
一种用于机器人自动焊接的双龙门架.pdf

雨星****萌娃


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于机器人自动焊接的双龙门架.pdf
本发明公开了一种用于机器人自动焊接的双龙门架,其结构包括导轨、焊接机构、横梁、滑架、操控机、置物台,导轨连接在置物台上,且滑动配合有滑架,滑架之间安装有横梁,横梁与焊接机构通过操控机采用电性连接的方式相配合,在助力体上设有贯连装置和扶正结构,利用贯连装置和扶正结构在抓钳上相配合,当滑动的固定座上增加横向牵引力时,将会推动抓钳在传递环内通过扶正结构不断滚动靠近套框,借助软条的弹性反弹,反复弹动在贯连装置上,使得贯连装置被拨动延长,从而支持引导着抓钳能聚拢承接在固定座和导轨之间,抵消这之间的横向牵引力,提高该

一种用于窄工位的双梁门架式机器人自动焊接系统.pdf
本发明公开了一种用于窄工位的双梁门架式机器人自动焊接系统,包括钢质双梁门架外部轴系统、机器人焊接系统和焊烟处理系统;钢质双梁门架外部轴系统上设置有机器人焊接系统和焊烟处理系统,焊烟处理系统设置于机器人焊接系统上,钢质双梁门架外部轴系统用以移动机器人焊接系统对待焊接物开展焊接,机器人焊接系统通过焊接机器人执行焊接,焊烟处理系统对机器人焊接系统在焊接过程中产生的烟雾灰尘吸收处理。