
基于舵机控制的无人机机载桥梁挠度变化测量装置及方法.pdf

含秀****66

1/10

2/10
3/10
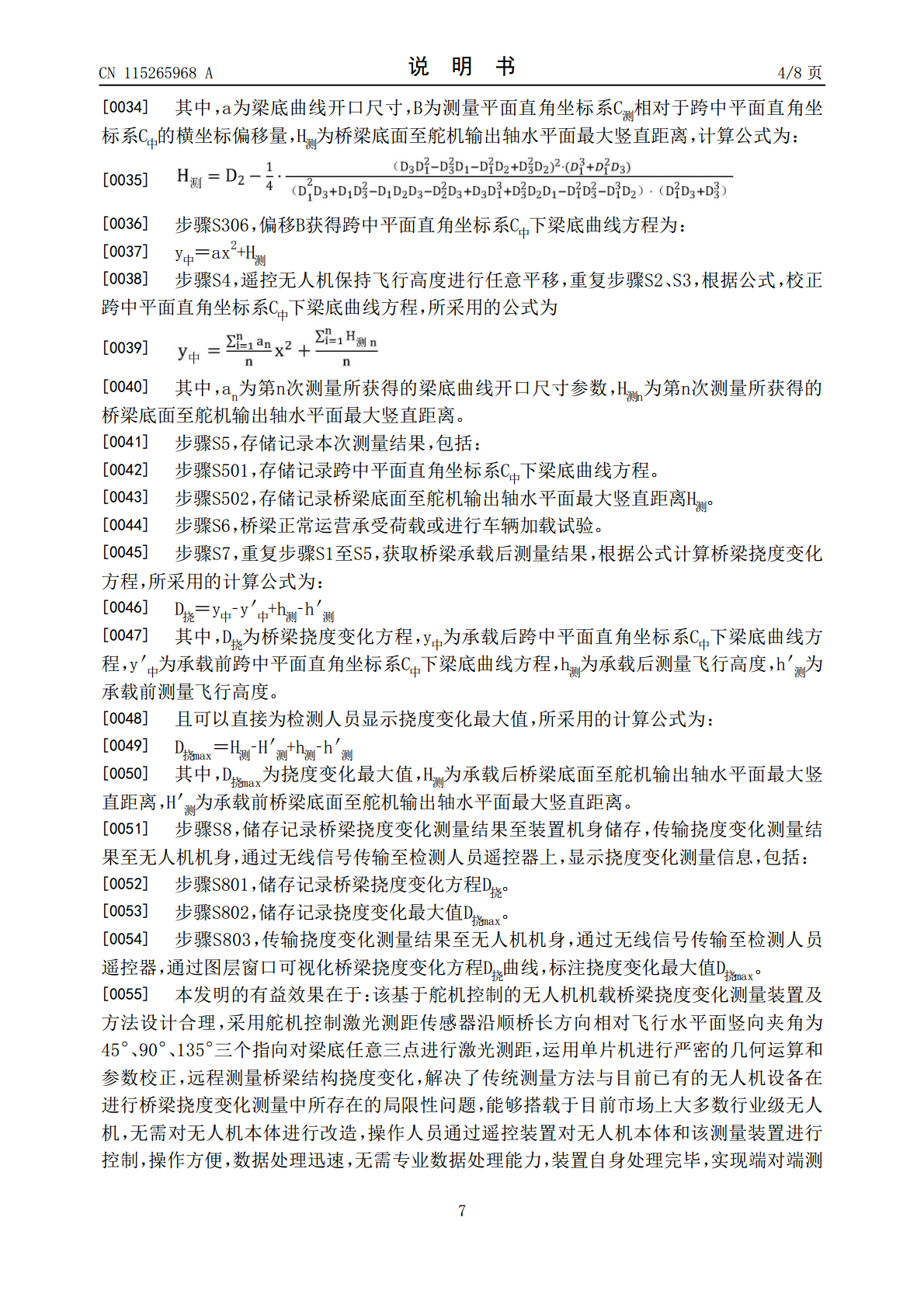
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于舵机控制的无人机机载桥梁挠度变化测量装置及方法.pdf
本发明公开了一种基于舵机控制的无人机机载桥梁挠度变化测量装置及方法,所述装置包括安装支架、控制及数据处理模块、测量模块、供电及数据传输模块。采用将激光测距传感器同伺服舵机输出轴连接,通过沿顺桥长方向相对飞行水平面竖向夹角为45°、90°、135°三个指向对梁底三点进行激光测距;然后采用所述方法,根据所采集测量数据的几何关系进行运算,将测量坐标系转换至跨中坐标系,得到桥梁底曲线方程,由两次测量所得桥梁底曲线方程与飞行高度差根据挠度变化方程得到梁底任意位置挠度变化值。本发明对操作人员、无人机平台等条件要求较低

