
煤矿巡检机器人集群任务调度系统及方法.pdf

一条****彩妍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
煤矿巡检机器人集群任务调度系统及方法.pdf
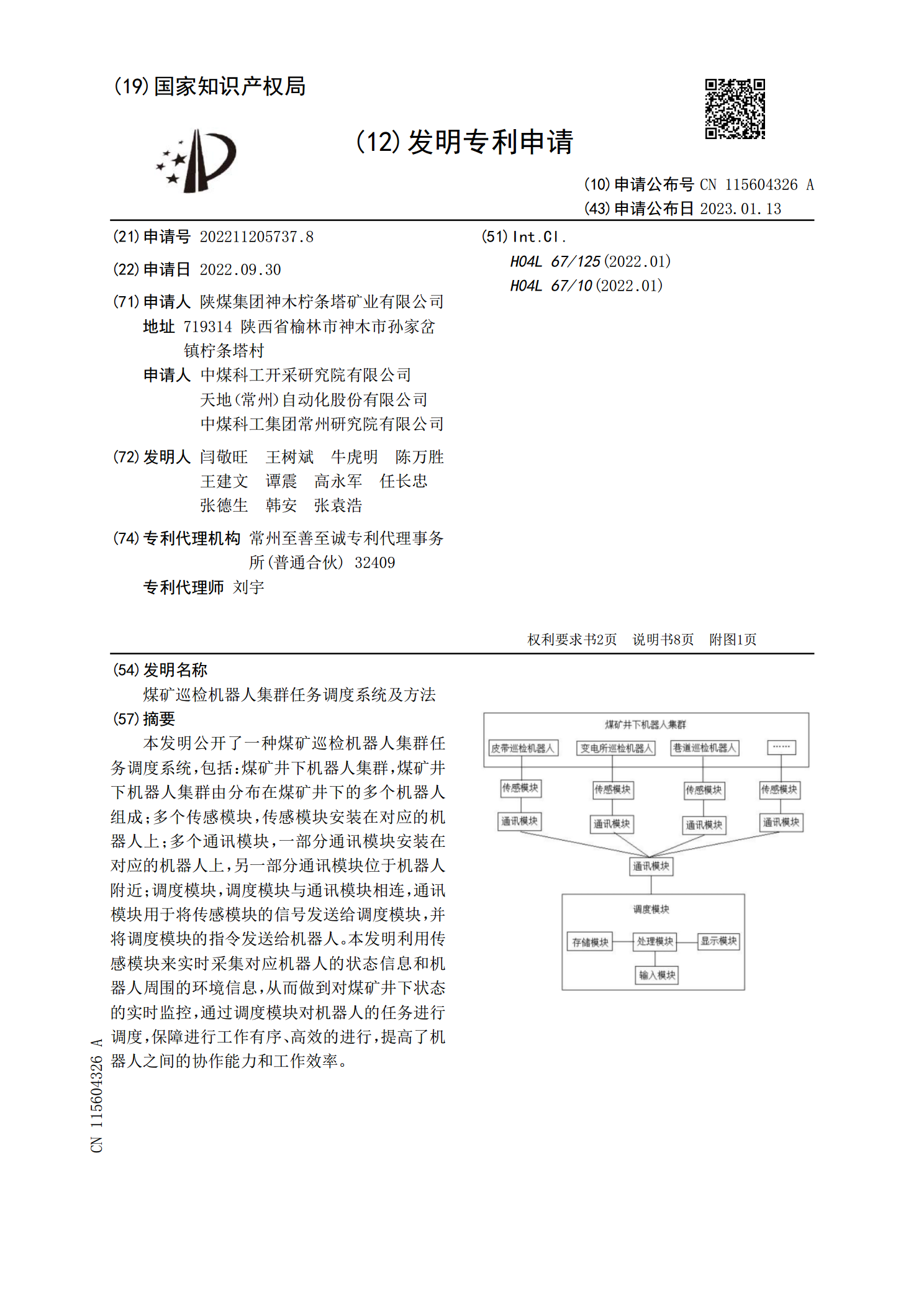
本发明公开了一种煤矿巡检机器人集群任务调度系统,包括:煤矿井下机器人集群,煤矿井下机器人集群由分布在煤矿井下的多个机器人组成;多个传感模块,传感模块安装在对应的机器人上;多个通讯模块,一部分通讯模块安装在对应的机器人上,另一部分通讯模块位于机器人附近;调度模块,调度模块与通讯模块相连,通讯模块用于将传感模块的信号发送给调度模块,并将调度模块的指令发送给机器人。本发明利用传感模块来实时采集对应机器人的状态信息和机器人周围的环境信息,从而做到对煤矿井下状态的实时监控,通过调度模块对机器人的任务进行调度,保障进

煤矿瓦斯巡检机器人方法及系统.pdf
本发明为煤矿瓦斯巡检机器人方法及系统,在巷道交叉入口布设有线控显示终端;线控显示终端设置有UWB定位基站,每条巷道的底部也设置有UWB定位基站;还包括设置有UWB定位标签的多个巡检机器人;根据UWB定位基站形成每条巷道内的一维定位网络;根据巡检请求中对应的处理事项生成巡航命令;发送巡航命令至相匹配的巡检机器人;响应巡航命令在对应的目标位置进行巡航,并进行处理事项的信号探测;当信号探测正常时,巡检机器人将探测数据进行存储,巡航结束后将探测数据传输至线控显示终端;当信号探测不正常时,巡检机器人将探测数据通过无

集群系统调度控制定时任务的方法及集群系统.pdf
本发明公开了集群系统调度控制定时任务的方法及集群系统。涉及计算机软件领域,其中,方法通过获取集群节点的节点编号,集群节点访问分布式缓存服务申请凭证,申请到凭证的集群节点作为调度节点获得调度控制权限,调度节点以轮询的方式从集群节点中计算得到执行节点的节点编号,执行节点获得执行权限执行定时任务。克服了现有技术中定时任务执行时负载不均衡的问题,在集群系统环境下,无需额外开发新系统,对系统侵入性小,在保证集群系统安全性和可靠性的前提下,通过凭证来判断调度控制权限,再通过调度节点选择执行节点执行定时任务,避免定时任

一种机器人集群巡检方法、系统、装置、设备及介质.pdf
本发明公开了一种机器人集群巡检方法、系统、装置、设备及介质。机器人集群巡检方法,包括:获取领航机器人的第一点云地图以及跟随者机器人的第二点云地图;根据第一点云地图以及第二点云地图,确定跟随者机器人的初始定位位置;根据跟随者机器人的初始定位位置,确定跟随者机器人的移动目标位置;根据跟随者机器人的移动目标位置,向跟随者机器人下发巡检指令。本发明实施例能够基于巡检机器人完成复杂巡检任务,并保证巡检机器人的高精度协作,还可以提升巡检效率,降低巡检失误。

煤矿巡检机器人运行状态监测系统及方法.pdf
本公开公开了一种煤矿巡检机器人运行状态监测系统及方法,涉及计算机技术领域。该煤矿巡检机器人运行状态监测系统,包括:数据采集单元、通信设备、线缆及监控平台;数据采集单元中包括多个传感器及通信模块,多个传感器分别设置在煤矿巡检机器人的多个监测端,用于采集所述煤矿巡检机器人的运行参数,通信模块,用于将传感器采集的运行参数发送给通信设备;通信设备通过线缆与监控平台连接,用于将数据采集单元采集的运行参数发送给监控平台,并将从监控平台获取的操控指令发送给数据采集单元。由此,可以对巡检机器人的运行状态进行实时的监测,及