
片机的智能寻迹模型车的设计与实现.pdf

as****16

1/6
2/6

3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
片机的智能寻迹模型车的设计与实现.pdf
出薹三睁愿升竺基于HCS2单片机的智能寻迹模型车的设计与实现1SCM1坠型堡堡E;i了孑计算机工程与设计‘毅,杨天DesignandimplementationoftrackmodelbasedCCD路径I!垒竺..第29卷第18期2008年9月韩(长安大学汽车学院车辆工程系,陕西西安710064)intelligent-searchingHCSl2(School710064,China)0引言1硬件系统的设计与实现1.2电源管理模块摘要:设计并实现了一种基于HCSl2单片机的智能寻迹模型车系统。采用飞思
基于HCS12单片机的智能寻迹模型车的设计与实现.pdf
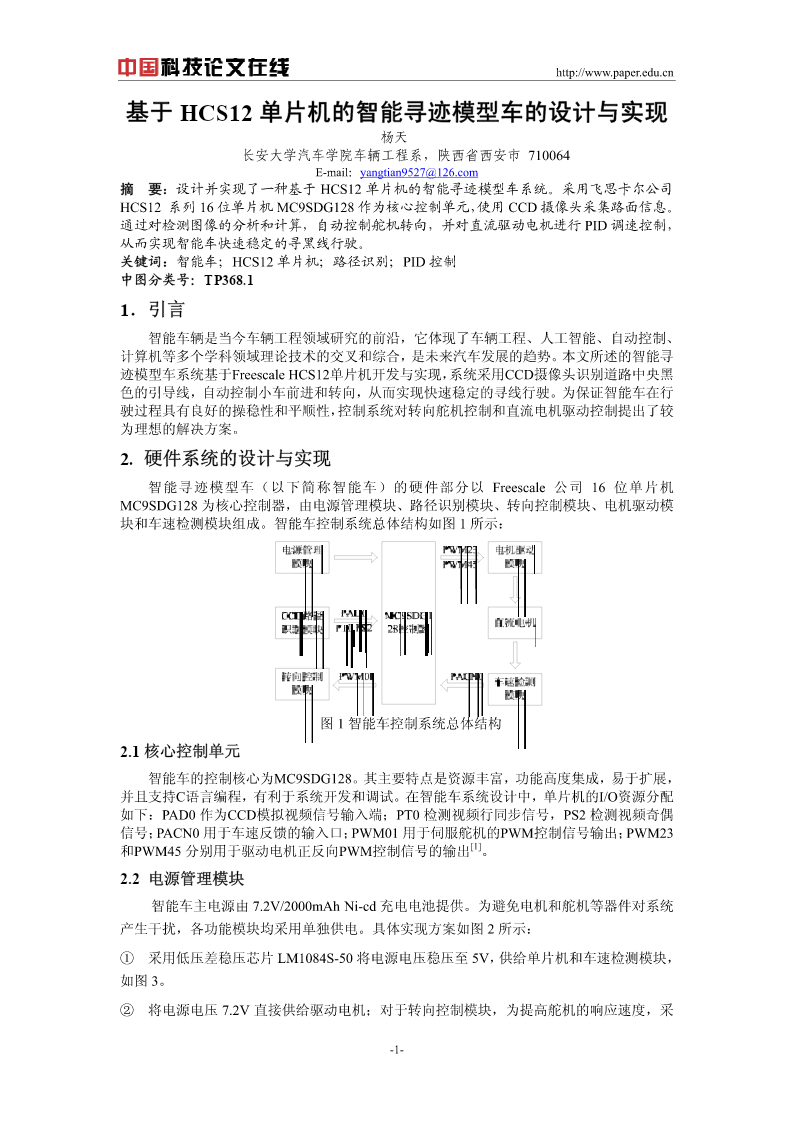
http://www.paper.edu.cn基于HCS12单片机的智能寻迹模型车的设计与实现杨天1.长安大学汽车学院车辆工程系,陕西省西安市710064E-mail:yangtian9527@126.com摘要:设计并实现了一种基于HCS12单片机的智能寻迹模型车系统。采用飞思卡尔公司HCS12系列16位单片机MC9SDG128作为核心控制单元,使用CCD摄像头采集路面信息。通过对检测图像的分析和计算,自动控制舵机转向,并对直流驱动电机进行PID调速控制,从而实现智能车快速稳定的寻黑线行驶。关键词:智能
基于CCD传感器的智能寻迹模型车的研究与实现.pdf
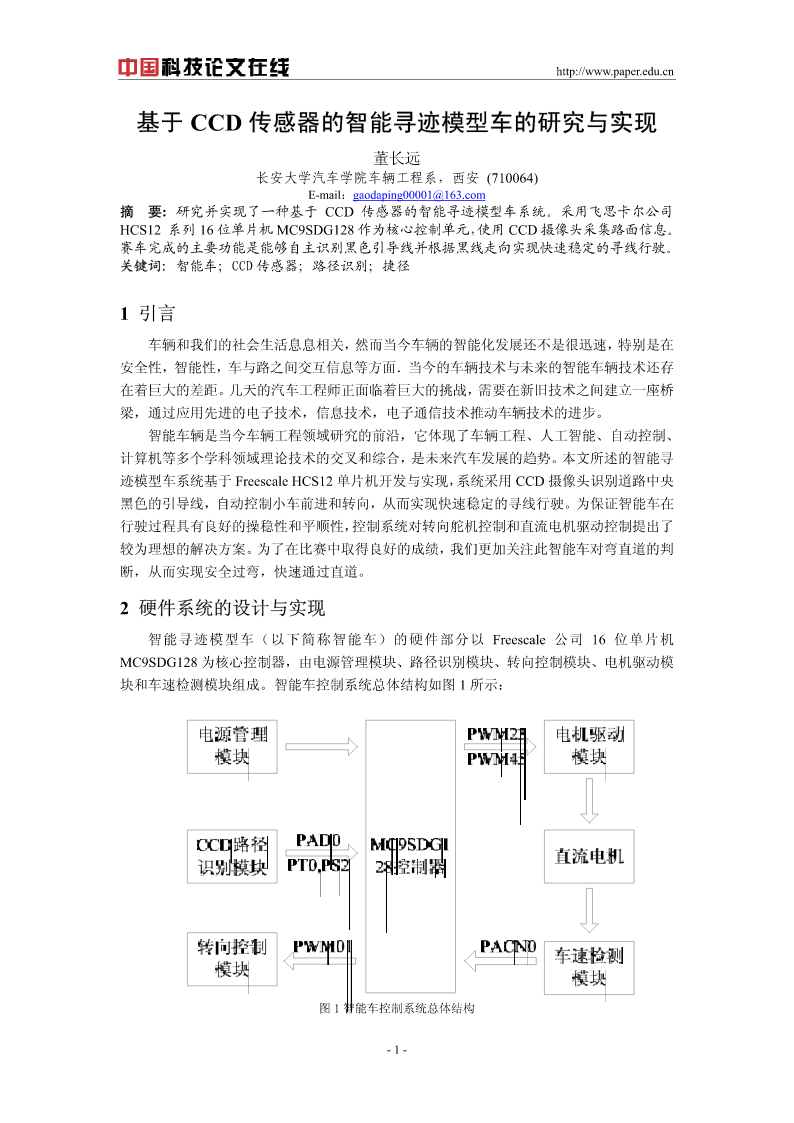
