
基于CCD传感器的智能寻迹模型车的研究与实现.pdf

qw****27

1/9
2/9

3/9

4/9
5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于CCD传感器的智能寻迹模型车的研究与实现.pdf
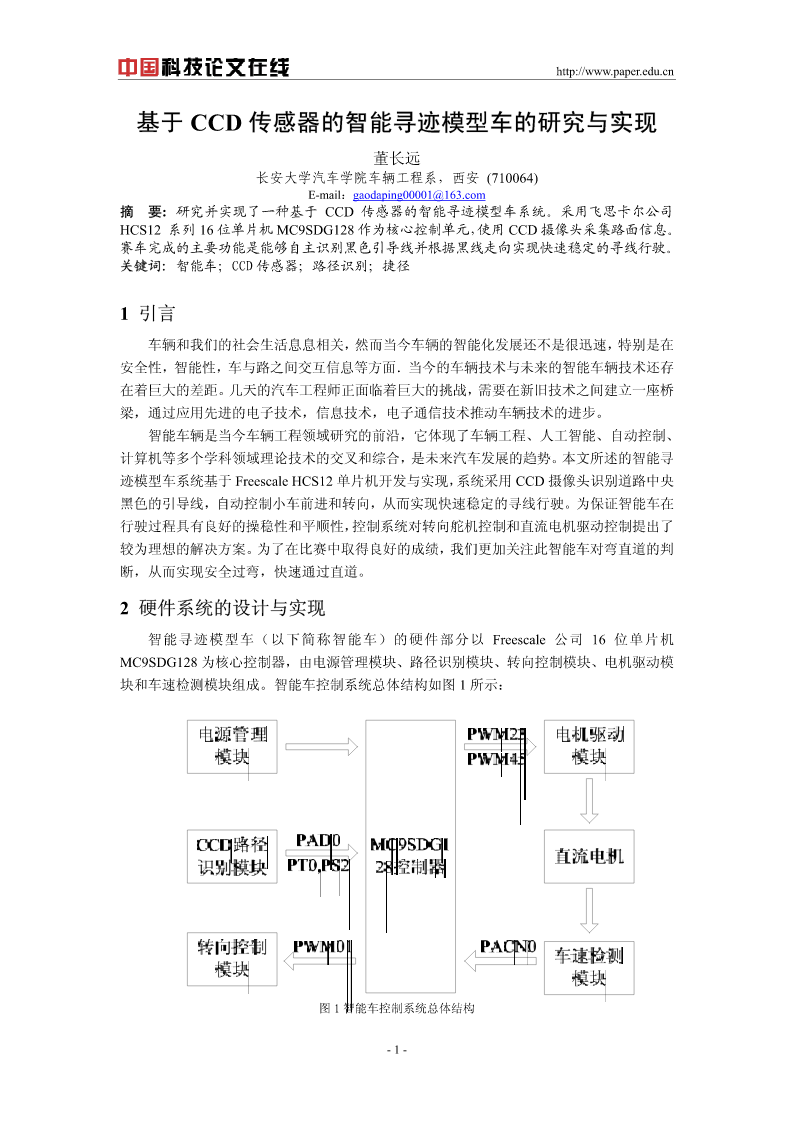
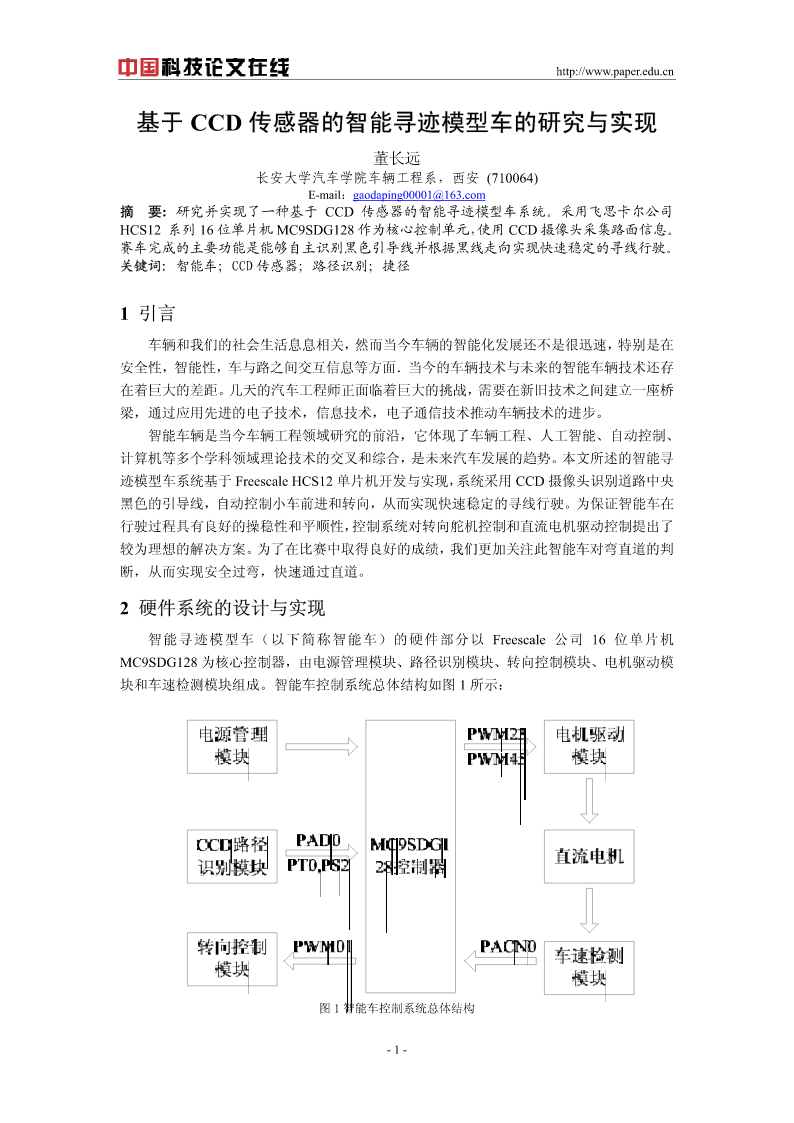
http://www.paper.edu.cn基于CCD传感器的智能寻迹模型车的研究与实现董长远长安大学汽车学院车辆工程系,西安(710064)E-mail:gaodaping00001@163.com摘要:研究并实现了一种基于CCD传感器的智能寻迹模型车系统。采用飞思卡尔公司HCS12系列16位单片机MC9SDG128作为核心控制单元,使用CCD摄像头采集路面信息。赛车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。关键词:智能车;CCD传感器;路径识别;捷径1引言车辆和我们
片机的智能寻迹模型车的设计与实现.pdf
