
一种基于工业机械臂的可定位焊接方法及其焊枪.pdf

a是****澜吖


1/7
2/7
3/7

4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于工业机械臂的可定位焊接方法及其焊枪.pdf
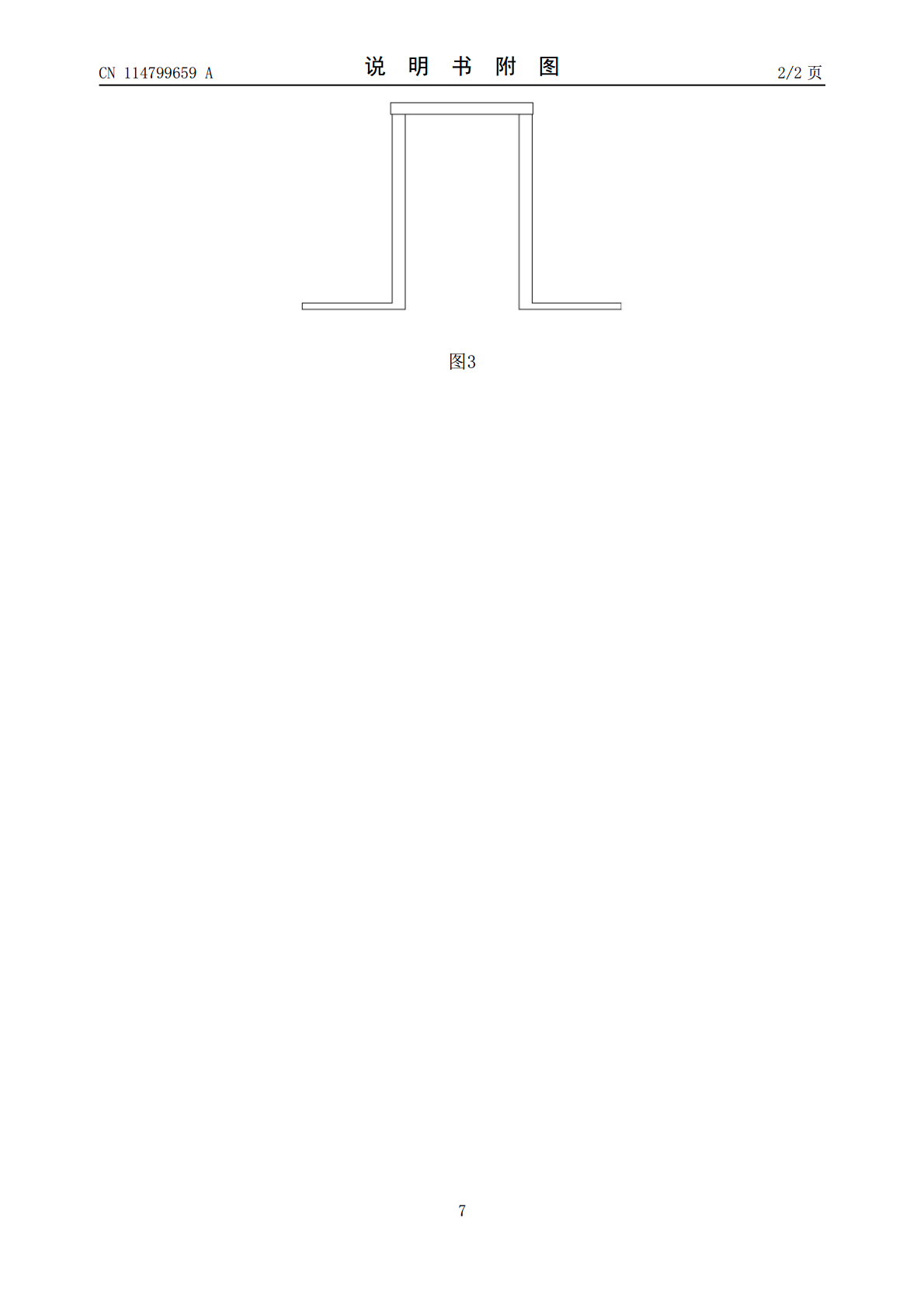
本发明公开了一种基于工业机械臂的可定位焊接方法,包括工业机械臂和细长状的焊枪,通过工业机械臂控制焊枪伸入管型梁的内部,启动焊枪对管型梁内部与其他部件的连接处进行焊接,焊枪的喷嘴设置成多向输出且每个输出端均对应管型梁内部的连接处,通过多个喷嘴同时与焊接位置相对应以形成定位,本发明公开了对应该焊接方法的焊枪,包括与机械臂末端