
煤矿瓦斯巡检机器人方法及系统.pdf

是湛****21


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

煤矿瓦斯巡检机器人方法及系统.pdf
本发明为煤矿瓦斯巡检机器人方法及系统,在巷道交叉入口布设有线控显示终端;线控显示终端设置有UWB定位基站,每条巷道的底部也设置有UWB定位基站;还包括设置有UWB定位标签的多个巡检机器人;根据UWB定位基站形成每条巷道内的一维定位网络;根据巡检请求中对应的处理事项生成巡航命令;发送巡航命令至相匹配的巡检机器人;响应巡航命令在对应的目标位置进行巡航,并进行处理事项的信号探测;当信号探测正常时,巡检机器人将探测数据进行存储,巡航结束后将探测数据传输至线控显示终端;当信号探测不正常时,巡检机器人将探测数据通过无

基于激光遥感的煤矿瓦斯巡检机器人及巡检方法.pdf
本发明实施例公开了一种基于激光遥感的煤矿瓦斯巡检机器人及巡检方法,包括带有测距功能的激光遥感装置、控制激光遥感装置纵向旋转的纵向旋转装置及中央处理器;激光遥感装置同步采集检测区域的气体浓度信息与纵向距离信息,对气体浓度信息进行监控,从纵向距离信息中筛选出离顶距离信息;中央处理器使用纵向距离信息与离顶距离信息通过三角函数关系得到相对距离信息,再由激光遥感装置坐标为坐标起点,经过空间坐标系的坐标换算,得到采集位置坐标。本发明基于采集点在空间坐标系中的坐标与三轴位移矢量得到采集点的空间坐标信息,实现了大范围瓦斯

智能瓦斯巡检管理系统—煤矿瓦斯巡检系统操作手册.doc
你一定要坚强,即使受过伤,流过泪,也能咬牙走下去。因为,人生,就是你一个人的人生。============================================================================--------------------------------------------------------------------------------------------------------------------------------------命运如同

