
一种无人机机载的桥梁检测平面追踪装置及方法.pdf

觅松****哥哥


1/10
2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人机机载的桥梁检测平面追踪装置及方法.pdf
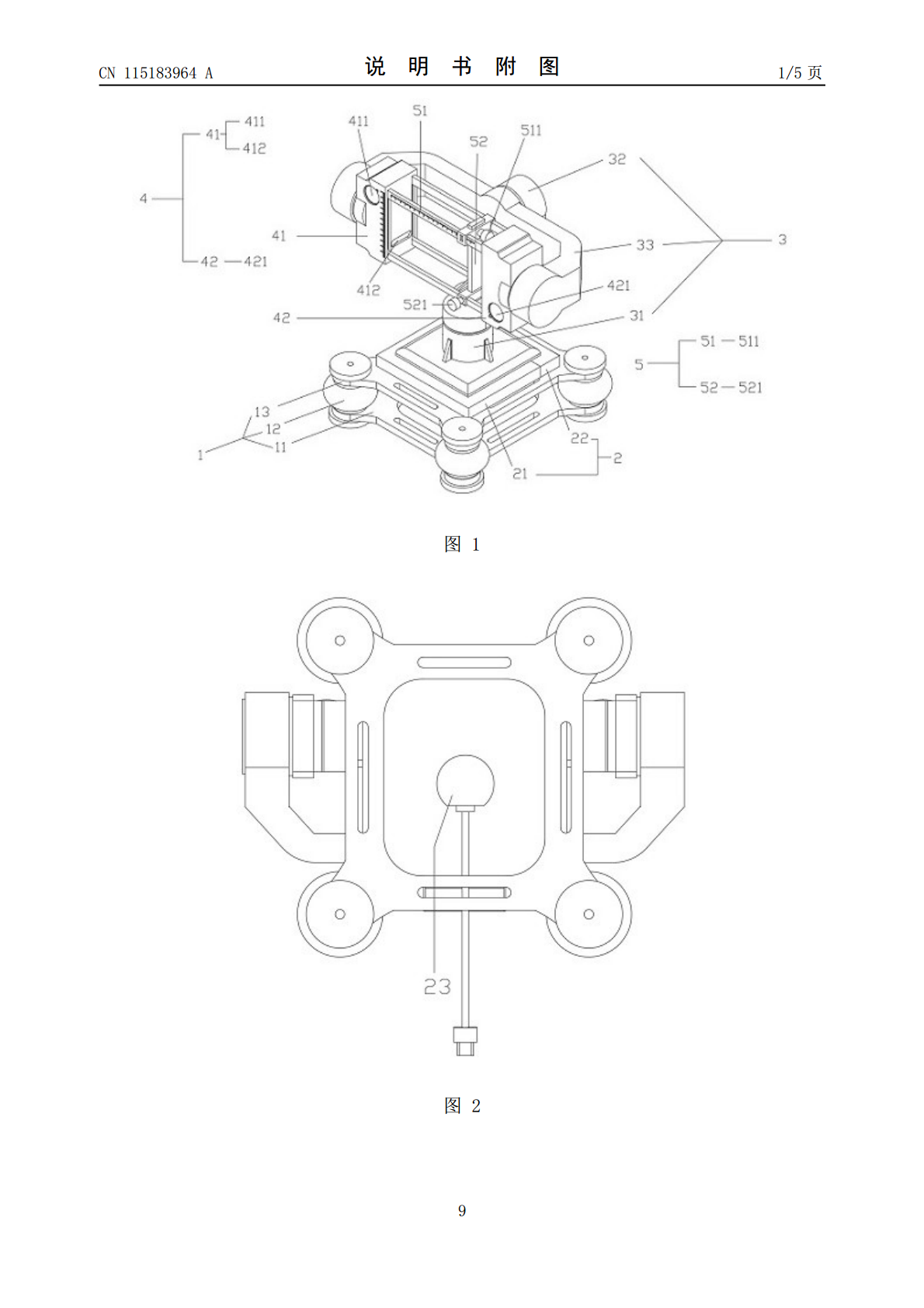
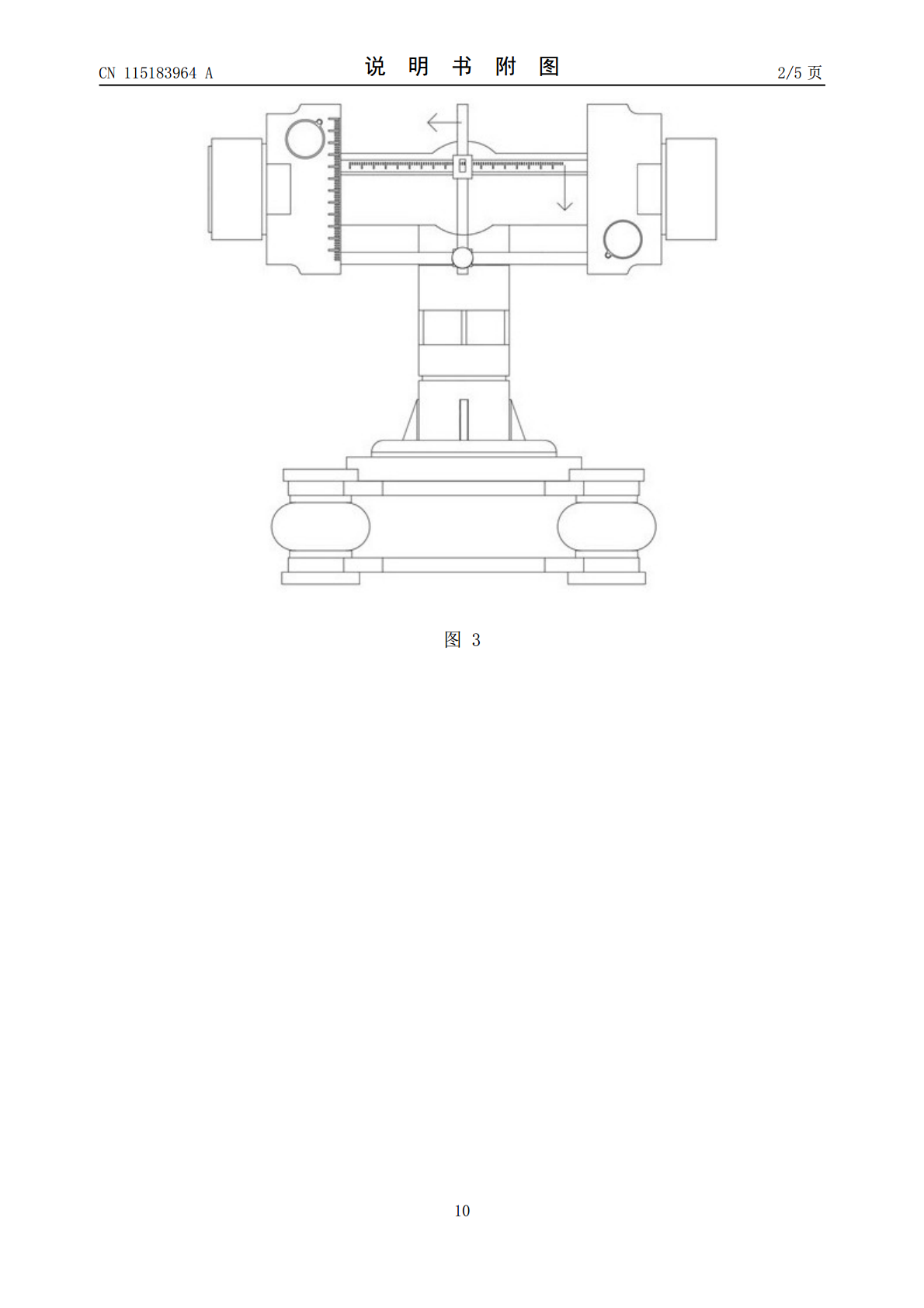
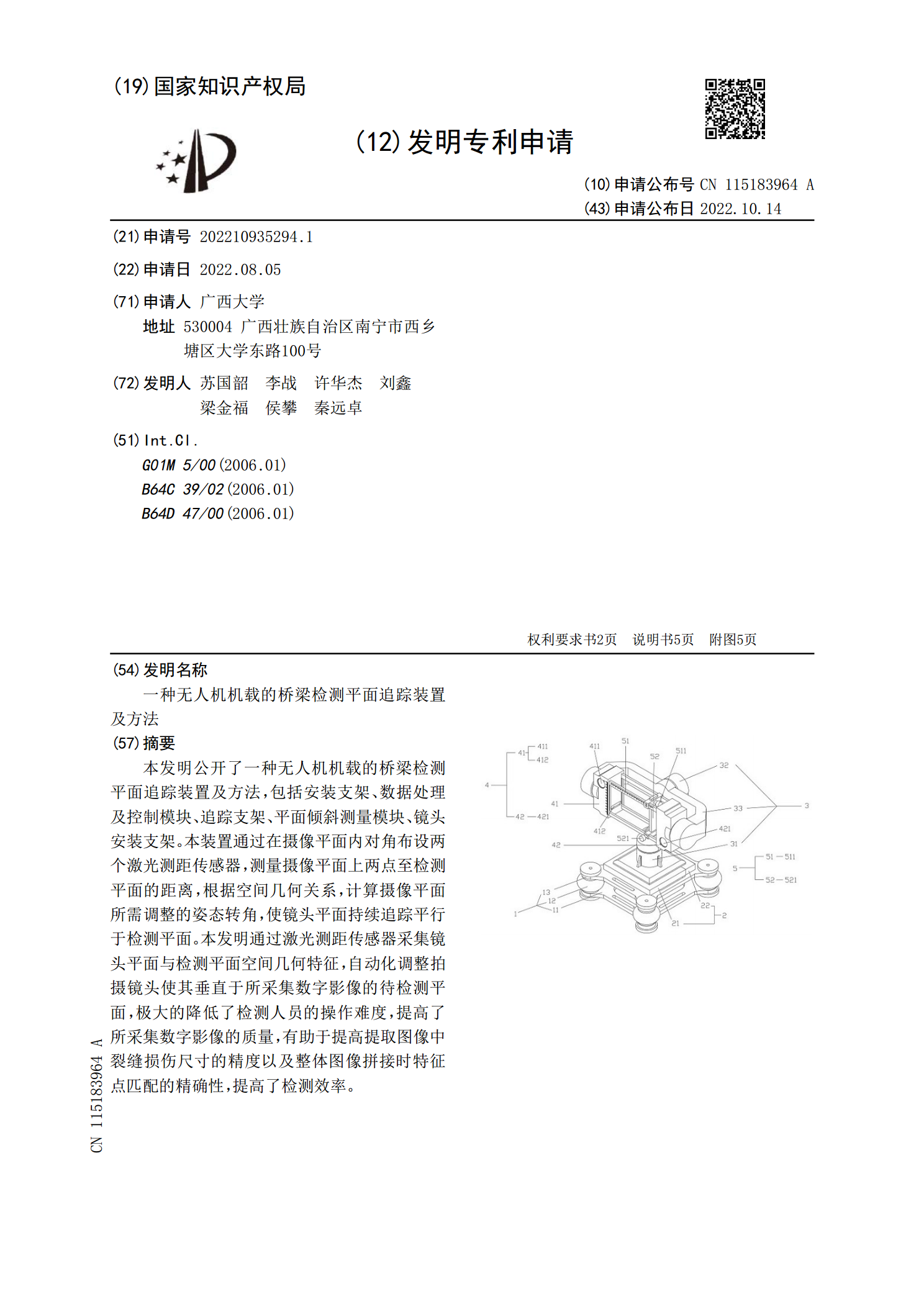
本发明公开了一种无人机机载的桥梁检测平面追踪装置及方法,包括安装支架、数据处理及控制模块、追踪支架、平面倾斜测量模块、镜头安装支架。