相连的法兰盘、空心的枪管和喷头,法兰盘的一侧与枪管相连且枪管的轴心与法兰盘的中心共线,喷嘴分别设置在喷头的两侧,枪管呈细长状设置;采用本技术方案,可以伸入管型梁的内部进行沿边焊接,形成稳定
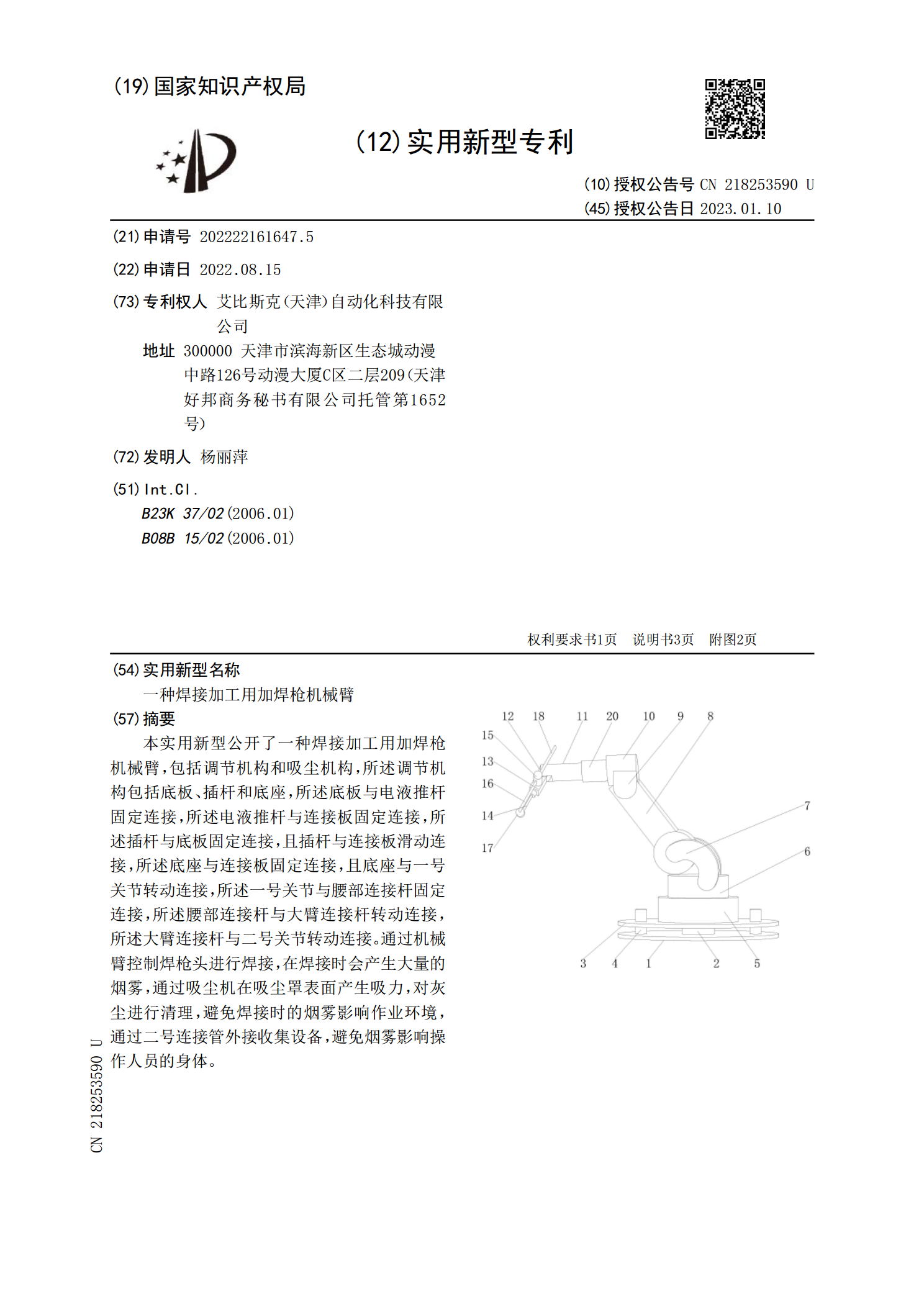
一种焊接加工用加焊枪机械臂.pdf
本实用新型公开了一种焊接加工用加焊枪机械臂,包括调节机构和吸尘机构,所述调节机构包括底板、插杆和底座,所述底板与电液推杆固定连接,所述电液推杆与连接板固定连接,所述插杆与底板固定连接,且插杆与连接板滑动连接,所述底座与连接板固定连接,且底座与一号关节转动连接,所述一号关节与腰部连接杆固定连接,所述腰部连接杆与大臂连接杆转动连接,所述大臂连接杆与二号关节转动连接。