
工业机器人码垛方案设计.doc

yy****24


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业机器人码垛方案设计.doc
工业机器人码垛方案设计项目简介桥箱类零件生产具有精度高、加工工序多、形状复杂、重量重的特点,为提高加工精度及生产效率,各重型汽车生产厂纷纷采用数控加工中心来加工此类的零部件。使用数控加工中心加工工件时,要求工件在工作台上具有非常高的定位精度,且需要保证每次上料的一致性。由于人工上料这类的工件具有劳动强度高、上料精度不好控制等缺点,现在正逐步被工业机器人或专机进行上下料所取代。工业机器人的应用具有重复定位精度高,可靠性高,生产柔性化,自动化程度高等无可比拟的优势。与人工相比,能够极大地提高生产效率和产品品质
工业机器人码垛 教案.pdf
章节与课工业机器人码垛题课型实训教时2教学目认知目标1.了解码垛的应用和算法;标2.掌握码垛任务工作站的创建和配置;3.掌握码垛任务机器人程序编写与调试。能力目标会码垛的应用和算法。能够熟练码垛任务工作站的创建和配置。教学重点:掌握码垛任务工作站的创建和配置教学难点:掌握码垛任务机器人程序编写与调试。教具(工量具)准备:教学PPT书本浙江信息工程学校教案纸(2)板书设计:无教学后思:学生掌握的相对不错,因本节课知识点有点难,顾上课效果一般。浙江信息工程学校教案纸(3)第教时步骤用时教师活动学生活动备(分)
FANUC工业机器人码垛编程详解!.pdf
FANUC工业机器人码垛编程详解!1.码垛功能的定义对几个具有代表性的点进行示教,即可以从下层到上层按照顺序堆叠工件。2.码垛的种类码垛B:包括码垛B(单路径模式)和码垛BX(多路径模式)适用于工件姿势恒定,堆叠时的底面形状为直线或四角形。码垛E:包括码垛E(单路径模式)和码垛EX(多路径模式)适用于复杂的堆叠模式(工件姿势改变,堆叠时的底面形状不是四角形)。3.码垛指令(1)码垛指令格式:码垛指令基于码垛寄存器的值,根据堆叠模式计算当前的堆叠点位置,并根据路径模式计算当前的路径,改写码垛动作指令的位置数
一种工业用码垛机器人.pdf
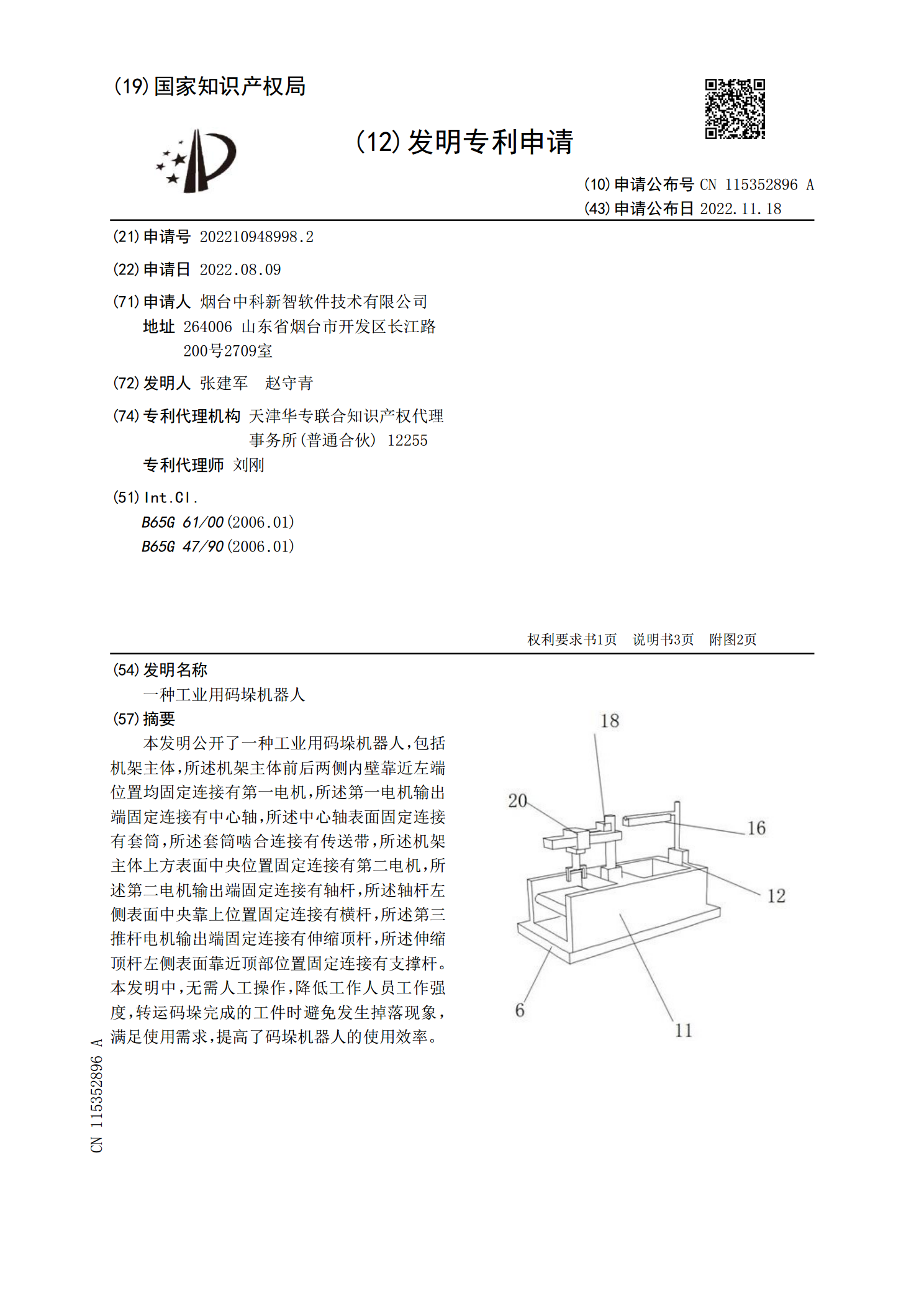