本装置通过在摄像平面内对角布设两个激光测距传感器,测量摄像平面上两点至检测平面的距离,根据空间几何关系,计算摄像平面所需调整的姿态转角,使镜头平面持续追踪平行于检测平面。本发明通过激光测距传感器采集镜头平面与检测平面空间几何特征,自动化调整拍摄镜头使其垂直于所采集数字影像的待检测平面,极大的降低了检测人员的操作难度,提高了所采集数字影像的质量,有助于提高提取图像中裂缝损伤尺寸

基于舵机控制的无人机机载桥梁挠度变化测量装置及方法.pdf
本发明公开了一种基于舵机控制的无人机机载桥梁挠度变化测量装置及方法,所述装置包括安装支架、控制及数据处理模块、测量模块、供电及数据传输模块。采用将激光测距传感器同伺服舵机输出轴连接,通过沿顺桥长方向相对飞行水平面竖向夹角为45°、90°、135°三个指向对梁底三点进行激光测距;然后采用所述方法,根据所采集测量数据的几何关系进行运算,将测量坐标系转换至跨中坐标系,得到桥梁底曲线方程,由两次测量所得桥梁底曲线方程与飞行高度差根据挠度变化方程得到梁底任意位置挠度变化值。本发明对操作人员、无人机平台等条件要求较低

基于时序控制的无人机机载桥梁挠度变化测量装置及方法.pdf
本发明公开了一种基于时序控制的无人机机载桥梁挠度变化测量装置及方法,所述装置包括安装支架、控制及数据处理模块、测量模块、供电及数据传输模块。采用单片机指令时序对多台激光测距传感器所组成的传感器组进行控制,通过沿顺桥长方向对桥梁底具有相同间隔的任意三点进行激光测距,根据所采集测量数据的几何特征关系进行计算,