
基于红外传感器的智能寻迹赛车的设计与实现.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于红外传感器的智能寻迹赛车的设计与实现.docx
基于红外传感器的智能寻迹赛车的设计与实现论文:基于红外传感器的智能寻迹赛车的设计与实现摘要:智能寻迹赛车是一种基于红外传感技术的智能化汽车,具有自主完成赛道跟踪的能力。本文通过设计与实现一辆智能寻迹赛车,并阐述了其原理以及实现过程。对比传统赛车,智能寻迹赛车不需要人为控制,而可以自主性地完成一定的运行任务,降低了对人力资源的依赖,并为未来智能汽车的发展打下基础。关键词:智能寻迹赛车、红外传感器、自主化、原理、实现过程1.引言汽车技术的发展日新月异,智能化汽车的出现彻底改变了传统的驾驶方式。首先,它拥有高速

基于红外光电传感器的智能车自动寻迹系统设计.pdf
SEMICONDUCTOROPTOELECTRONICSVol.30No.1Feb.2009光电技术应用基于红外光电传感器的智能车自动寻迹系统设计高月华(重庆科技学院机械工程系,重庆400042)摘要:介绍了一种自动寻迹智能车的设计,研究了采用红外反射式光电传感器作为路径采集模块实现自动寻迹的软硬件设计方法。系统采用Freescale16位单片机MC9S12DG128为核心控制器,利用11个红外光电传感器构成的光电传感器阵列采集路面信息,单片机获得传感器采集的路面信息和车速信息,经过分析后控制智能车的舵机

基于红外光电传感器的智能车自动寻迹系统设计.docx
基于红外光电传感器的智能车自动寻迹系统设计随着科技的不断进步,智能化技术在各个领域都得到了广泛应用。在交通工具领域,智能汽车是未来发展方向之一。智能汽车的其中一个重要应用就是自动寻迹。本文将介绍一个基于红外光电传感器的智能车自动寻迹系统的设计。一、系统设计这个智能车自动寻迹系统的硬件主要由红外光电传感器、直流电机、电池、Arduino开发板等组成。其中红外光电传感器是核心制导部件,可以实时检测车身所走的路径,控制车身的移动方向。Arduino开发板则是控制中心,能够接收来自红外光电传感器的信号,根据信号控

基于视觉的智能寻迹车设计与实现.docx
基于视觉的智能寻迹车设计与实现随着无人驾驶技术的不断发展,视觉智能寻迹车成为了研究的热点。本文将介绍基于视觉的智能寻迹车的设计与实现。一、研究背景视觉智能寻迹车是一种利用摄像机等传感器进行图像识别,从而实现自主行驶的技术。其中,图像识别技术是视觉智能寻迹车的核心技术。随着机器学习、深度学习、神经网络等技术的不断发展,视觉智能寻迹车的控制精度和可靠性不断提高。因此,基于视觉的智能寻迹车逐渐成为了当今研究的热点。二、设计思路视觉智能寻迹车的设计主要分为以下几个步骤:1.选用合适的硬件平台硬件平台是视觉智能寻迹
基于CCD传感器的智能寻迹模型车的研究与实现.pdf
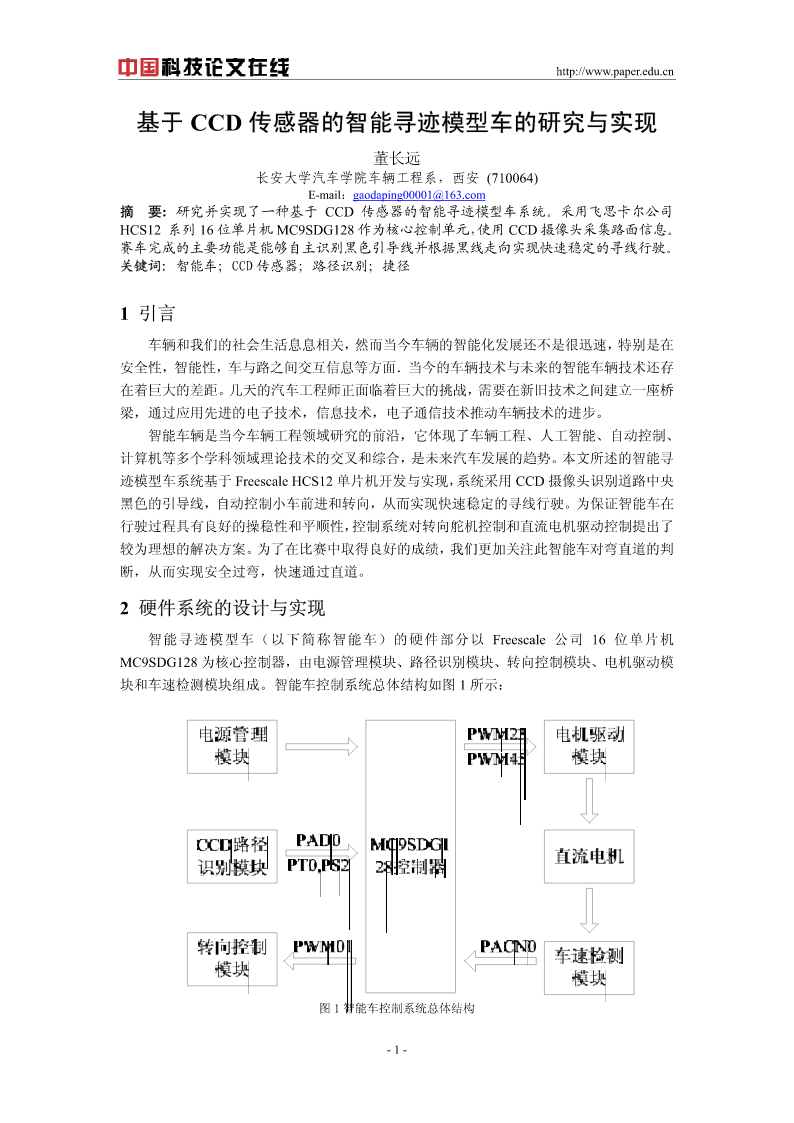
http://www.paper.edu.cn基于CCD传感器的智能寻迹模型车的研究与实现董长远长安大学汽车学院车辆工程系,西安(710064)E-mail:gaodaping00001@163.com摘要:研究并实现了一种基于CCD传感器的智能寻迹模型车系统。采用飞思卡尔公司HCS12系列16位单片机MC9SDG128作为核心控制单元,使用CCD摄像头采集路面信息。赛车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。关键词:智能车;CCD传感器;路径识别;捷径1引言车辆和我们