
AGV小车.pdf

17****27

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
AGV底盘及AGV小车.pdf
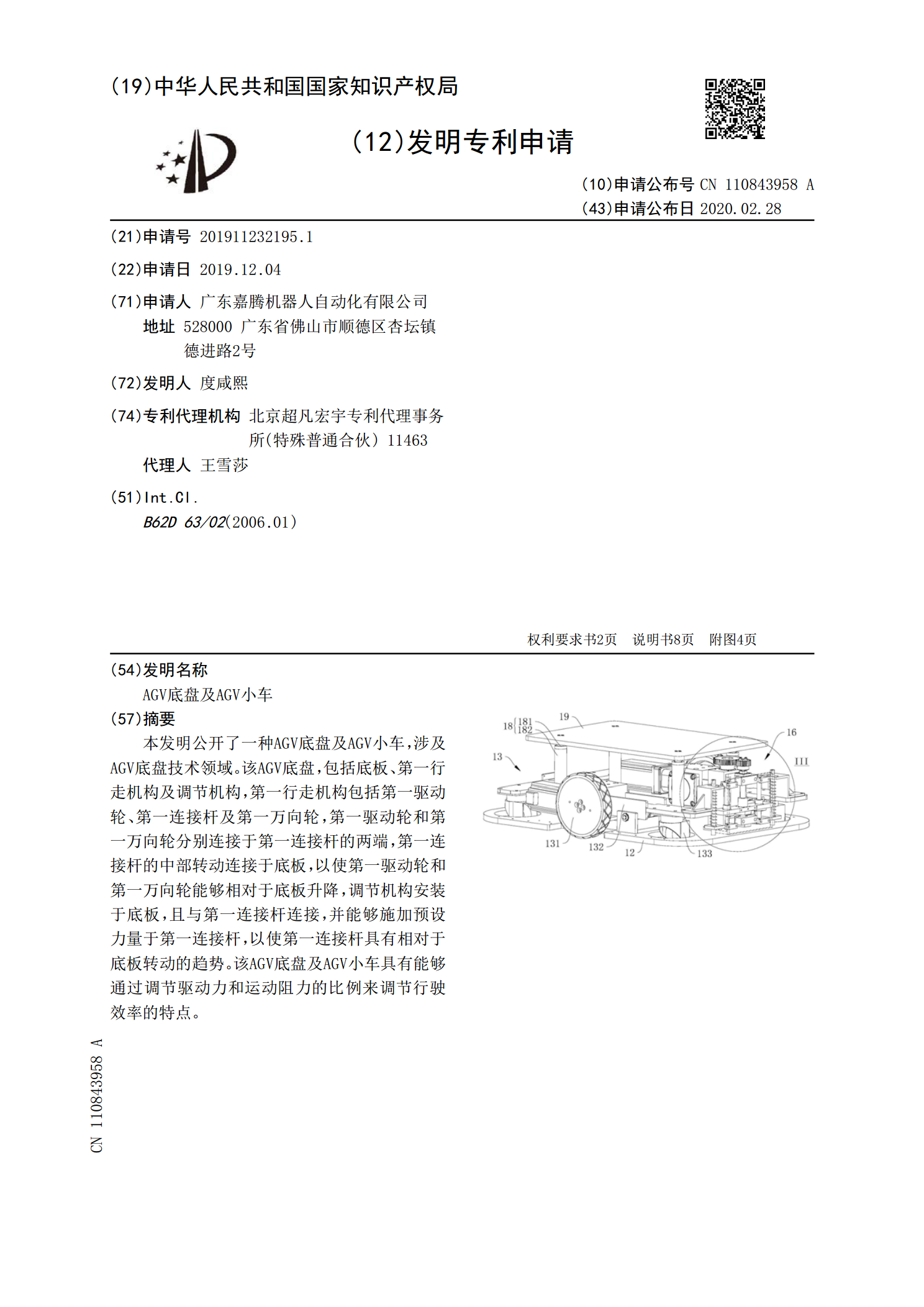
本发明公开了一种AGV底盘及AGV小车,涉及AGV底盘技术领域。