本发明适用于大型结构件的机器人自动焊接需求,通过门架式外部轴辅助运动,工业相机识别焊缝类别、焊件位置,焊接机器人依据既定的焊接作业进
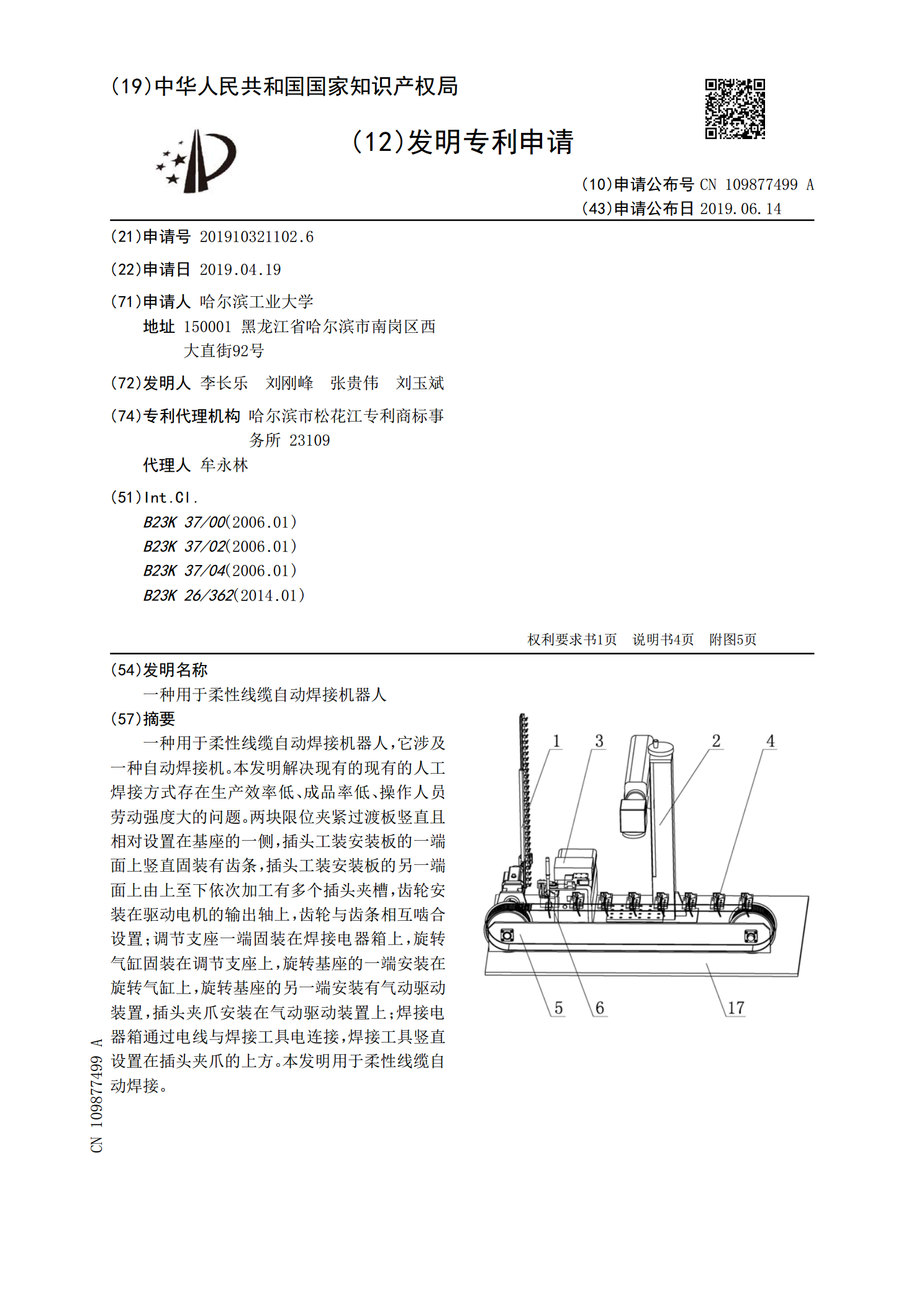
一种用于柔性线缆自动焊接机器人.pdf
一种用于柔性线缆自动焊接机器人,它涉及一种自动焊接机。本发明解决现有的现有的人工焊接方式存在生产效率低、成品率低、操作人员劳动强度大的问题。两块限位夹紧过渡板竖直且相对设置在基座的一侧,插头工装安装板的一端面上竖直固装有齿条,插头工装安装板的另一端面上由上至下依次加工有多个插头夹槽,齿轮安装在驱动电机的输出轴上,齿轮与齿条相互啮合设置;调节支座一端固装在焊接电器箱上,旋转气缸固装在调节支座上,旋转基座的一端安装在旋转气缸上,旋转基座的另一端安装有气动驱动装置,插头夹爪安装在气动驱动装置上;焊接电器箱通过电
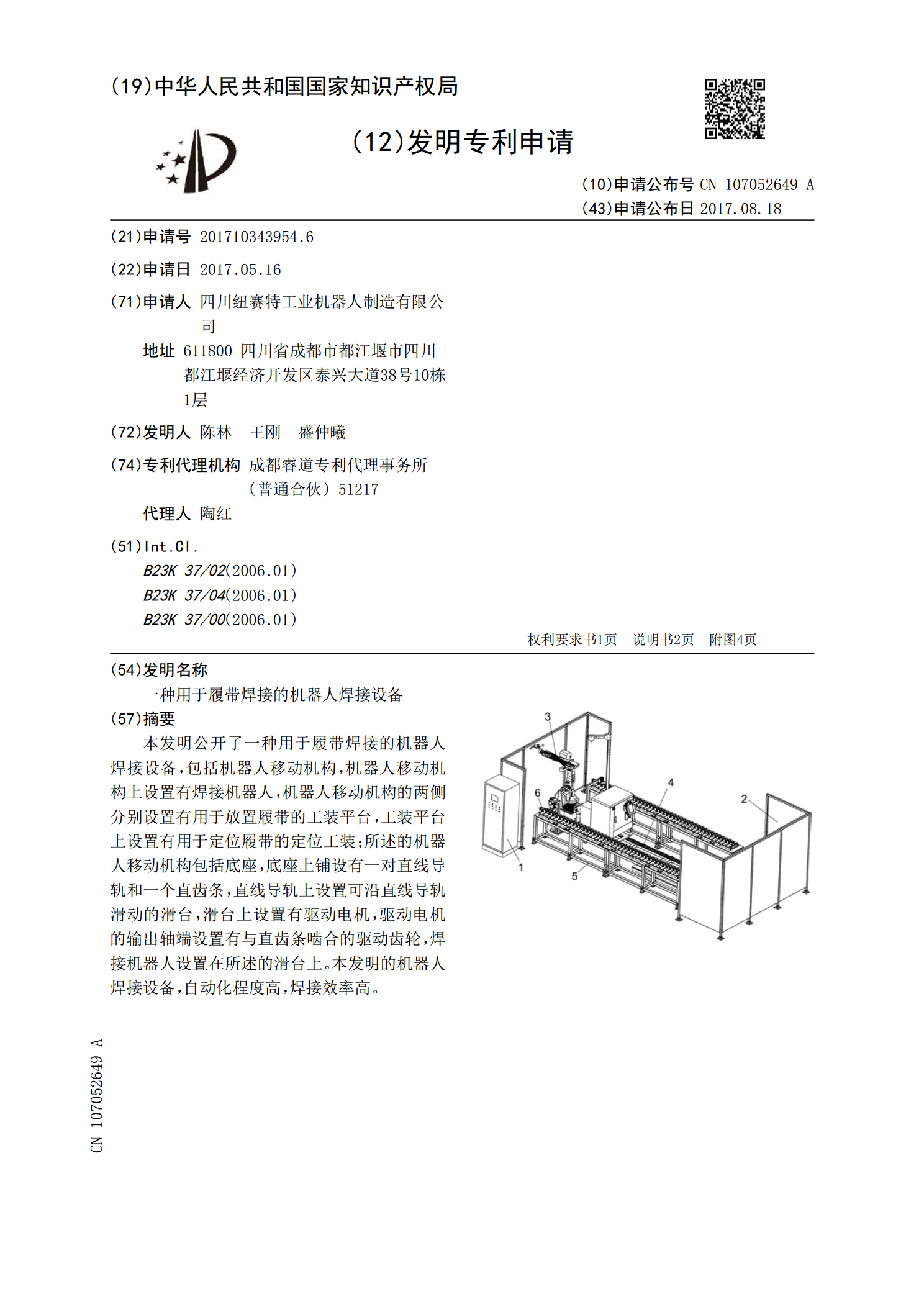
一种用于履带焊接的机器人焊接设备.pdf