http://www.paper.edu.cn基于CCD传感器的智能寻迹模型车的研究与实现董长远长安大学汽车学院车辆工程系,西安(710064)E-mail:gaodaping00001@163.com摘要:研究并实现了一种基于CCD传感器的智能寻迹模型车系统。采用飞思卡尔公司HCS12系列16位单片机MC9SDG128作为核心控制单元,使用CCD摄像头采集路面信息。赛车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。关键词:智能车;CCD传感器;路径识别;捷径1引言车辆和我们
基于瑞萨单片机的智能模型车设计与实现.pdf
万方数据受引::=:::b需基于瑞萨单片机的智能模型车设计与实现ModelMicrocomputerImplementationDesignandofCarBasedRenesasSingleChipL————一计算机工程·工程应用技术与实现·Intelligent1概述2硬件系统设计第37卷第10期2011年5月May韩毅L2,甄娜1,张伟方1Wei·fan91Energy,Tsinihua智能汽车作为一种高新技术密集的新型产品,涉及到智能自动化技术、微电子技术、通信技术等各个领域,智能模型车是未来智能

课程设计智能寻迹小车设计与实现.doc
目录目录I智能寻迹小车设计与实现ISmartCarDesignandImplementationofTractingII第1章绪论1第2章系统的硬件及设计原理32.1STC89C52单片机32.1.1STC89C52管脚功能32.1.2复位82.2光电电路概况92.2.1防撞92.2.2寻迹92.3显示电路92.3.1数码管92.3.2发光二极管102.4电机控制电路102.4.1电机的选择方案102.5声控122.6串口通信12第3章系统软件设计133.1总体设计方案和框图13第4章安装调试214.1焊