
一种桥梁裂缝无人机检测装置及其图像处理方法.pdf

新月****姐a

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种桥梁裂缝无人机检测装置及其图像处理方法.pdf
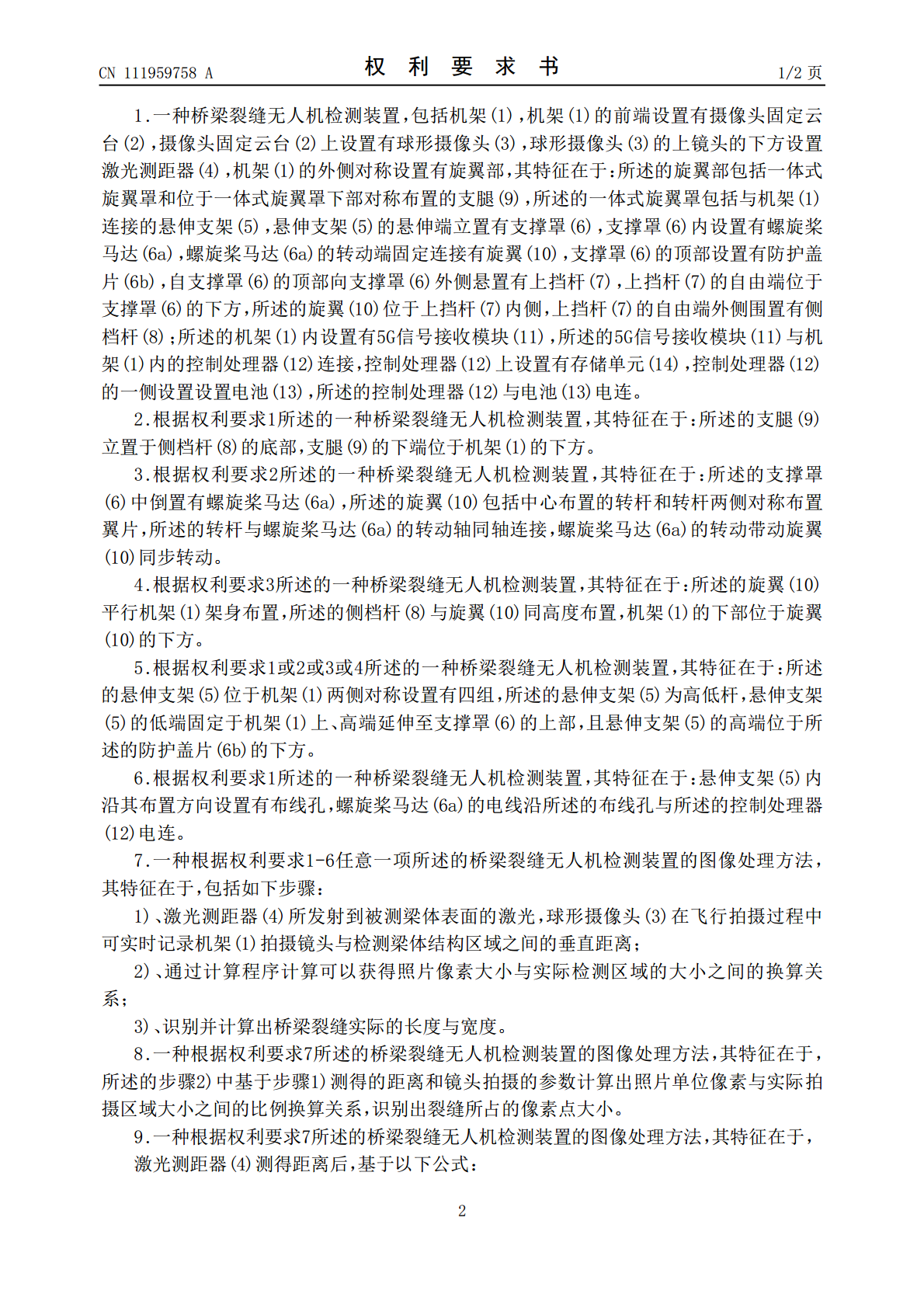
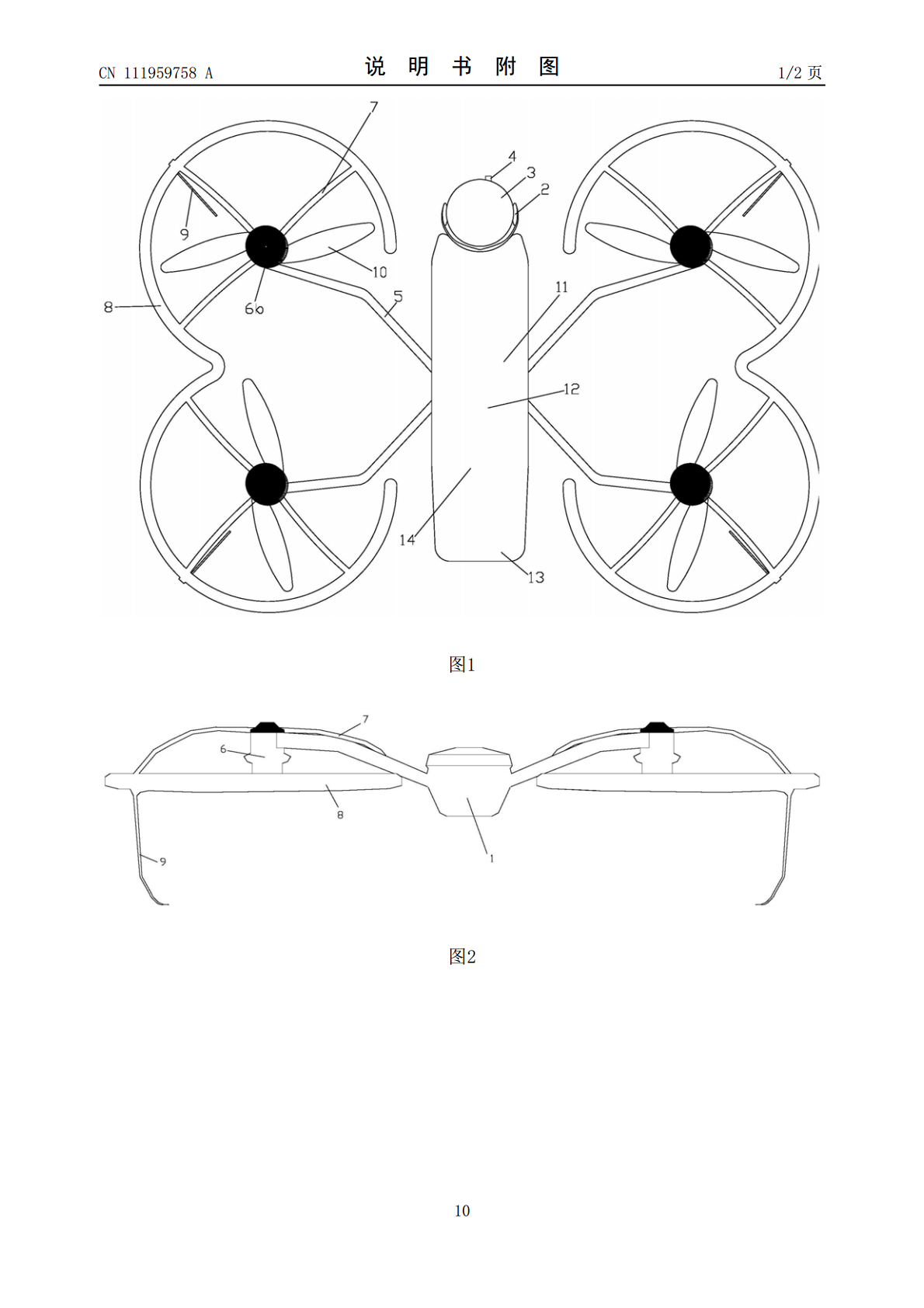
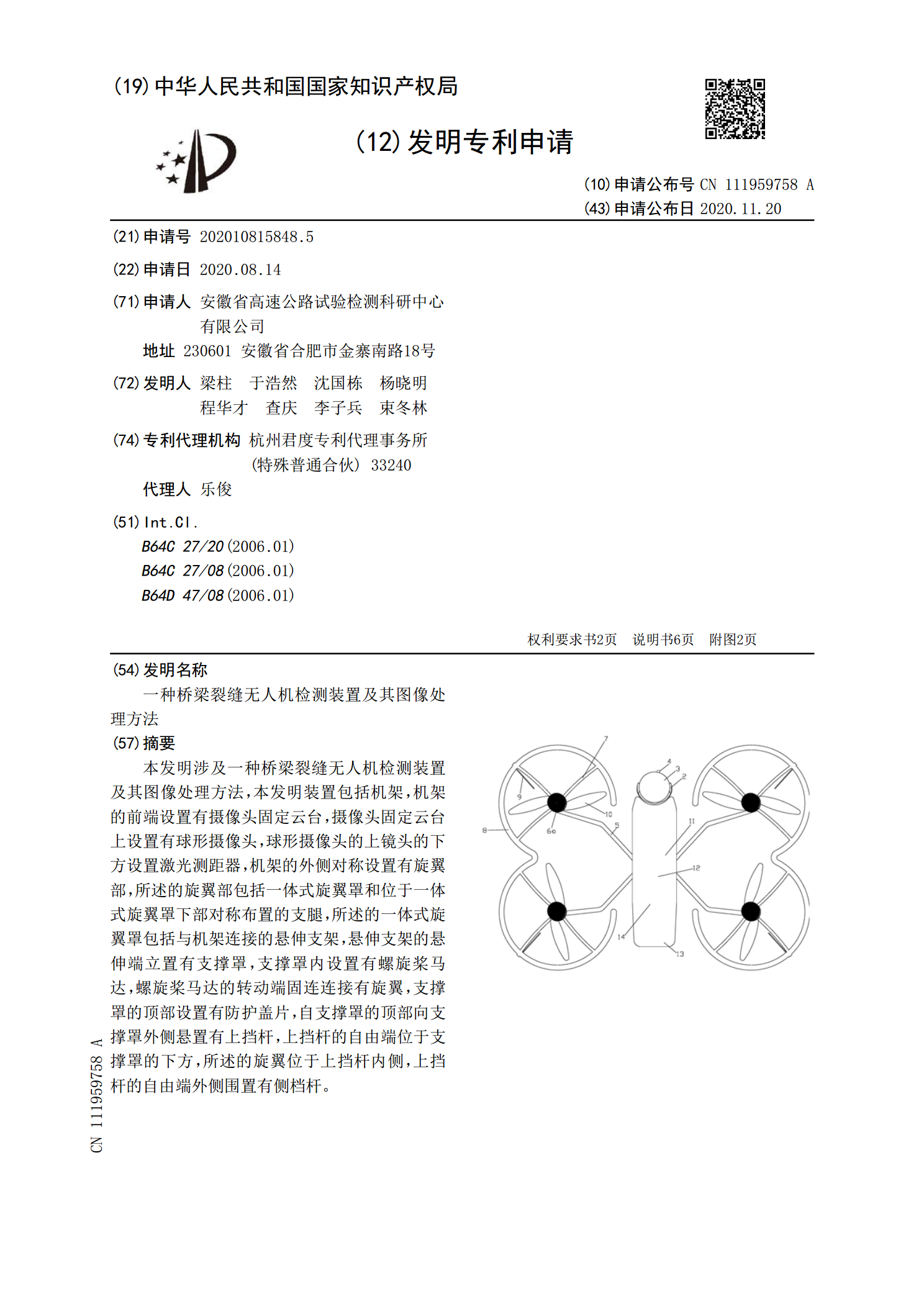
本发明涉及一种桥梁裂缝无人机检测装置及其图像处理方法,本发明装置包括机架,机架的前端设置有摄像头固定云台,摄像头固定云台上设置有球形摄像头,球形摄像头的上镜头的下方设置激光测距器,机架的外