本发明公开了一种用于履带焊接的机器人焊接设备,包括机器人移动机构,机器人移动机构上设置有焊接机器人,机器人移动机构的两侧分别设置有用于放置履带的工装平台,工装平台上设置有用于定位履带的定位工装;所述的机器人移动机构包括底座,底座上铺设有一对直线导轨和一个直齿条,直线导轨上设置可沿直线导轨滑动的滑台,滑台上设置有驱动电机,驱动电机的输出轴端设置有与直齿条啮合的驱动齿轮,焊接机器人设置在所述的滑台上。本发明的机器人焊接设备,自动化程度高,焊接效率高。

一种用于焊接机器人执行末端的双枪枪头.pdf
本实用新型公开了一种用于焊接机器人执行末端的双枪枪头,属于焊接机器人技术领域,包括联轴器,所述联轴器的下端设置有防撞器,所述防撞器的下端设置有防撞器连接块,所述防撞器连接块的侧边设置有长条侧板,所述长条侧板的下端设置有焊枪夹持块一,所述焊枪夹持块一的侧边设置有压盖一,所述焊枪夹持块一与压盖一之间设置有焊枪,本实用新型采用联轴器连接防撞器,在通过防撞器固定双枪的调节机构,利用调节机构对焊道间距进行调节,两种结构的双枪枪头机构具有造价低、机构简单、自动调节、稳定性好,精度高、双枪同时工作等特点,可根据设备不同