将测量坐标系转换至跨中坐标系,得到该坐标系下桥梁底曲线方程,由两次测量所得桥梁底曲线方程与两次飞行高度差根据挠度变化方程得到梁底任意位置挠度变化值。本发明对操作人员、无人机平台等条件要求较低,无需预设靶点

一种无人机载测向装置.pdf
本发明涉及无人机技术领域,具体而言,涉及一种无人机载测向装置,包括测向主机、减振装置、天线阵和固定件;所述测向主机的顶部连接所述减振装置,所述减振装置用于与无人机连接,所述固定件的一端连接所述测向主机的底部,所述固定件的另一端连接所述天线阵;所述天线阵的重心在所述测向装置与所述无人机连接后的重心线上。测向装置挂载在无人机上,解决传统无线通信测向系统经常出现测向盲区的问题,可在高楼和地面多障碍的环境下进行测向。
一种桥梁裂缝无人机检测装置及其图像处理方法.pdf
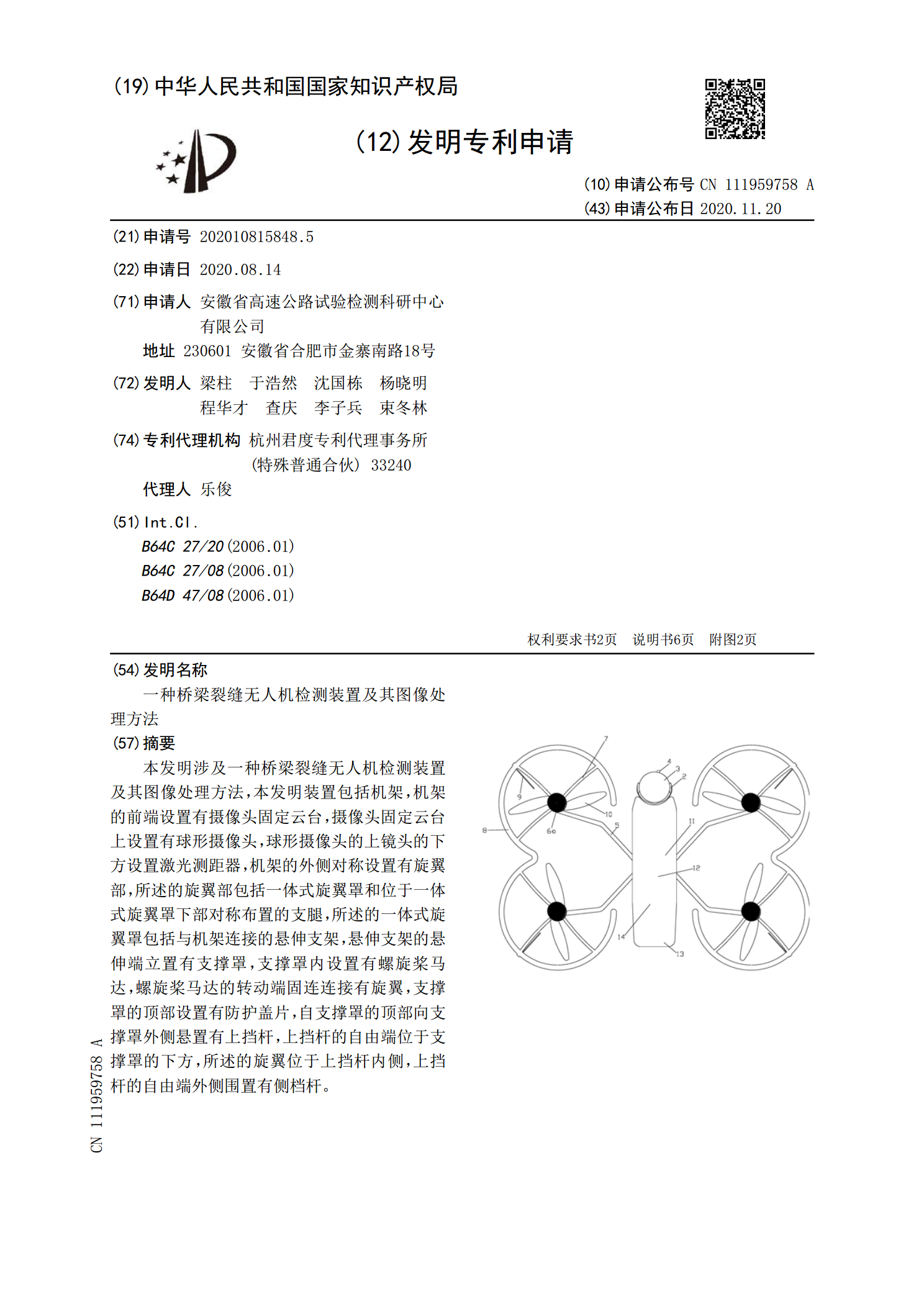
本发明涉及一种桥梁裂缝无人机检测装置及其图像处理方法,本发明装置包括机架,机架的前端设置有摄像头固定云台,摄像头固定云台上设置有球形摄像头,球形摄像头的上镜头的下方设置激光测距器,机架的外侧对称设置有旋翼部,所述的旋翼部包括一体式旋翼罩和位于一体式旋翼罩下部对称布置的支腿,所述的一体式旋翼罩包括与机架连接的悬伸支架,悬伸支架的悬伸端立置有支撑罩,支撑罩内设置有螺旋桨马达,螺旋桨马达的转动端固连连接有旋翼,支撑罩的顶部设置有防护盖片,自支撑罩的顶部向支撑罩外侧悬置有上挡杆,上挡杆的自由端位于支撑罩的下方,所