通过机械臂控制焊枪头进行焊接,在焊接时会产生大量的烟雾,通过吸尘机在吸尘罩表面产生吸力,对灰尘进行清理,避免焊接时的烟雾影响作业环境,通过二号连接
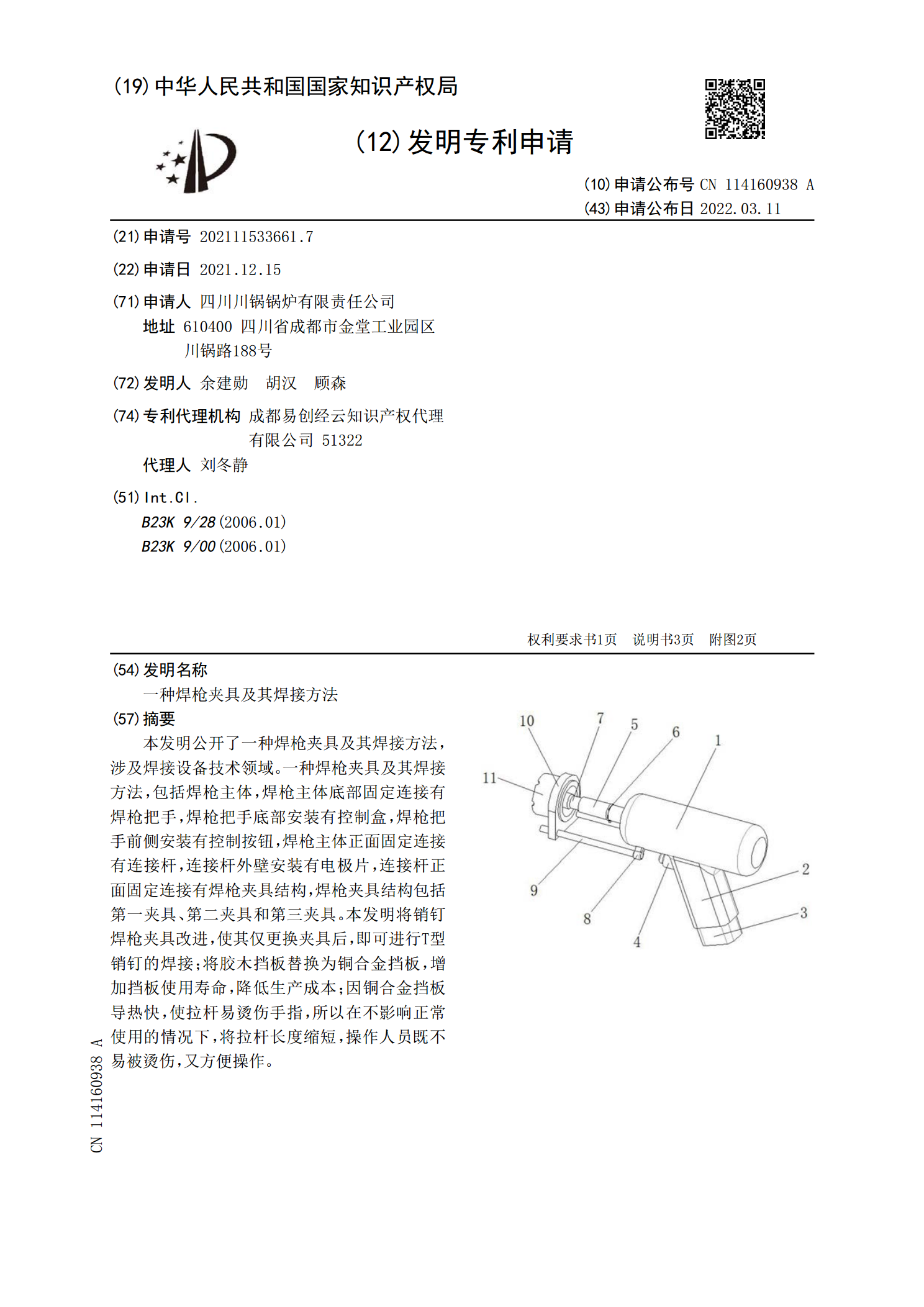
一种焊枪夹具及其焊接方法.pdf
本发明公开了一种焊枪夹具及其焊接方法,涉及焊接设备技术领域。一种焊枪夹具及其焊接方法,包括焊枪主体,焊枪主体底部固定连接有焊枪把手,焊枪把手底部安装有控制盒,焊枪把手前侧安装有控制按钮,焊枪主体正面固定连接有连接杆,连接杆外壁安装有电极片,连接杆正面固定连接有焊枪夹具结构,焊枪夹具结构包括第一夹具、第二夹具和第三夹具。