该AGV底盘,包括底板、第一行走机构及调节机构,第一行走机构包括第一驱动轮、第一连接杆及第一万向轮,第一驱动轮和第一万向轮分别连接于第一连接杆的两端,第一连接杆的中部转动连接于底板,以使第一驱动轮和第一万向轮能够相对于底板升降,调节机构安装于底板,且与第一连接杆连接,并能够施加预设力量于第一连接杆,以使第一连接杆具有相对于底板转动的趋势。该AGV底盘及AGV小车具有能够通过调节驱动力和运动阻力的比例来调节行驶效率的特点。
AGV小车.pdf
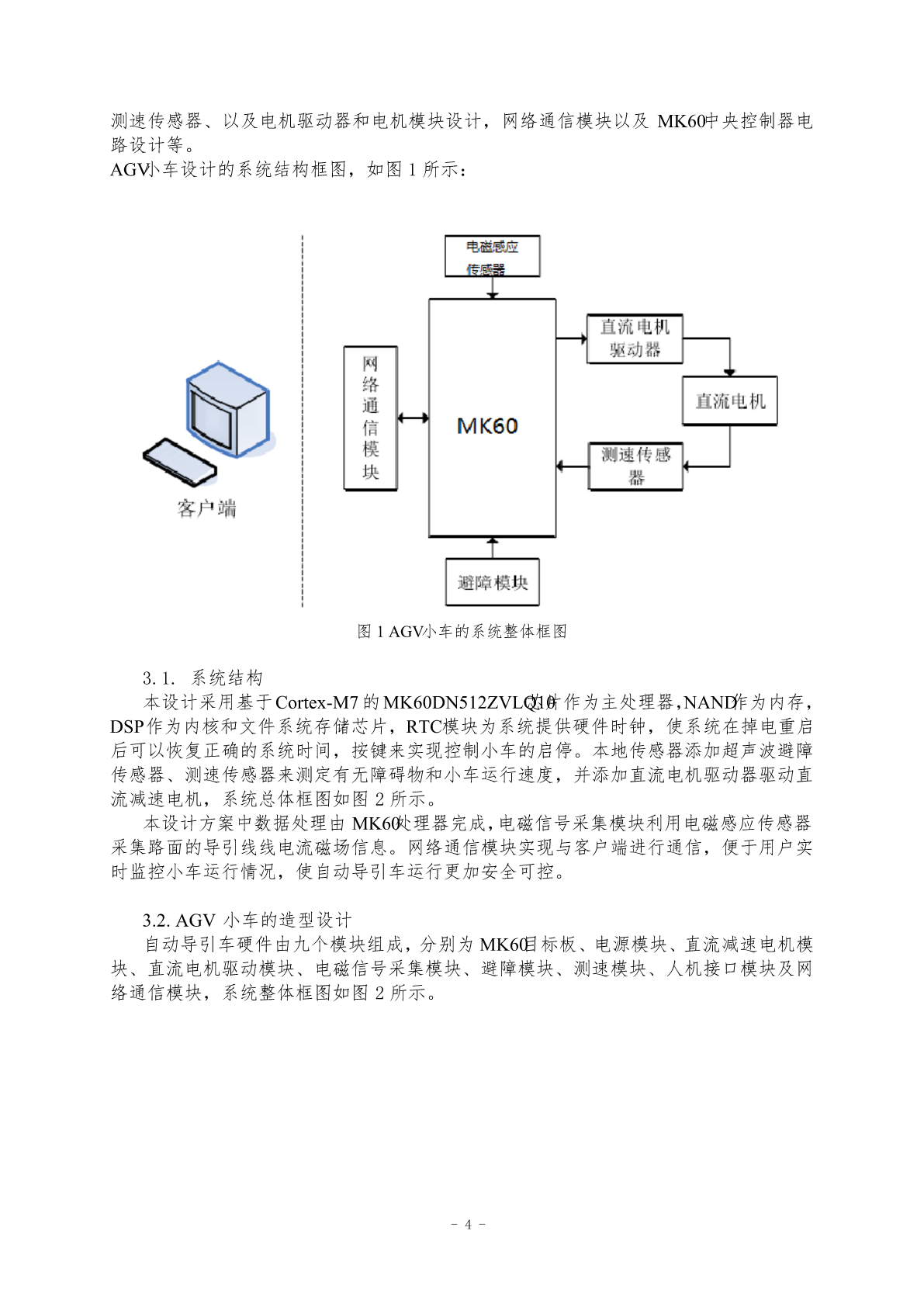
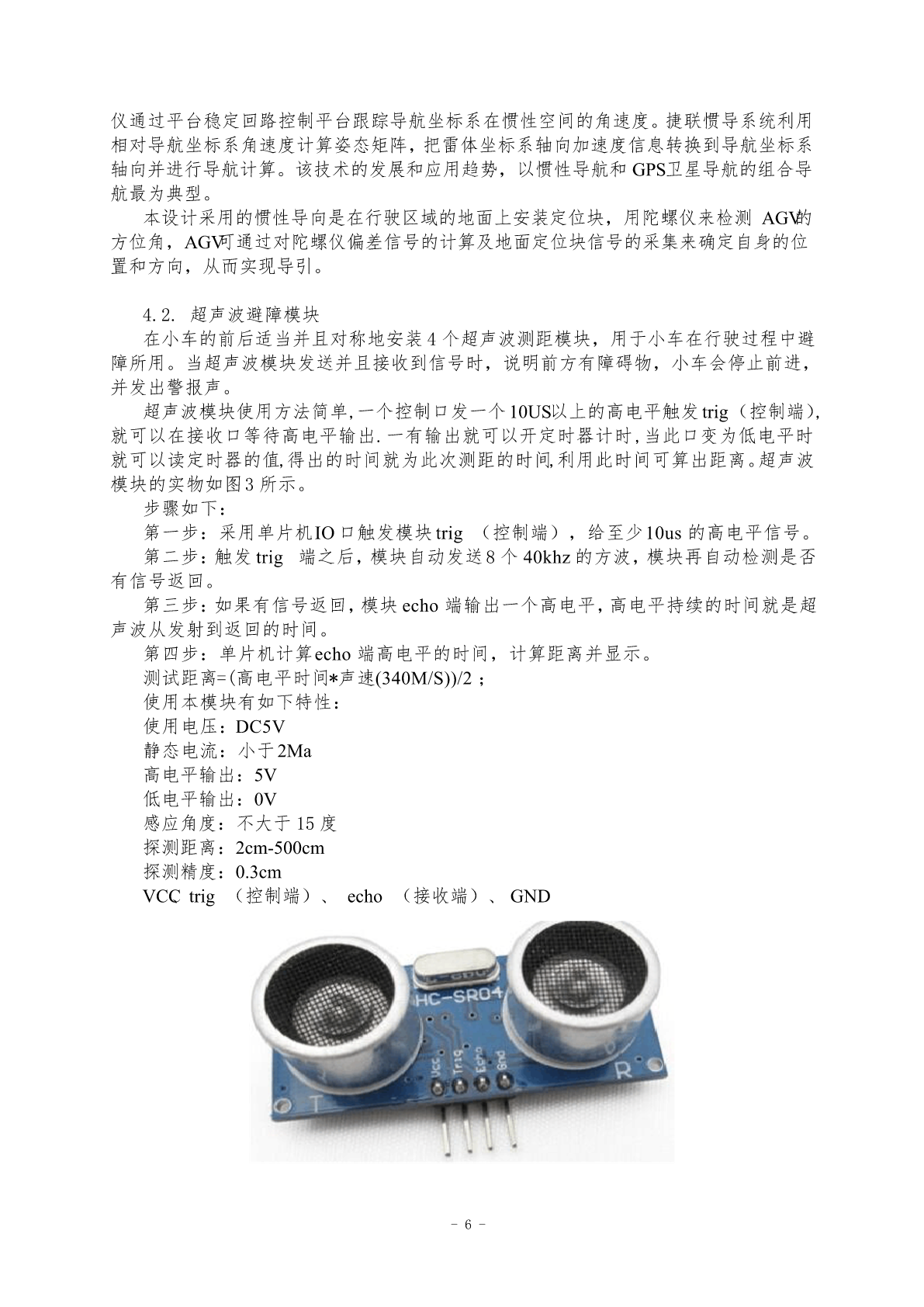
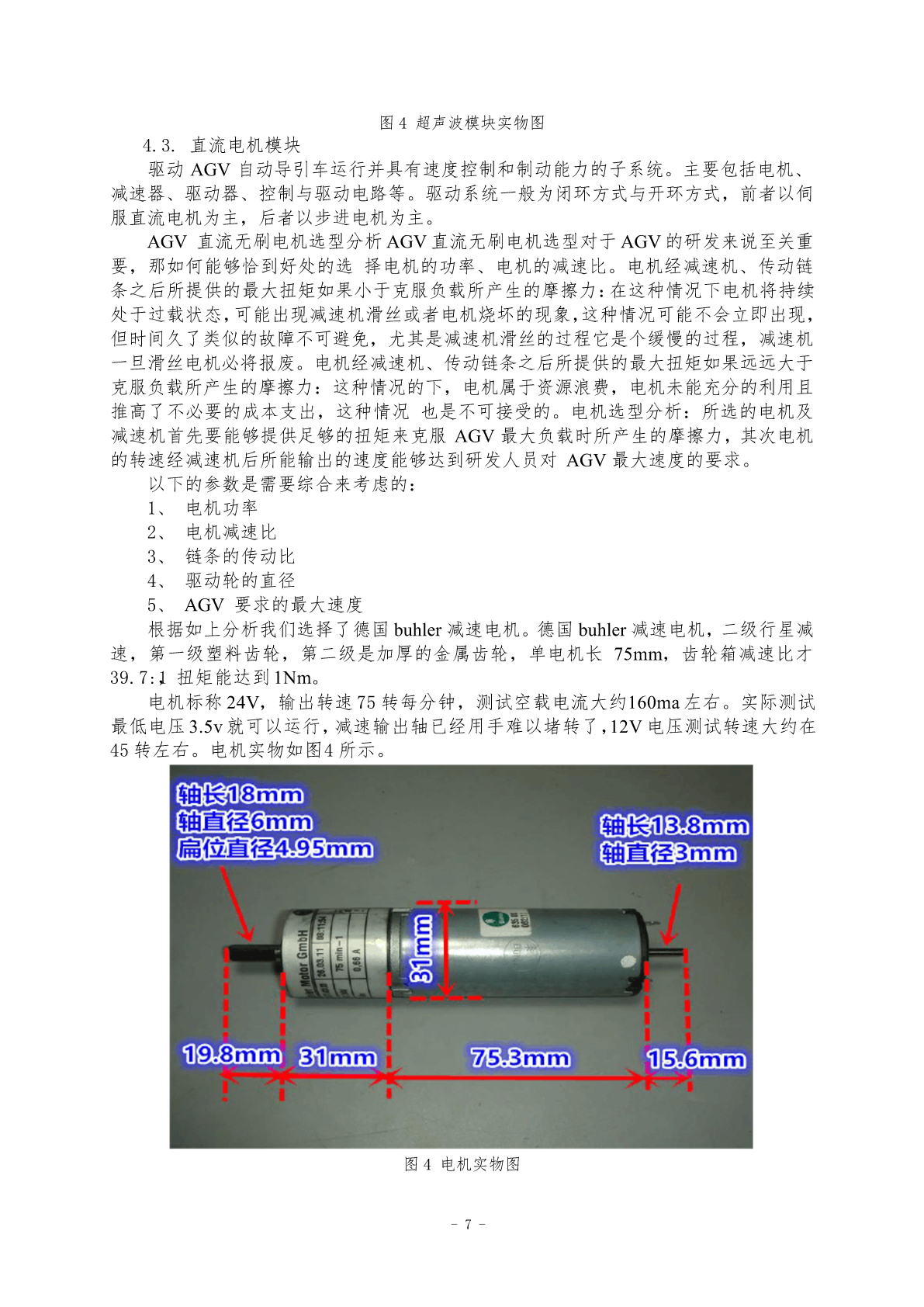
五邑大学《机器人》课程设计报告题目:基于嵌入式系统的AGV小车设计院系信息工程学院专业自动化学号**********学生姓名彭学良指导教师黄辉考核成绩目录摘要.........................................................................................................................................................................21.引言..