侧对称设置有旋翼部,所述的旋翼部包括一体式旋翼罩和位于一体式旋翼罩下部对称布置的支腿,所述的一体式旋翼罩包括与机架连接的悬伸支架,悬伸支架的悬伸端立置有支撑罩,支撑罩内设置有螺旋桨马达,螺旋桨马达的转动端固连连接有旋翼,支撑罩的顶部设置有防护盖片,自支撑罩的顶部向支撑罩外侧悬置有上挡杆,上挡杆的自由端位于支撑罩的下方,所

基于图像处理的混凝土桥梁底面裂缝检测方法的研究.docx
基于图像处理的混凝土桥梁底面裂缝检测方法的研究摘要混凝土桥梁是现代交通工程中非常重要的组成部分,其结构稳定性是安全行驶的基础。然而,混凝土桥梁在使用过程中容易出现底面裂缝的问题,这不仅影响美观,还会对桥梁的结构稳定性带来威胁。因此,本文提出了一种基于图像处理的混凝土桥梁底面裂缝检测方法。该方法通过获取桥梁底面图像,运用图像处理算法进行裂缝检测,提高了检测的准确性和效率。实验证明,该方法具有较高的准确性和实用性,可以为混凝土桥梁的维护保养提供有效的技术手段。关键词:混凝土桥梁,底面裂缝,图像处理,检测方法1

一种无人机用快速检测混凝土裂缝的装置及其检测方法.pdf
本发明公开了一种无人机用快速检测混凝土裂缝的装置及其检测方法,涉及混凝土裂缝检测相关领域,为解决目前装置需要通过吸盘吸附于混凝土表面,再停止无人机的驱动结构,接着进行检测,对于一些表面不平整甚至是弧形的面无法正常吸附,且检测位置缝隙过长时由于无人机停止驱动,无法测量完全;或者检测缝隙贯穿竖直面的弧形面时,无法正常检测的问题。