本发明将销钉焊枪夹具改进,使其仅更换夹具后,即可进行T型销钉的焊接;将胶木挡板替换为铜合金挡板,增加挡板使用寿命,降低生产成本;因铜合金挡板导热快,使拉杆易烫伤手指,所以在不影响正常使用的情

一种工业机械用钢管定位焊接装置及焊接方法.pdf
本发明公开了工业机械技术领域的一种工业机械用钢管定位焊接装置,包括固定壳体,所述固定壳体的内腔底部设置固定支架,所述固定支架的相对端面连接焊接箱,所述焊接箱的左右两侧内壁均设置电机,所述电机的输出端连接转轴,所述转轴的另一端连接主动齿轮,所述焊接箱的内腔活动连接两组紧固装置,两组所述紧固装置靠近焊接箱左右两侧内壁的一端连接从动齿轮,所述固定壳体的内腔顶部设置液压伸缩杆,所述液压伸缩杆的输出端连接焊接枪,所述固定壳体的内腔顶部设置保护壳,保证了钢管的焊接精度,而且是钢管在焊接时更加的稳固,使钢管焊接时对接处
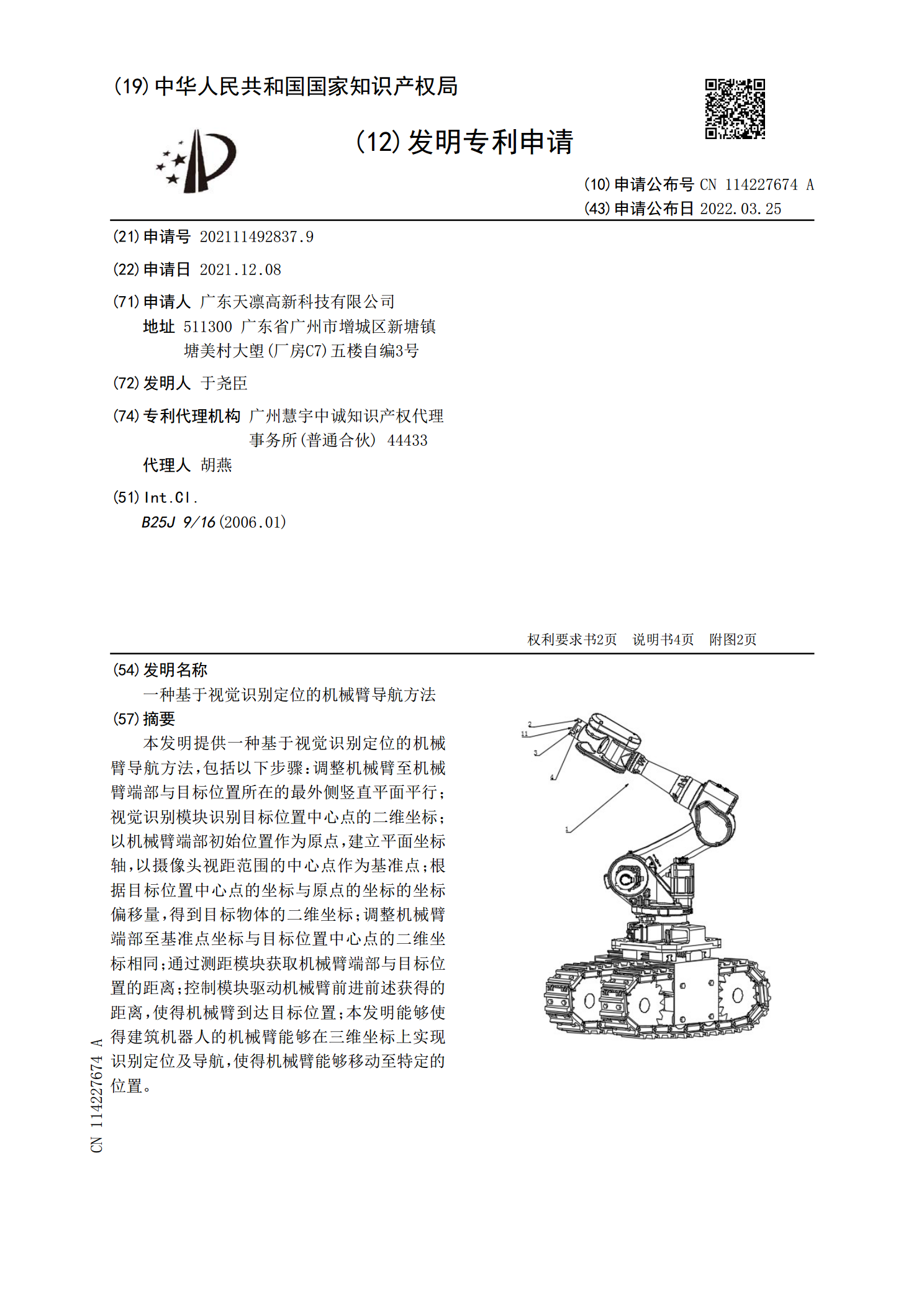
一种基于视觉识别定位的机械臂导航方法.pdf
本发明提供一种基于视觉识别定位的机械臂导航方法,包括以下步骤:调整机械臂至机械臂端部与目标位置所在的最外侧竖直平面平行;视觉识别模块识别目标位置中心点的二维坐标;以机械臂端部初始位置作为原点,建立平面坐标轴,以摄像头视距范围的中心点作为基准点;根据目标位置中心点的坐标与原点的坐标的坐标偏移量,得到目标物体的二维坐标;调整机械臂端部至基准点坐标与目标位置中心点的二维坐标相同;通过测距模块获取机械臂端部与目标位置的距离;控制模块驱动机械臂前进前述获得的距离,使得机械臂到达目标位置;本发明能够使得建筑机器人的机