本发明公开了一种工业用码垛机器人,包括机架主体,所述机架主体前后两侧内壁靠近左端位置均固定连接有第一电机,所述第一电机输出端固定连接有中心轴,所述中心轴表面固定连接有套筒,所述套筒啮合连接有传送带,所述机架主体上方表面中央位置固定连接有第二电机,所述第二电机输出端固定连接有轴杆,所述轴杆左侧表面中央靠上位置固定连接有横杆,所述第三推杆电机输出端固定连接有伸缩顶杆,所述伸缩顶杆左侧表面靠近顶部位置固定连接有支撑杆。本发明中,无需人工操作,降低工作人员工作强度,转运码垛完成的工件时避免发生掉落现象,满足使用需
一种工业机器人码垛装置.pdf
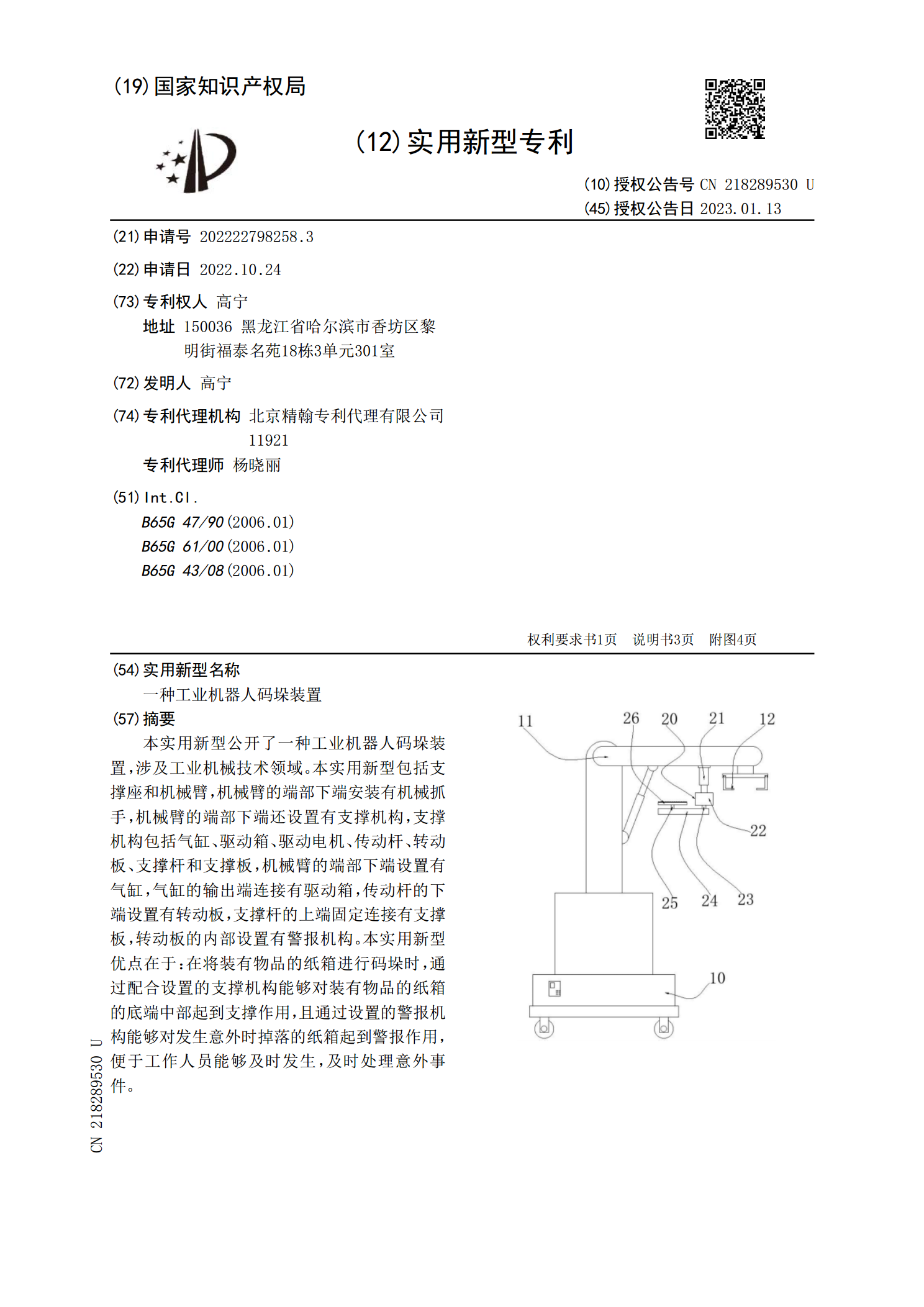
本实用新型公开了一种工业机器人码垛装置,涉及工业机械技术领域。本实用新型包括支撑座和机械臂,机械臂的端部下端安装有机械抓手,机械臂的端部下端还设置有支撑机构,支撑机构包括气缸、驱动箱、驱动电机、传动杆、转动板、支撑杆和支撑板,机械臂的端部下端设置有气缸,气缸的输出端连接有驱动箱,传动杆的下端设置有转动板,支撑杆的上端固定连接有支撑板,转动板的内部设置有警报机构。本实用新型优点在于:在将装有物品的纸箱进行码垛时,通过配合设置的支撑机构能够对装有物品的纸箱的底端中部起到支撑作用,且通过设置的警报机构能够对发生