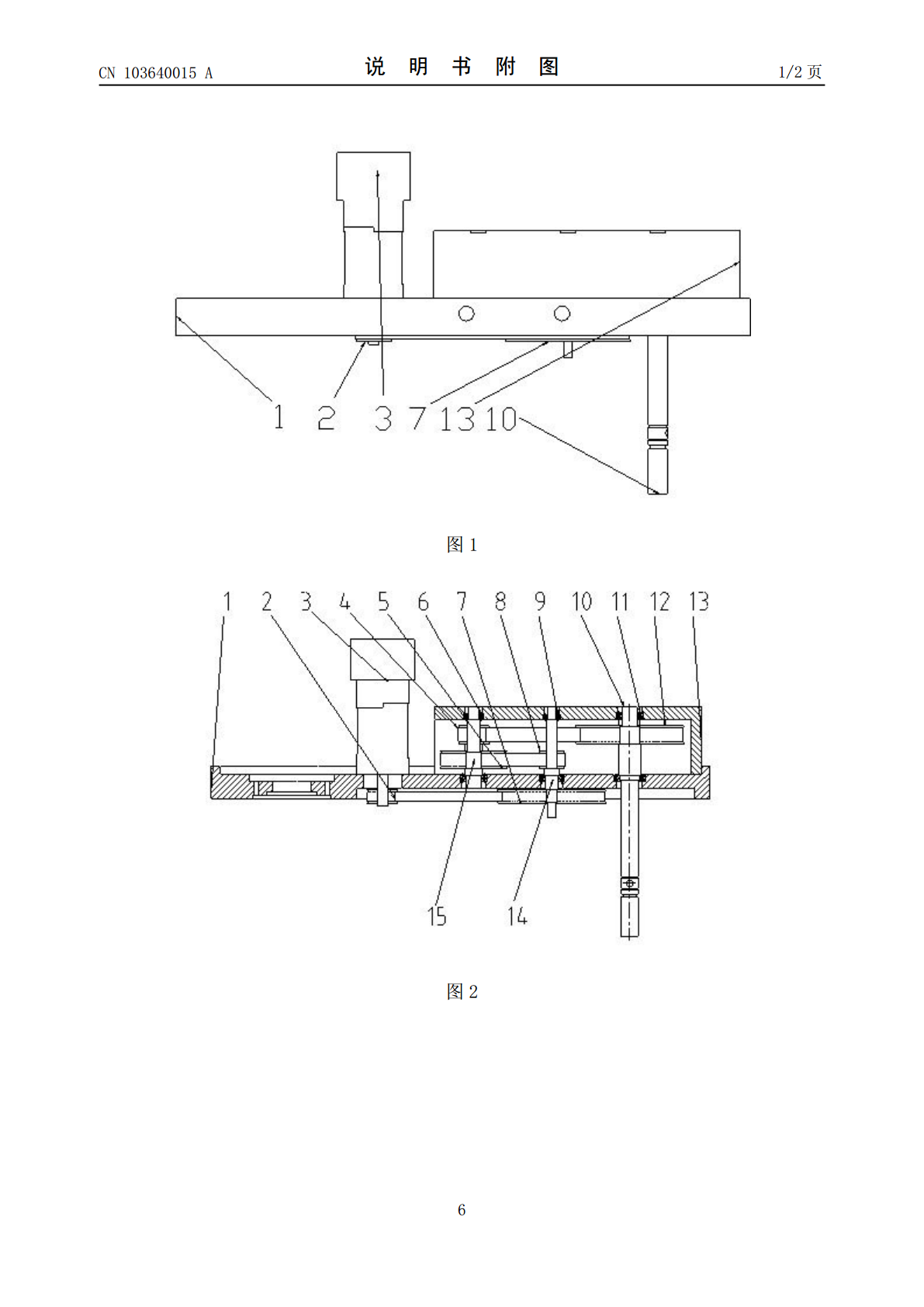
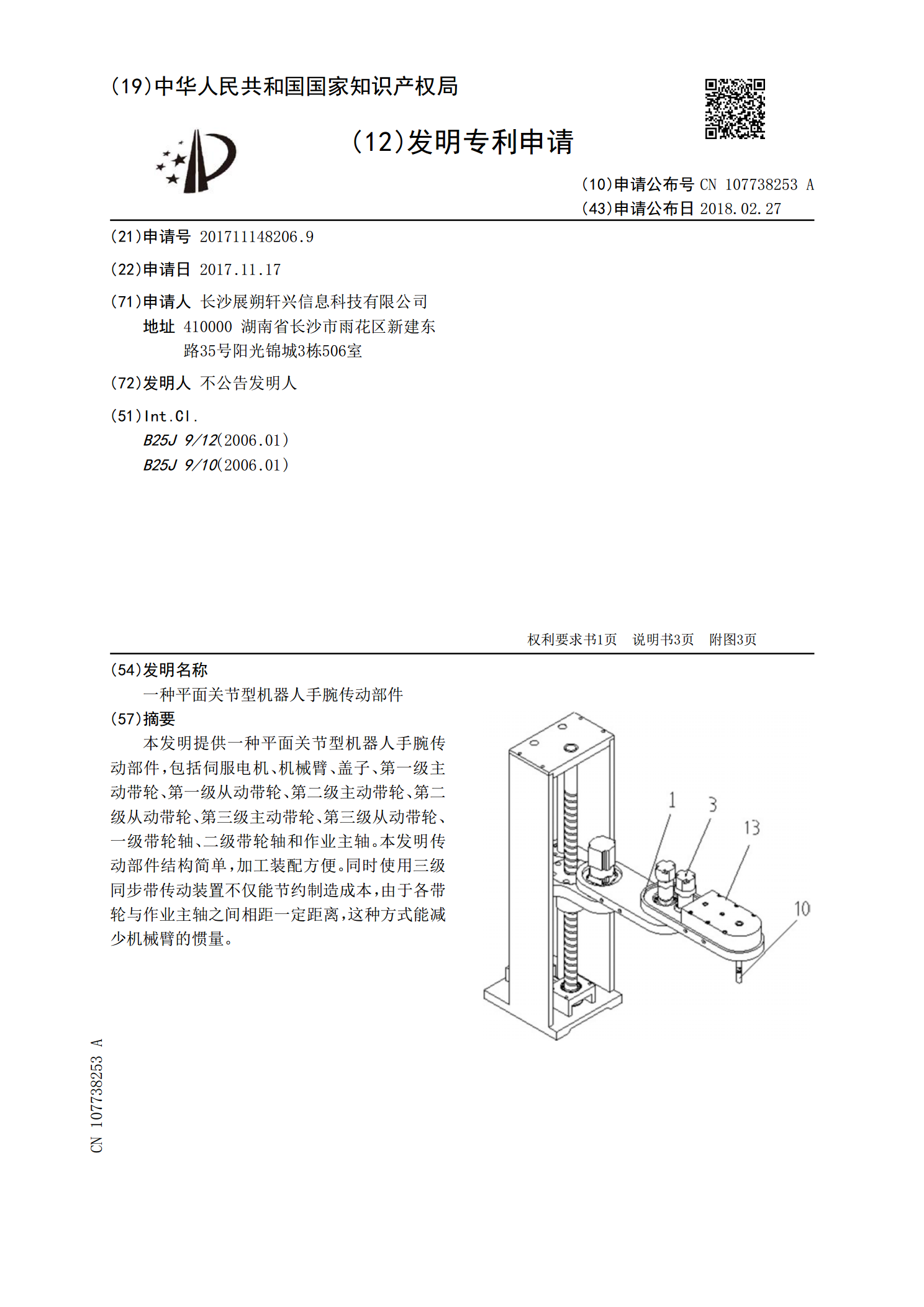
本发明提供一种平面关节型机器人手腕传动部件,包括伺服电机、机械臂、盖子、第一级主动带轮、第一级从动带轮、第二级主动带轮、第二级从动带轮、第三级主动带轮、第三级从动带轮、一级带轮轴、二级带轮轴和作业主轴。本发明传动部件结构简单,加工装配方便。同时使用三级同步带传动装置不仅能节约制造成本,由于各带轮与作业主轴之间相距一定距离,这种方式能减少机械臂的惯量。
一种平面关节型机器人手腕传动部件.pdf