AGV小车.pdf
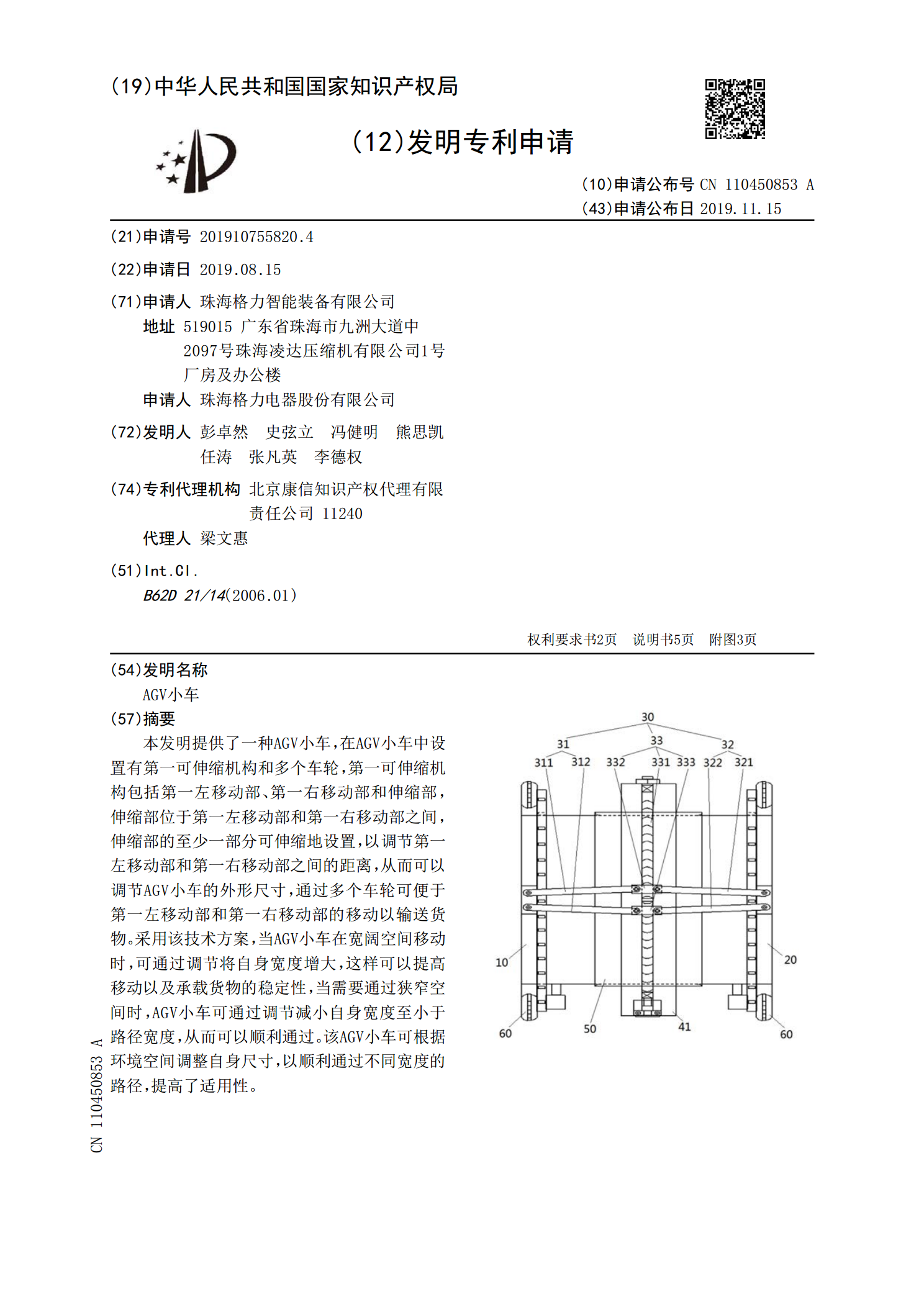
本发明提供了一种AGV小车,在AGV小车中设置有第一可伸缩机构和多个车轮,第一可伸缩机构包括第一左移动部、第一右移动部和伸缩部,伸缩部位于第一左移动部和第一右移动部之间,伸缩部的至少一部分可伸缩地设置,以调节第一左移动部和第一右移动部之间的距离,从而可以调节AGV小车的外形尺寸,通过多个车轮可便于第一左移动部和第一右移动部的移动以输送货物。采用该技术方案,当AGV小车在宽阔空间移动时,可通过调节将自身宽度增大,这样可以提高移动以及承载货物的稳定性,当需要通过狭窄空间时,AGV小车可通过调节减小自身宽度至小

AGV小车.pdf
本发明涉及仓储物流运输领域,公开了一种AGV小车,包括底盘、设于所述底盘上的升降总成、驱动总成以及行走总成;所述升降总成包括动力输出装置、动力传递轴以及多个蜗轮蜗杆升降机构,多个所述蜗轮蜗杆升降机构沿所述底盘的长度方向间隔布置,且位于所