基于时序控制的无人机机载桥梁挠度变化测量装置及方法.pdf
本发明公开了一种基于时序控制的无人机机载桥梁挠度变化测量装置及方法,所述装置包括安装支架、控制及数据处理模块、测量模块、供电及数据传输模块。采用单片机指令时序对多台激光测距传感器所组成的传感器组进行控制,通过沿顺桥长方向对桥梁底具有相同间隔的任意三点进行激光测距,根据所采集测量数据的几何特征关系进行计算,将测量坐标系转换至跨中坐标系,得到该坐标系下桥梁底曲线方程,由两次测量所得桥梁底曲线方程与两次飞行高度差根据挠度变化方程得到梁底任意位置挠度变化值。本发明对操作人员、无人机平台等条件要求较低,无需预设靶点

一种用于无人机的桥梁挠度检测装置及测量方法.pdf
本发明属于桥梁测量领域,公开了一种用于无人机的桥梁挠度检测装置及测量方法。所述装置包括激光测距模块、双轴云台、数据储存模块、数据处理模块、传输模块、控制模块、基座,并搭载于无人机平台上;所述测量方法适用于拱形桥梁和箱梁形桥梁,该测量方法获取桥梁底部中轴线上测量点的距离参数和角度参数,根据这两个参数,以无人机为坐标原点计算桥梁挠度曲线,并进行重复测量,将多组数据做平差处理,计算获取最终结果。本发明模块化程度高,结构简单,安装方便,成本低,测量范围大,使用方式灵活,测量精度高,操作简单,自动化程度高,能够把测