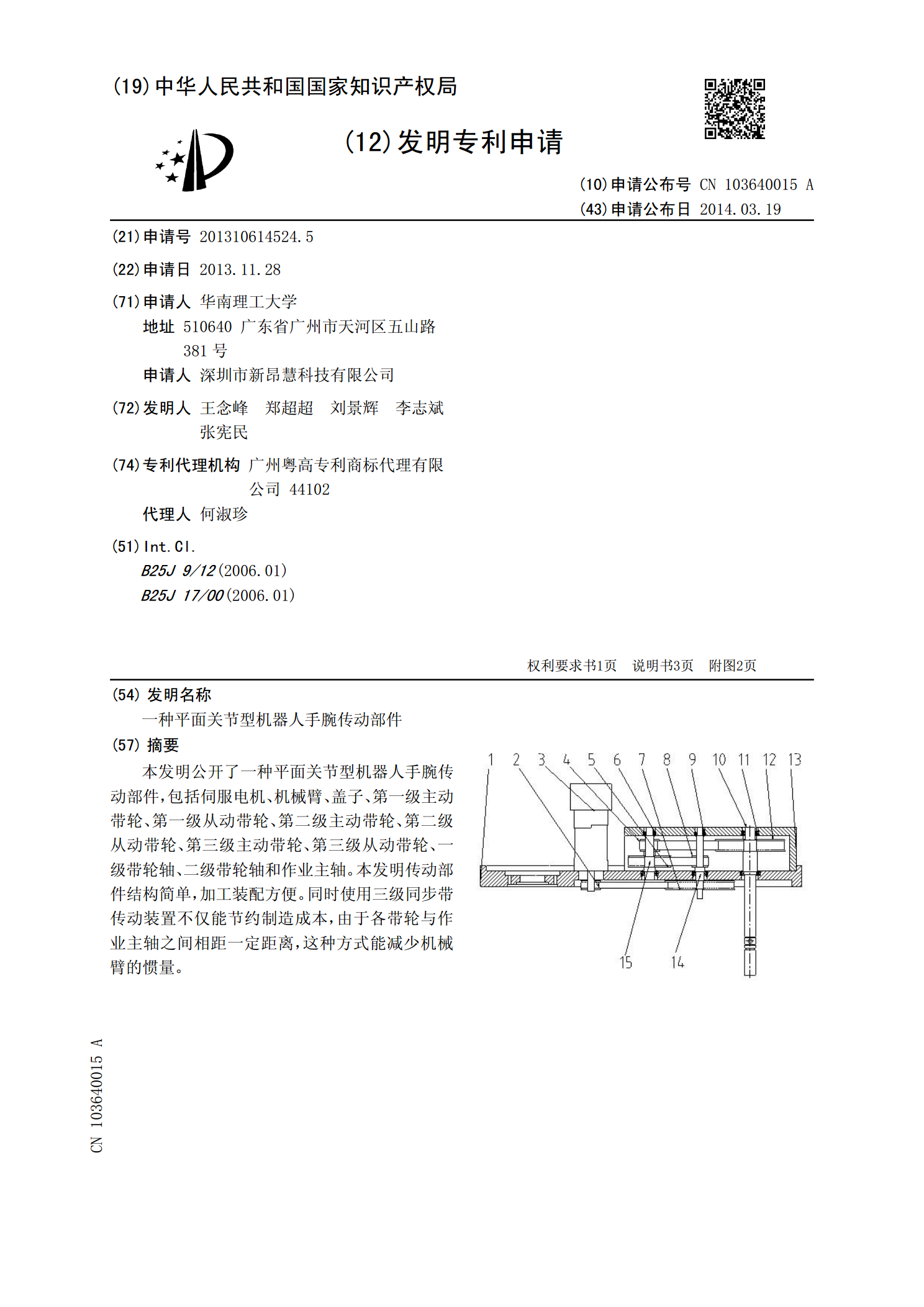
本发明公开了一种平面关节型机器人手腕传动部件,包括伺服电机、机械臂、盖子、第一级主动带轮、第一级从动带轮、第二级主动带轮、第二级从动带轮、第三级主动带轮、第三级从动带轮、一级带轮轴、二级带轮轴和作业主轴。本发明传动部件结构简单,加工装配方便。同时使用三级同步带传动装置不仅能节约制造成本,由于各带轮与作业主轴之间相距一定距离,这种方式能减少机械臂的惯量。
一种基于皮带传动的仿人型平面多关节机器人.pdf
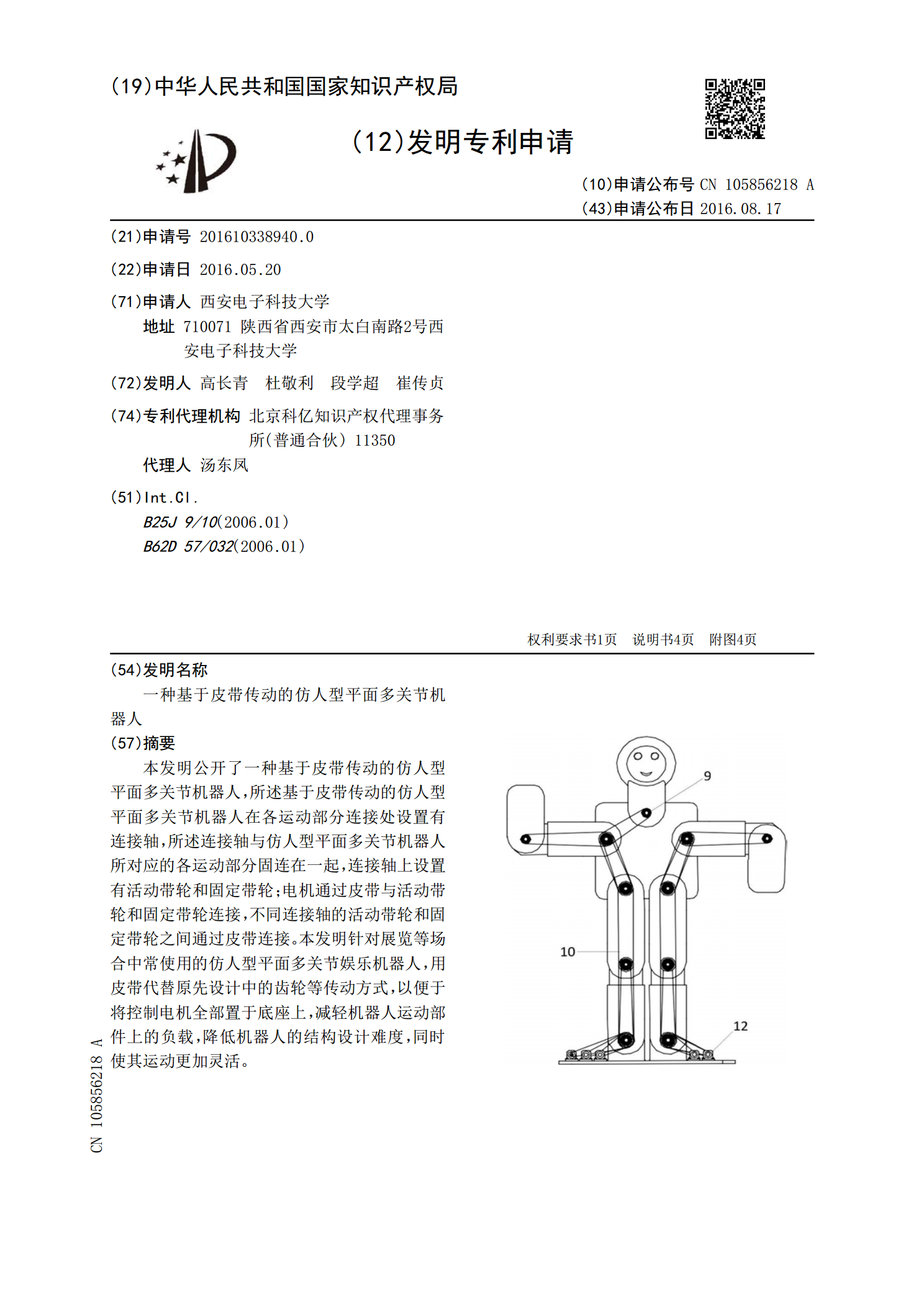