述底盘相对的两侧,且位于同一侧的相邻的两个蜗轮蜗杆升降机构的动力输入端通过所述动力传递轴连接,所述动力输出装置通过所述动力传递轴驱动所述蜗轮蜗杆升降机构运动。本发明的AGV小车,其升降总成采用蜗轮蜗杆升降机构作为升降物体的升降结构,蜗轮蜗杆升降机构具有结构紧凑、占用空间小的
一种AGV小车换向结构及AGV小车.pdf
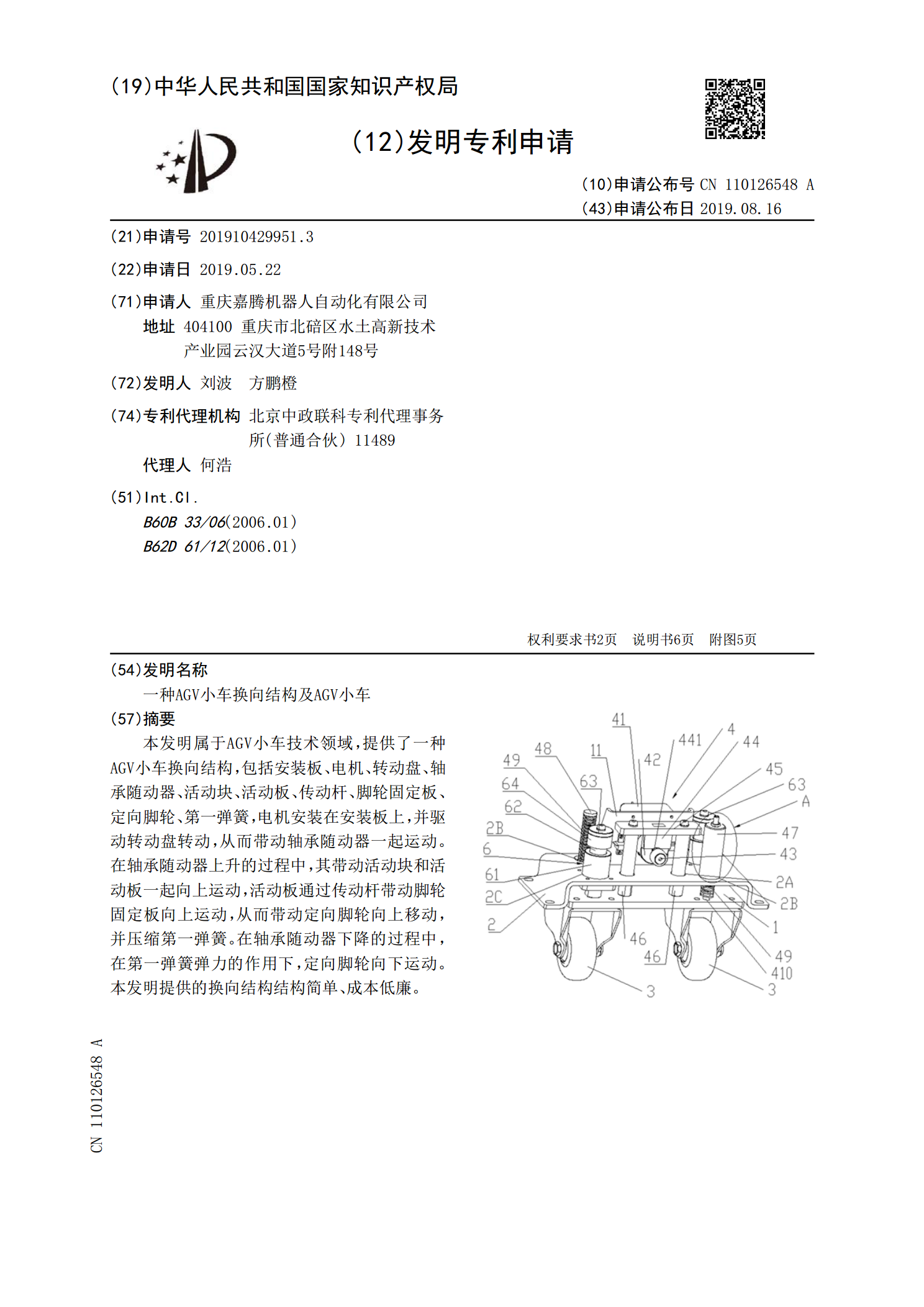
本发明属于AGV小车技术领域,提供了一种AGV小车换向结构,包括安装板、电机、转动盘、轴承随动器、活动块、活动板、传动杆、脚轮固定板、定向脚轮、第一弹簧,电机安装在安装板上,并驱动转动盘转动,从而带动轴承随动器一起运动。在轴承随动器上升的过程中,其带动活动块和活动板一起向上运动,活动板通过传动杆带动脚轮固定板向上运动,从而带动定向脚轮向上移动,并压缩第一弹簧。在轴承随动器下降的过程中,在第一弹簧弹力的作用下,定向脚轮向下运动。本发明提供的换向结构结构简单、成本低廉。