具有悬挂缆索的桥梁挠度测量装置及方法.docx
具有悬挂缆索的桥梁挠度测量装置及方法摘要:这篇论文介绍了一种具有悬挂缆索的桥梁挠度测量装置及方法。悬挂缆索桥梁是一种常见于大跨度桥梁的结构形式,其挠度测量对于结构的安全评估和监测十分重要。本文提出了一种基于光纤传感技术的挠度测量装置及方法,通过在桥梁主体结构上部安装悬挂缆索,并将光纤传感元件固定在缆索上,实现了对桥梁挠度的实时监测和测量。实验结果表明,该方法具有较高的精度和灵敏度,可以有效地监测桥梁的挠度变化,为桥梁结构的安全评估和维护提供了重要参考。关键词:悬挂缆索桥梁、挠度测量、光纤传感、安全评估1.
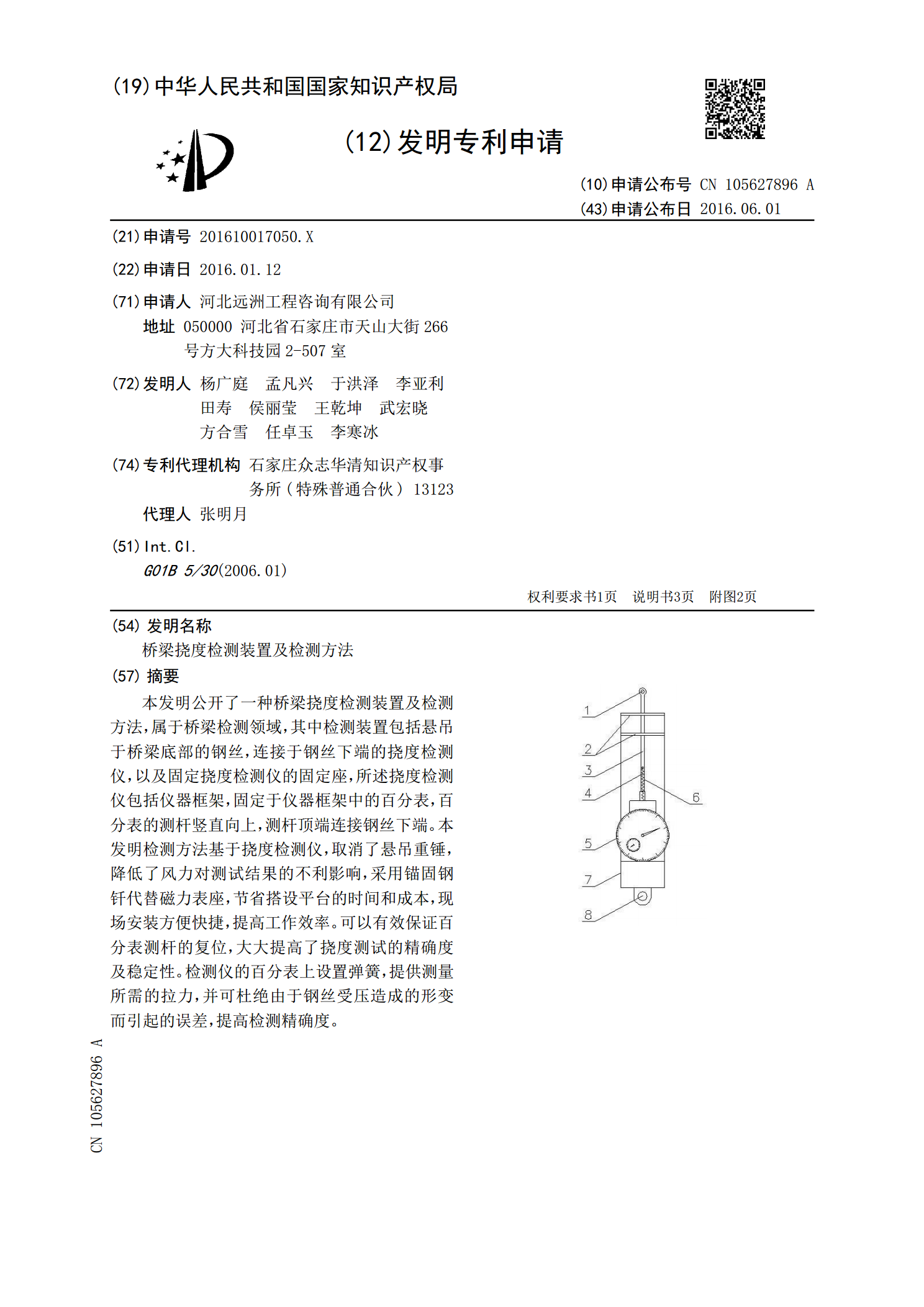
桥梁挠度检测装置及检测方法.pdf
本发明公开了一种桥梁挠度检测装置及检测方法,属于桥梁检测领域,其中检测装置包括悬吊于桥梁底部的钢丝,连接于钢丝下端的挠度检测仪,以及固定挠度检测仪的固定座,所述挠度检测仪包括仪器框架,固定于仪器框架中的百分表,百分表的测杆竖直向上,测杆顶端连接钢丝下端。本发明检测方法基于挠度检测仪,取消了悬吊重锤,降低了风力对测试结果的不利影响,采用锚固钢钎代替磁力表座,节省搭设平台的时间和成本,现场安装方便快捷,提高工作效率。可以有效保证百分表测杆的复位,大大提高了挠度测试的精确度及稳定性。检测仪的百分表上设置弹簧,提