本发明公开了一种基于皮带传动的仿人型平面多关节机器人,所述基于皮带传动的仿人型平面多关节机器人在各运动部分连接处设置有连接轴,所述连接轴与仿人型平面多关节机器人所对应的各运动部分固连在一起,连接轴上设置有活动带轮和固定带轮;电机通过皮带与活动带轮和固定带轮连接,不同连接轴的活动带轮和固定带轮之间通过皮带连接。本发明针对展览等场合中常使用的仿人型平面多关节娱乐机器人,用皮带代替原先设计中的齿轮等传动方式,以便于将控制电机全部置于底座上,减轻机器人运动部件上的负载,降低机器人的结构设计难度,同时使其运动更加灵
一种新型平面关节型机器人结构.pdf
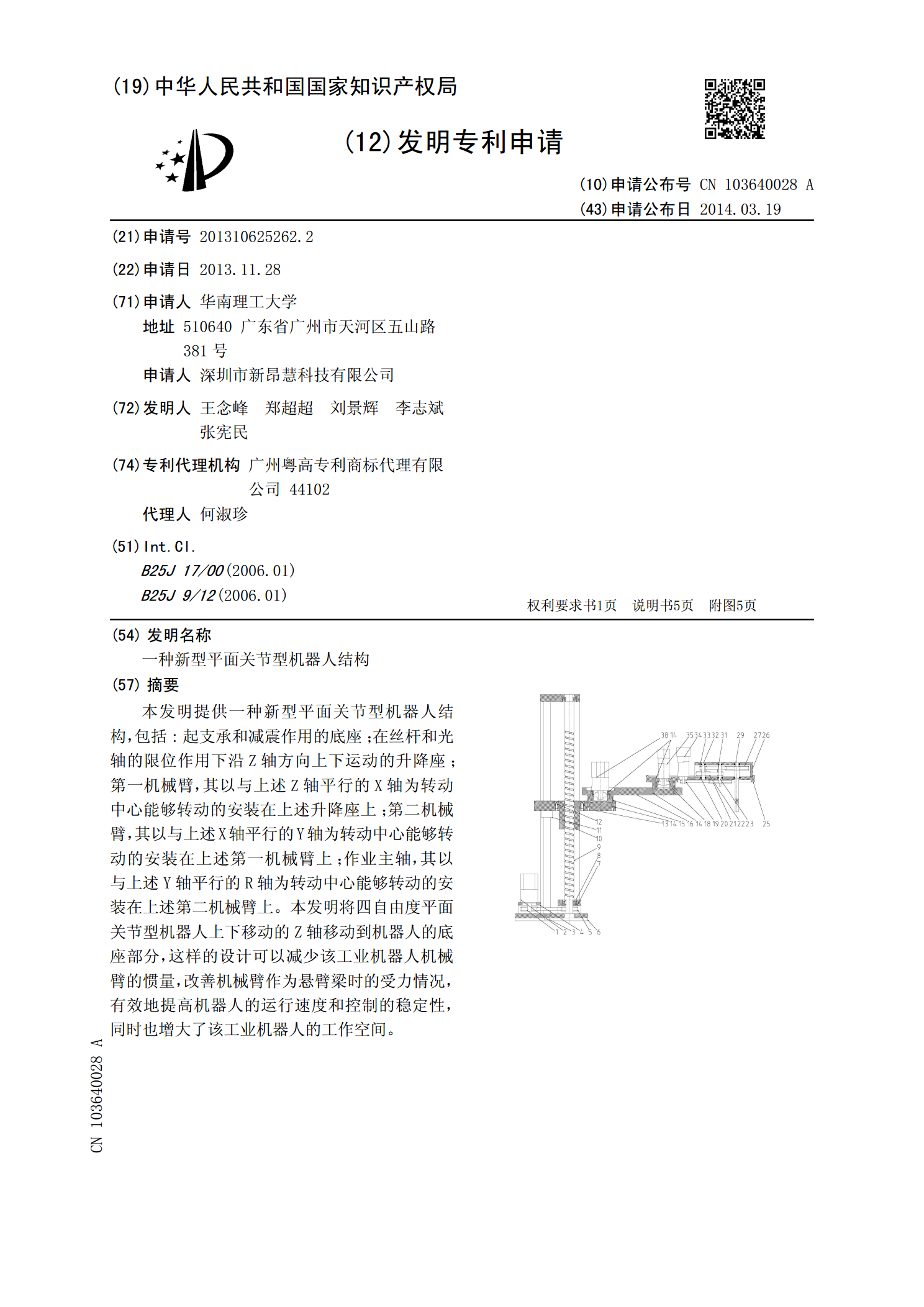
本发明提供一种新型平面关节型机器人结构,包括:起支承和减震作用的底座;在丝杆和光轴的限位作用下沿Z轴方向上下运动的升降座;第一机械臂,其以与上述Z轴平行的X轴为转动中心能够转动的安装在上述升降座上;第二机械臂,其以与上述X轴平行的Y轴为转动中心能够转动的安装在上述第一机械臂上;作业主轴,其以与上述Y轴平行的R轴为转动中心能够转动的安装在上述第二机械臂上。本发明将四自由度平面关节型机器人上下移动的Z轴移动到机器人的底座部分,这样的设计可以减少该工业机器人机械臂的惯量,改善机械臂作为悬臂梁时的受力情况,有效地

一种机器人手腕关节.pdf
本发明公开了一种机器人手腕关节,包括第一关节动力轴,所述第一关节动力轴与第二关节动力轴分别通过锥齿轮与第一传动轴、第二转动轴连接,所述第一传动轴通过链条或皮带与第二关节从动轴连接,所述第二转动轴通过链条或皮带与第二从动轮连接,所述第二从动轮安装在减速器的输入端上,所述减速器的输出端与第二关节摆臂连接,所述第二关节从动轴通过锥齿轮与设于第二关节摆臂内部的第三关节动力轴连接,所述第二关节摆臂末端侧壁形成有圆筒形的壳体,所述壳体内设有可转动的内筒,所述第三关节动力轴转动能够将动力传输至内筒,使得内筒转动,本发明