
一种机器人集群巡检方法、系统、装置、设备及介质.pdf

雨巷****莺莺


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人集群巡检方法、系统、装置、设备及介质.pdf
本发明公开了一种机器人集群巡检方法、系统、装置、设备及介质。机器人集群巡检方法,包括:获取领航机器人的第一点云地图以及跟随者机器人的第二点云地图;根据第一点云地图以及第二点云地图,确定跟随者机器人的初始定位位置;根据跟随者机器人的初始定位位置,确定跟随者机器人的移动目标位置;根据跟随者机器人的移动目标位置,向跟随者机器人下发巡检指令。本发明实施例能够基于巡检机器人完成复杂巡检任务,并保证巡检机器人的高精度协作,还可以提升巡检效率,降低巡检失误。
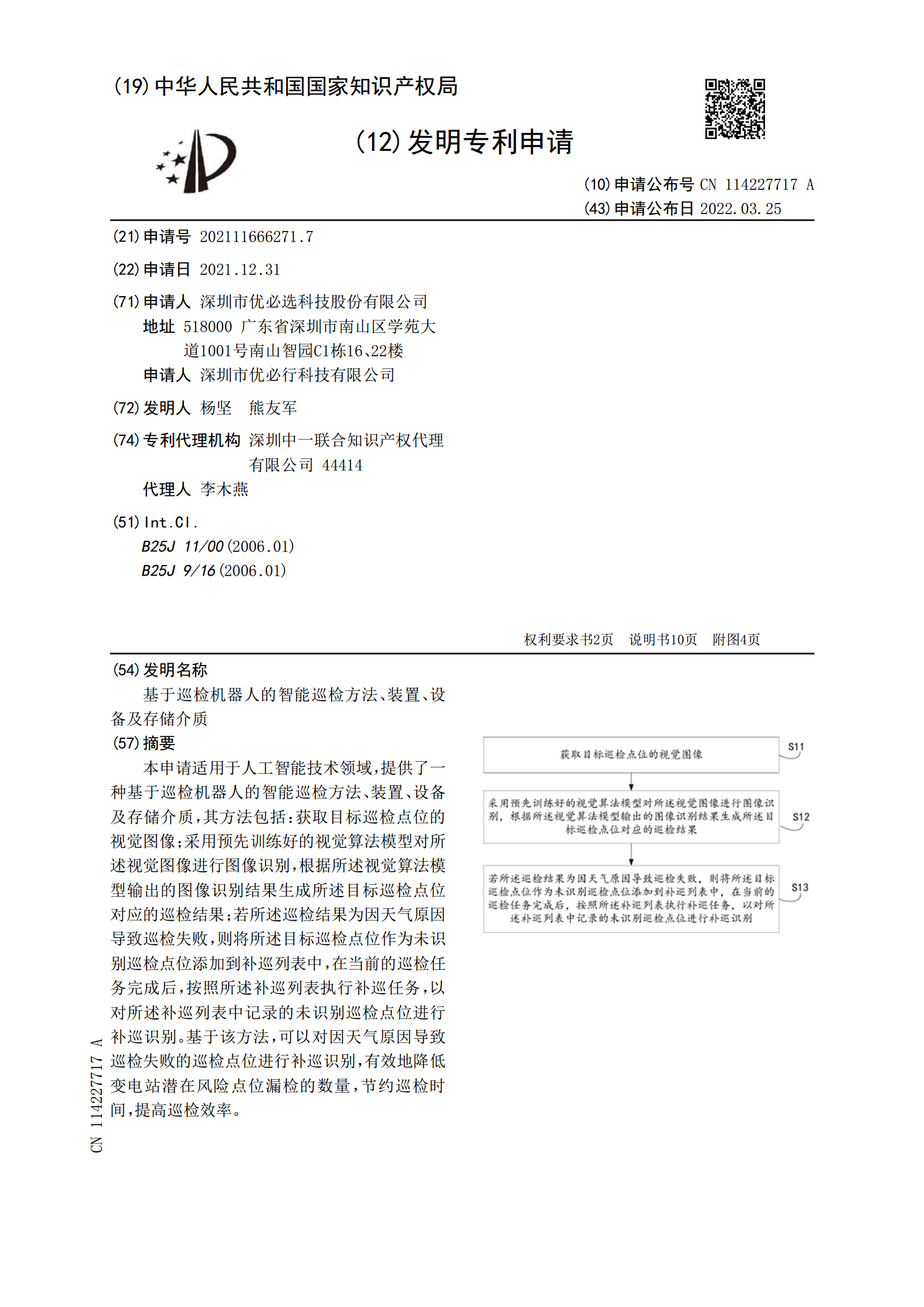
基于巡检机器人的智能巡检方法、装置、设备及存储介质.pdf
本申请适用于人工智能技术领域,提供了一种基于巡检机器人的智能巡检方法、装置、设备及存储介质,其方法包括:获取目标巡检点位的视觉图像;采用预先训练好的视觉算法模型对所述视觉图像进行图像识别,根据所述视觉算法模型输出的图像识别结果生成所述目标巡检点位对应的巡检结果;若所述巡检结果为因天气原因导致巡检失败,则将所述目标巡检点位作为未识别巡检点位添加到补巡列表中,在当前的巡检任务完成后,按照所述补巡列表执行补巡任务,以对所述补巡列表中记录的未识别巡检点位进行补巡识别。基于该方法,可以对因天气原因导致巡检失败的巡检
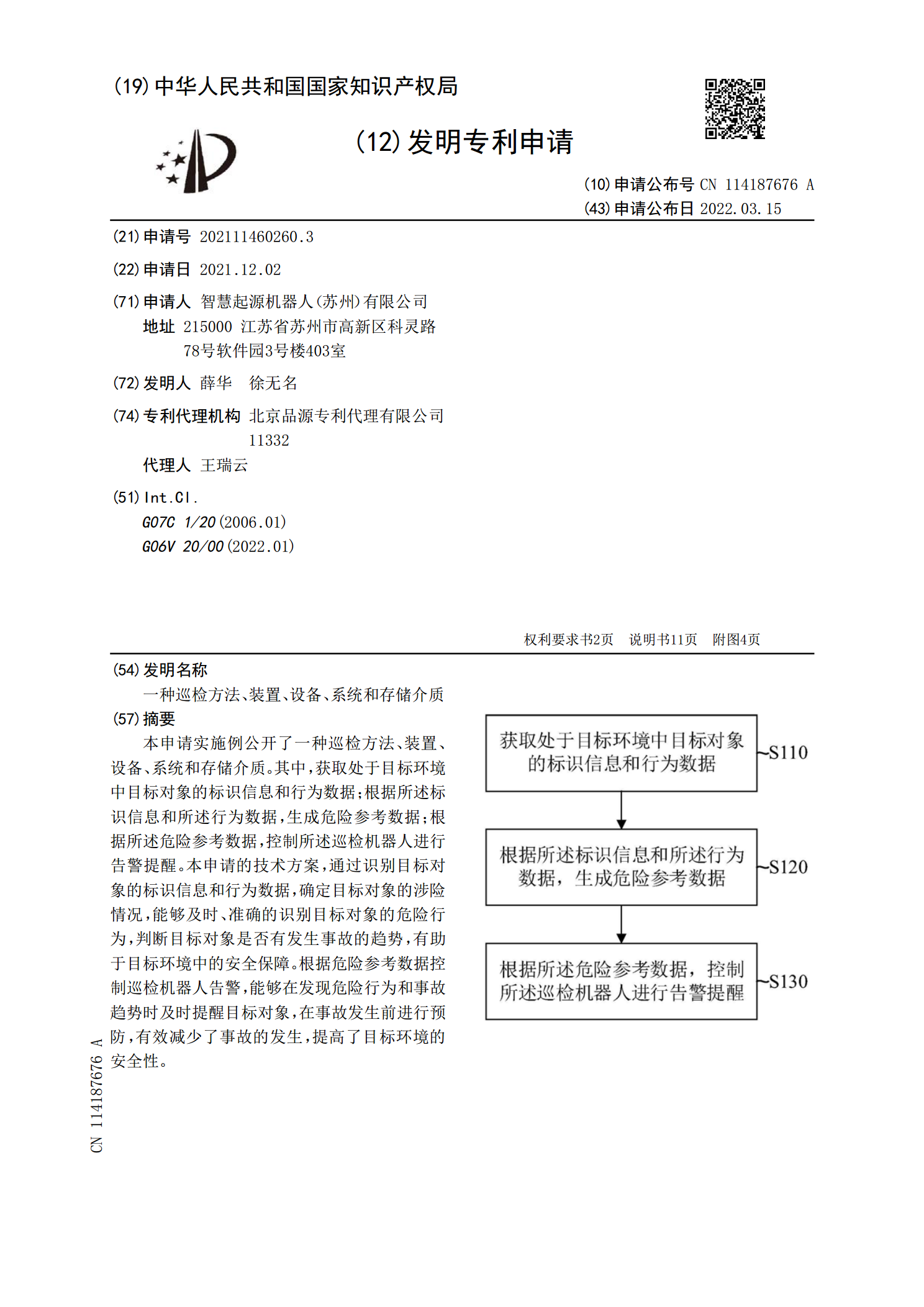
一种巡检方法、装置、设备、系统和存储介质.pdf
本申请实施例公开了一种巡检方法、装置、设备、系统和存储介质。其中,获取处于目标环境中目标对象的标识信息和行为数据;根据所述标识信息和所述行为数据,生成危险参考数据;根据所述危险参考数据,控制所述巡检机器人进行告警提醒。本申请的技术方案,通过识别目标对象的标识信息和行为数据,确定目标对象的涉险情况,能够及时、准确的识别目标对象的危险行为,判断目标对象是否有发生事故的趋势,有助于目标环境中的安全保障。根据危险参考数据控制巡检机器人告警,能够在发现危险行为和事故趋势时及时提醒目标对象,在事故发生前进行预防,有效