出薹三睁愿升竺基于HCS2单片机的智能寻迹模型车的设计与实现1SCM1坠型堡堡E;i了孑计算机工程与设计‘毅,杨天DesignandimplementationoftrackmodelbasedCCD路径I!垒竺..第29卷第18期2008年9月韩(长安大学汽车学院车辆工程系,陕西西安710064)intelligent-searchingHCSl2(School710064,China)0引言1硬件系统的设计与实现1.2电源管理模块摘要:设计并实现了一种基于HCSl2单片机的智能寻迹模型车系统。采用飞思
基于HCS12单片机的智能寻迹模型车的设计与实现.pdf
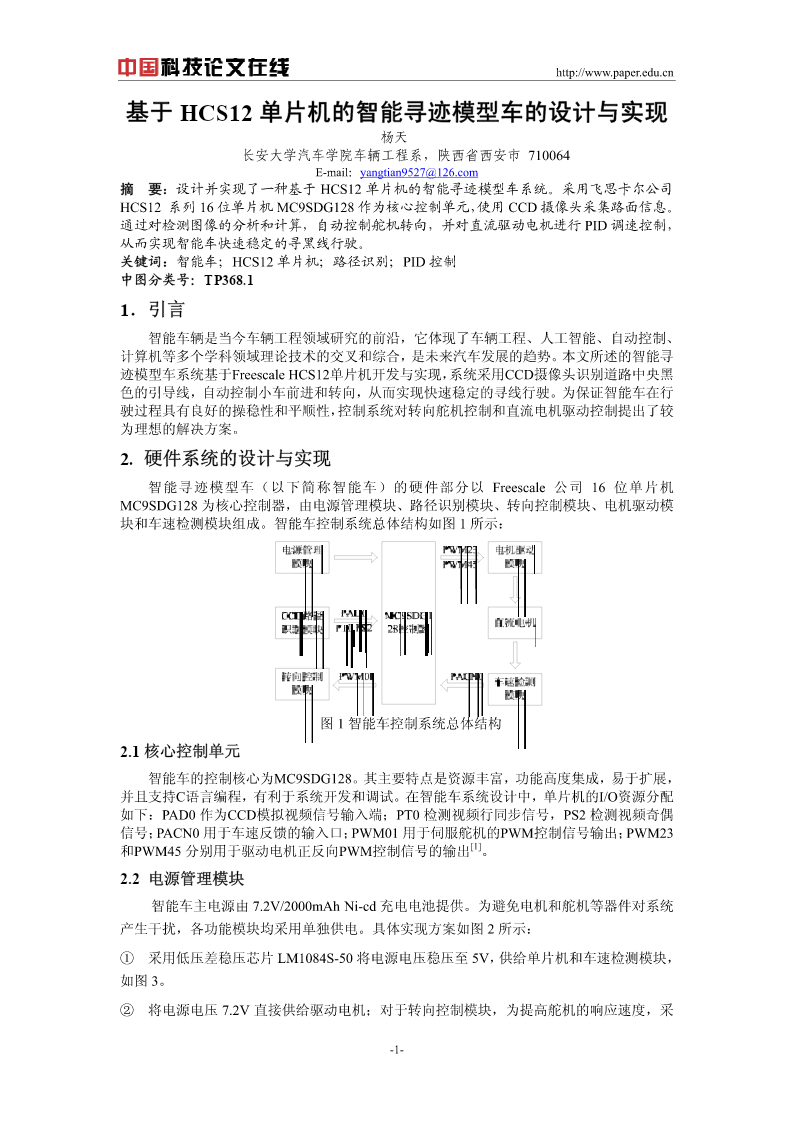
http://www.paper.edu.cn基于HCS12单片机的智能寻迹模型车的设计与实现杨天1.长安大学汽车学院车辆工程系,陕西省西安市710064E-mail:yangtian9527@126.com摘要:设计并实现了一种基于HCS12单片机的智能寻迹模型车系统。采用飞思卡尔公司HCS12系列16位单片机MC9SDG128作为核心控制单元,使用CCD摄像头采集路面信息。通过对检测图像的分析和计算,自动控制舵机转向,并对直流驱动电机进行PID调速控制,从而实现智能车快速稳定的寻黑线行驶。关键词:智能