所述固定立管的下端焊接固定有固定盘,所述固定立管外侧面的一侧开设有条形开槽,所述条形开槽内设置有限位齿部,所述固定立管的外部滑动连接有竖向滑动架,所述竖向滑动架上设置有开口,所述竖向滑
无人机及其图像处理装置.pdf
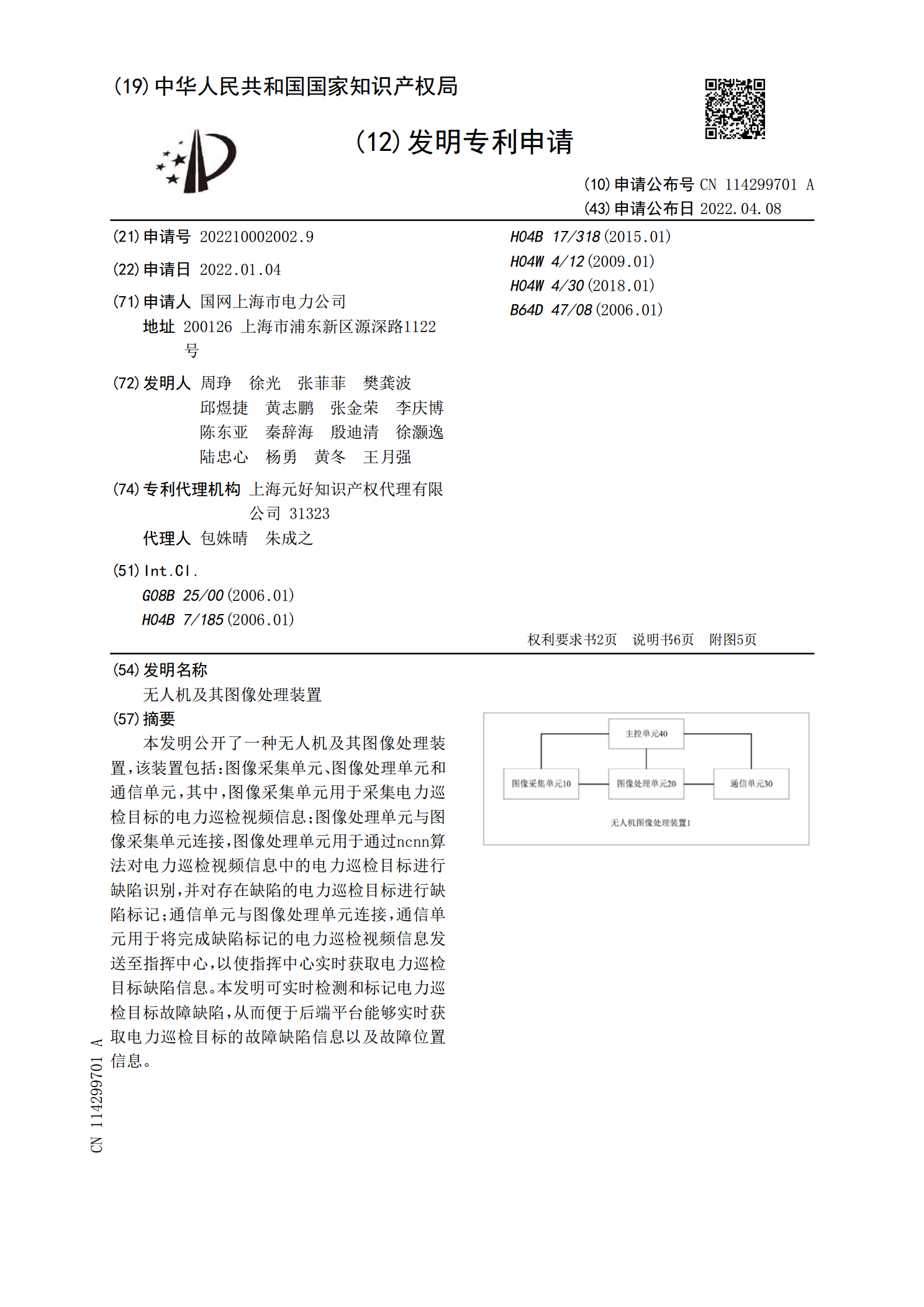
本发明公开了一种无人机及其图像处理装置,该装置包括:图像采集单元、图像处理单元和通信单元,其中,图像采集单元用于采集电力巡检目标的电力巡检视频信息;图像处理单元与图像采集单元连接,图像处理单元用于通过ncnn算法对电力巡检视频信息中的电力巡检目标进行缺陷识别,并对存在缺陷的电力巡检目标进行缺陷标记;通信单元与图像处理单元连接,通信单元用于将完成缺陷标记的电力巡检视频信息发送至指挥中心,以使指挥中心实时获取电力巡检目标缺陷信息。本发明可实时检测和标记电力巡检目标故障缺陷,从而便于后端平台能够实时获取电力巡检

基于图像处理的桥梁底面裂缝检测识别方法研究.docx
基于图像处理的桥梁底面裂缝检测识别方法研究基于图像处理的桥梁底面裂缝检测识别方法研究摘要:随着城市化进程的不断推进,桥梁作为连接道路交通的重要枢纽,扮演着至关重要的角色。然而,桥梁长期承受车辆的重压和自然环境的侵蚀,易产生各种类型的损伤,尤其是底面裂缝。底面裂缝的存在对桥梁结构的稳定性和安全性造成威胁。因此,本文主要研究基于图像处理的桥梁底面裂缝检测识别方法,以提供一种高效和精确的检测手段,保障桥梁的安全运行。关键词:桥梁底面裂缝,图像处理,检测识别,安全运行1.引言桥梁作为道路交通的重要组成部分,具有重