
电动汽车论文:基于视觉的四轮驱动电动汽车转向控制方法研究.doc

yy****24


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

电动汽车论文:基于视觉的四轮驱动电动汽车转向控制方法研究.doc
电动汽车论文:基于视觉的四轮驱动电动汽车转向控制方法研究【中文摘要】节能、环保及安全是现代汽车工业发展三大主题。面临21世纪能源及环境问题的严峻挑战,世界各国均将车辆节能、环保作为重要研究方向。其中,电动汽车是最受关注领域之一。与此同时,车辆安全性亦备受关注,而车辆操纵稳定性是其安全性重要内容之一。为改善车辆操纵稳定性,四轮转向技术被应用到车辆转向系统中,该技术能够提高车辆低速时的机动灵活性,改善高速时的操纵稳定性。随着科学技术发展,机器视觉及各种新控制方法亦被应用于车辆上,以提高车辆行驶时的安全性。本文

基于四轮驱动的电动汽车稳定控制系统及方法及电动汽车.pdf
在本发明公开的基于四轮驱动的电动汽车稳定控制系统中,第一稳定控制单元判断侧向加速度是否小于预设的加速度阀值。若否,第一稳定控制单元根据侧向加速度信号计算横向载荷转移率,并根据横向载荷转移率判断车辆状态。若车辆有第一趋势,第二稳定控制单元控制电动汽车车身保持稳定。若车辆有第二趋势,第一稳定控制单元通过电机控制器控制电机对车辆的外侧前轮施加制动力。若车辆有第三趋势,第一稳定控制单元通过电机控制器控制电机对外侧前轮及车辆的内侧后轮施加制动力。上述稳定控制系统中,第一稳定控制单元根据车辆的不同状态,采取对应的稳定
一种四轮驱动电动汽车转向稳定控制方法.pdf
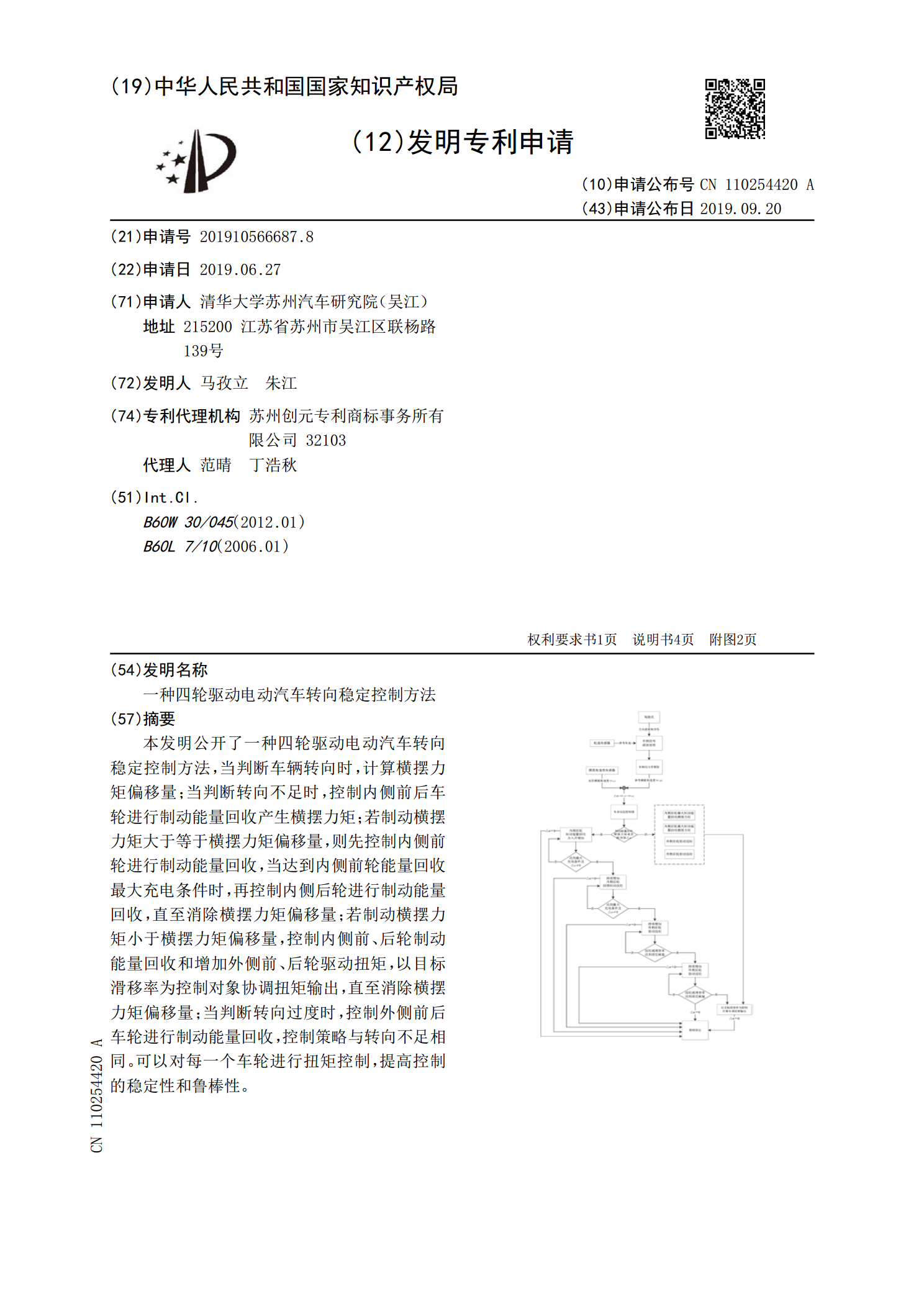
本发明公开了一种四轮驱动电动汽车转向稳定控制方法,当判断车辆转向时,计算横摆力矩偏移量;当判断转向不足时,控制内侧前后车轮进行制动能量回收产生横摆力矩;若制动横摆力矩大于等于横摆力矩偏移量,则先控制内侧前轮进行制动能量回收,当达到内侧前轮能量回收最大充电条件时,再控制内侧后轮进行制动能量回收,直至消除横摆力矩偏移量;若制动横摆力矩小于横摆力矩偏移量,控制内侧前、后轮制动能量回收和增加外侧前、后轮驱动扭矩,以目标滑移率为控制对象协调扭矩输出,直至消除横摆力矩偏移量;当判断转向过度时,控制外侧前后车轮进行制动