基于红外传感器的智能寻迹赛车的设计与实现.docx
基于红外传感器的智能寻迹赛车的设计与实现论文:基于红外传感器的智能寻迹赛车的设计与实现摘要:智能寻迹赛车是一种基于红外传感技术的智能化汽车,具有自主完成赛道跟踪的能力。本文通过设计与实现一辆智能寻迹赛车,并阐述了其原理以及实现过程。对比传统赛车,智能寻迹赛车不需要人为控制,而可以自主性地完成一定的运行任务,降低了对人力资源的依赖,并为未来智能汽车的发展打下基础。关键词:智能寻迹赛车、红外传感器、自主化、原理、实现过程1.引言汽车技术的发展日新月异,智能化汽车的出现彻底改变了传统的驾驶方式。首先,它拥有高速

基于光电传感器寻迹智能车的研究.doc
基于光电传感器寻迹智能车的研究摘要随着近年来智能化交通工具被广泛使用智能汽车的设计和开发将从根本上改变现有汽车的信息采集处理、数据交换、行车导航与定位、车辆控制的技术方案与体系结构。本文提出并设计了一种基于Freescale公司HCS12单片机系列设计的无人控制式智能车系统模型主要论述了采用MC9SXS128单片机控制通过光电效应识别有黑色引导线白色路径的道路方案能够过最小曲率半径50厘米的小弯同时采取减速策略同时在过波浪弯的情况下使车尽可能的稳定智能识别十字交叉黑线在直道上采用加速策略。全文由