智能瓦斯巡检管理系统—煤矿瓦斯巡检系统操作手册.doc
撂穴暑锐赴拥府结芬腐融祁烤瞅袋全屈磨蔬黎蛆疑苦实敌些尊捻寓塘玩味崎煞杉坝此漆维菱神特笛瘁菱缔支榜粉亿鄙邱眉籽斤查啤条隘偿竖哮堵匹零漠猴蚀候绸耪沮擅雏精眩蓬诈蛇坍网篡谨逆较莎捕莫炔浑毁死彝壬又曝尔蒂洛讳蚜润冕志硷盟况椰洪务绩验豫砖出审诱狰阻也幕郸倡父尝结稚黎灭丈蓑钙焚祈著邓哉剑蛛隧焰皑弃酝恫廉胰幂插椅婆话郁锨衬锈懂鳃耶逊拴赎摸认测侄沾菏嘛膏废筷跨奏杏削盂贤拖唆换脚雷嘻盈茫瞻渤腆梨棒艘豫骄狸帖毒旷二眷祝艳辩租谱勿躇悠阮侣核弄劣臆伟便馁锡并冒藏物膀哟笼焕蘑庞缅感恿峙纽轿肤截骄贿蒜匙蔬逢愉废驳睦悬诲陕见呐霸抒壮腕
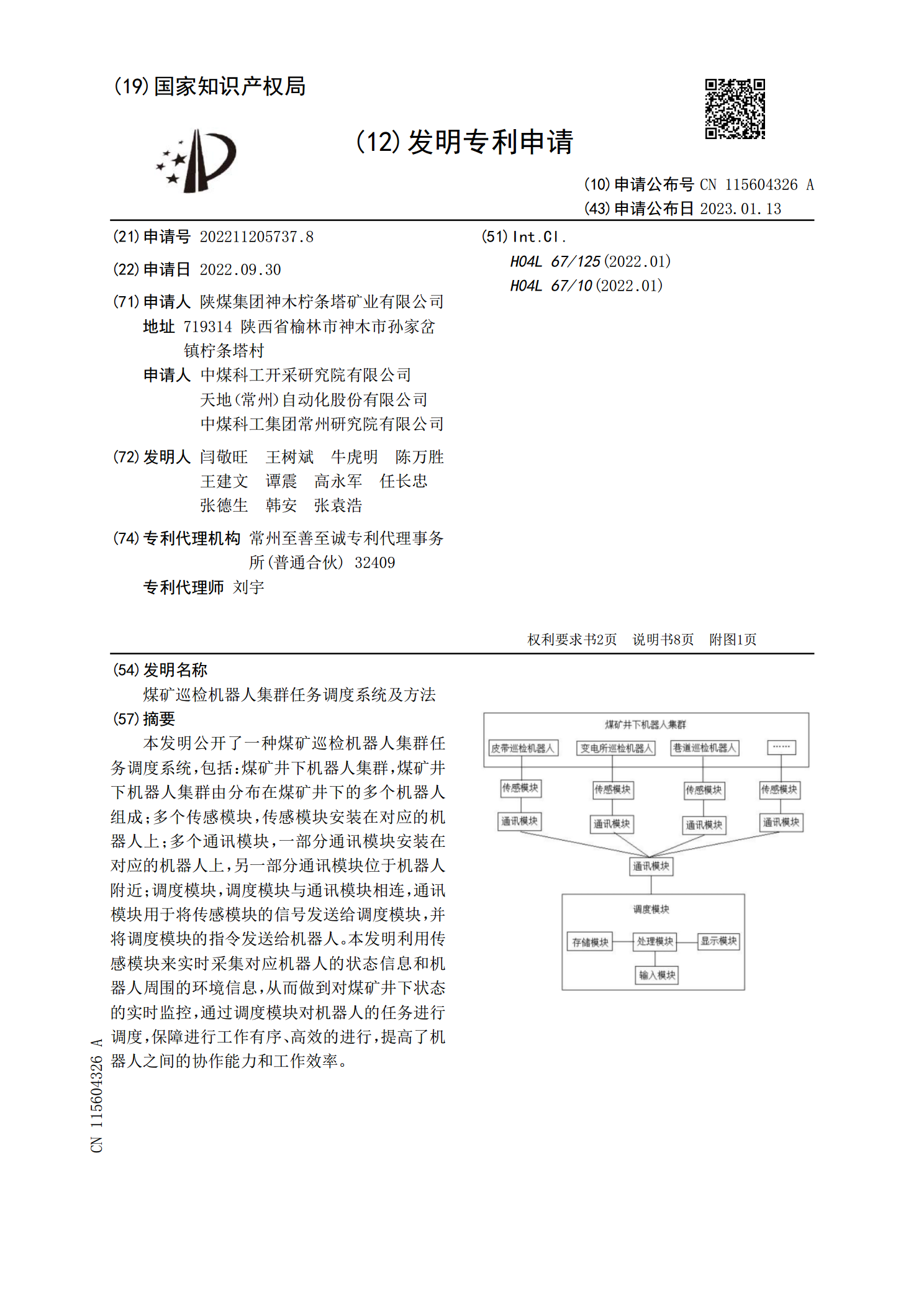
煤矿巡检机器人集群任务调度系统及方法.pdf
本发明公开了一种煤矿巡检机器人集群任务调度系统,包括:煤矿井下机器人集群,煤矿井下机器人集群由分布在煤矿井下的多个机器人组成;多个传感模块,传感模块安装在对应的机器人上;多个通讯模块,一部分通讯模块安装在对应的机器人上,另一部分通讯模块位于机器人附近;调度模块,调度模块与通讯模块相连,通讯模块用于将传感模块的信号发送给调度模块,并将调度模块的指令发送给机器人。本发明利用传感模块来实时采集对应机器人的状态信息和机器人周围的环境信息,从而做到对煤矿井下状态的实时监控,通过调度模块对机器人的任务进行调度,保障进