基于四轮驱动的电动汽车的制动系统及方法及电动汽车.pdf
在本发明公开的基于四轮驱动的电动汽车的制动系统中,第一制动控制单元根据电动汽车的制动模式、电池包的剩余电量及车速通过电机控制器控制电机对车轮制动,第二制动控制单元根据电动汽车的制动模式、电池包的剩余电量及车速控制制动执行机构对车轮制动。第一制动控制单元判断制动执行机构对车轮的制动是否失效。若失效,第一制动控制单元通过电机控制器控制电机对相应的车轮制动。上述制动系统中,第一制动控制单元可采取不同的制动手段,使电机制动及制动执行机构制动相互协作。同时,在制动执行机构对车轮的制动失效时,第一制动控制单元能够控制

控制电动汽车转向平衡的方法和能转向平衡的电动汽车.pdf
本发明公开了一种控制电动汽车转向平衡的方法和能转向平衡的电动汽车,属于车辆技术领域,其包括车体和车桥,特征在于:在车体和车桥之间设置左右分布的机械伸缩装置,机械伸缩装置的上下端对应联接车体和车桥,当车辆转弯时,至少位于转弯外侧的机械伸缩装置调节为固定长度;当车辆直行时,机械伸缩装置呈自由活动状态。此种方法和电动汽车由于只有在电动汽车转向时,才将液压缸或者气缸的工作腔关闭,使液压缸或者气缸调节为固定长度,用以支撑住车体的转向外侧,防止转向外侧的车体在惯性的作用下下压;在电动汽车正常行驶时,液压缸或者气缸的工