一种集群NAS系统监控方法、装置、设备及介质.pdf
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号CN109639793A(43)申请公布日2019.04.16(21)申请号CN201811506283.1(22)申请日2018.12.10(71)申请人广东浪潮大数据研究有限公司地址510620广东省广州市天河区黄埔大道西平云路163号A塔9层自编01单元(72)发明人吴昊(74)专利代理机构北京集佳知识产权代理有限公司代理人罗满(51)Int.CI权利要求说明书说明书幅图(54)发明名称一种集群NAS系统监控方法、装置、设备及

一种防疫检查的机器人巡检系统、方法、设备及存储介质.pdf
本发明公开了一种防疫检查的机器人巡检方法、系统、设备及存储介质,所述系统包括:机器人主体、红外热成像仪、可见光成像仪、红外镜头、高清摄像头,所述机器人主体分别与所述高清摄像头、所述红外热成像仪、所述可见光成像仪、所述红外镜头通讯连接;所述机器人主体包括监控模块、控制模块、通信模块,所述控制模块通过所述通信模块与所述监控模块通讯连接,所述高清摄像头的输出端、所述红外热成像仪输出端、所述可见光成像仪输出端、所述红外镜头的输出端分别与所述控制模块的输入端通讯连接。本发明使得防疫目标检测流动起来,从整体上实现了巡