
煤矿巡检机器人运行状态监测系统及方法.pdf

建英****66


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

煤矿巡检机器人运行状态监测系统及方法.pdf
本公开公开了一种煤矿巡检机器人运行状态监测系统及方法,涉及计算机技术领域。该煤矿巡检机器人运行状态监测系统,包括:数据采集单元、通信设备、线缆及监控平台;数据采集单元中包括多个传感器及通信模块,多个传感器分别设置在煤矿巡检机器人的多个监测端,用于采集所述煤矿巡检机器人的运行参数,通信模块,用于将传感器采集的运行参数发送给通信设备;通信设备通过线缆与监控平台连接,用于将数据采集单元采集的运行参数发送给监控平台,并将从监控平台获取的操控指令发送给数据采集单元。由此,可以对巡检机器人的运行状态进行实时的监测,及

煤矿瓦斯巡检机器人方法及系统.pdf
本发明为煤矿瓦斯巡检机器人方法及系统,在巷道交叉入口布设有线控显示终端;线控显示终端设置有UWB定位基站,每条巷道的底部也设置有UWB定位基站;还包括设置有UWB定位标签的多个巡检机器人;根据UWB定位基站形成每条巷道内的一维定位网络;根据巡检请求中对应的处理事项生成巡航命令;发送巡航命令至相匹配的巡检机器人;响应巡航命令在对应的目标位置进行巡航,并进行处理事项的信号探测;当信号探测正常时,巡检机器人将探测数据进行存储,巡航结束后将探测数据传输至线控显示终端;当信号探测不正常时,巡检机器人将探测数据通过无
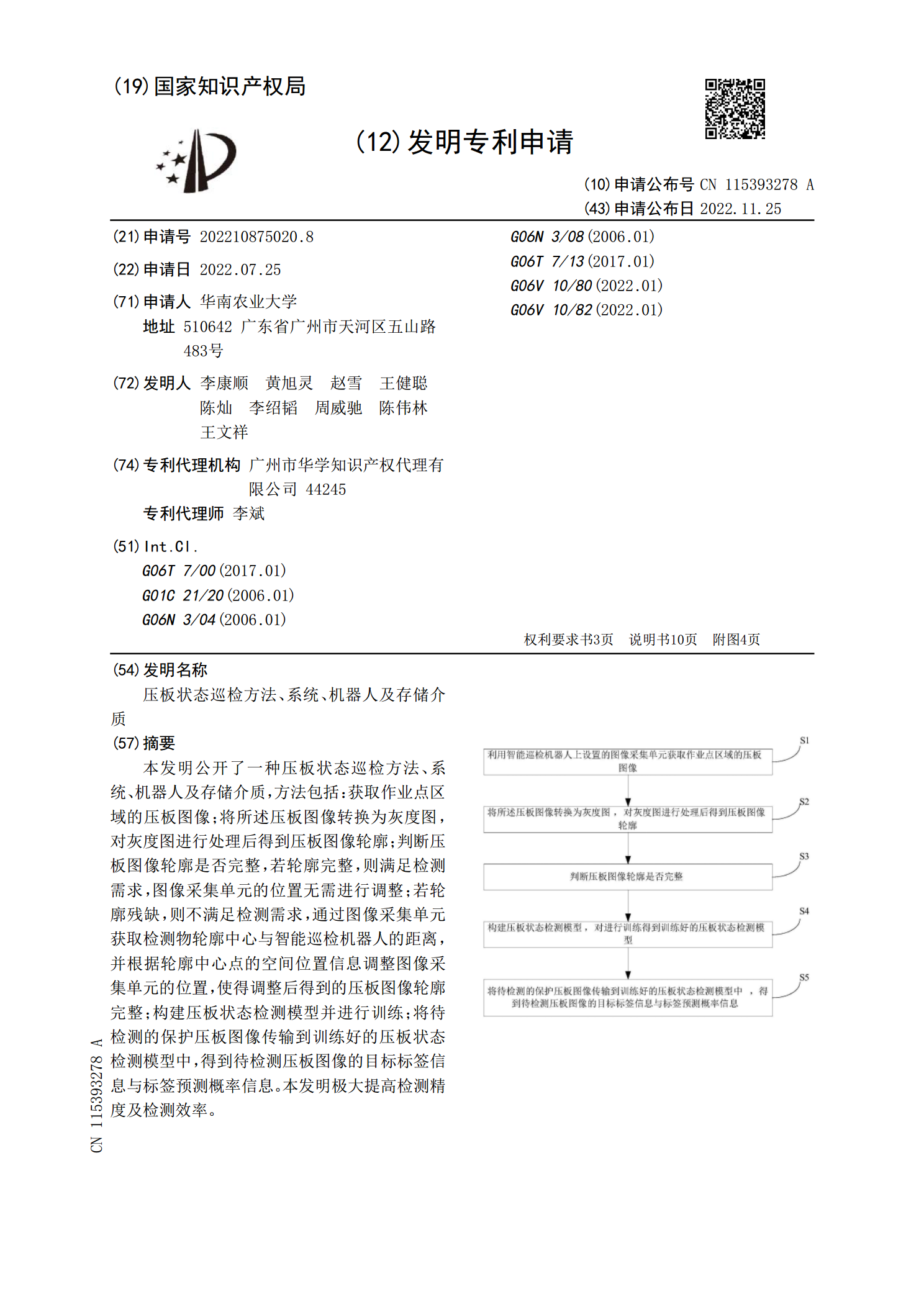
压板状态巡检方法、系统、机器人及存储介质.pdf
本发明公开了一种压板状态巡检方法、系统、机器人及存储介质,方法包括:获取作业点区域的压板图像;将所述压板图像转换为灰度图,对灰度图进行处理后得到压板图像轮廓;判断压板图像轮廓是否完整,若轮廓完整,则满足检测需求,图像采集单元的位置无需进行调整;若轮廓残缺,则不满足检测需求,通过图像采集单元获取检测物轮廓中心与智能巡检机器人的距离,并根据轮廓中心点的空间位置信息调整图像采集单元的位置,使得调整后得到的压板图像轮廓完整;构建压板状态检测模型并进行训练;将待检测的保护压板图像传输到训练好的压板状态检测模型中,得
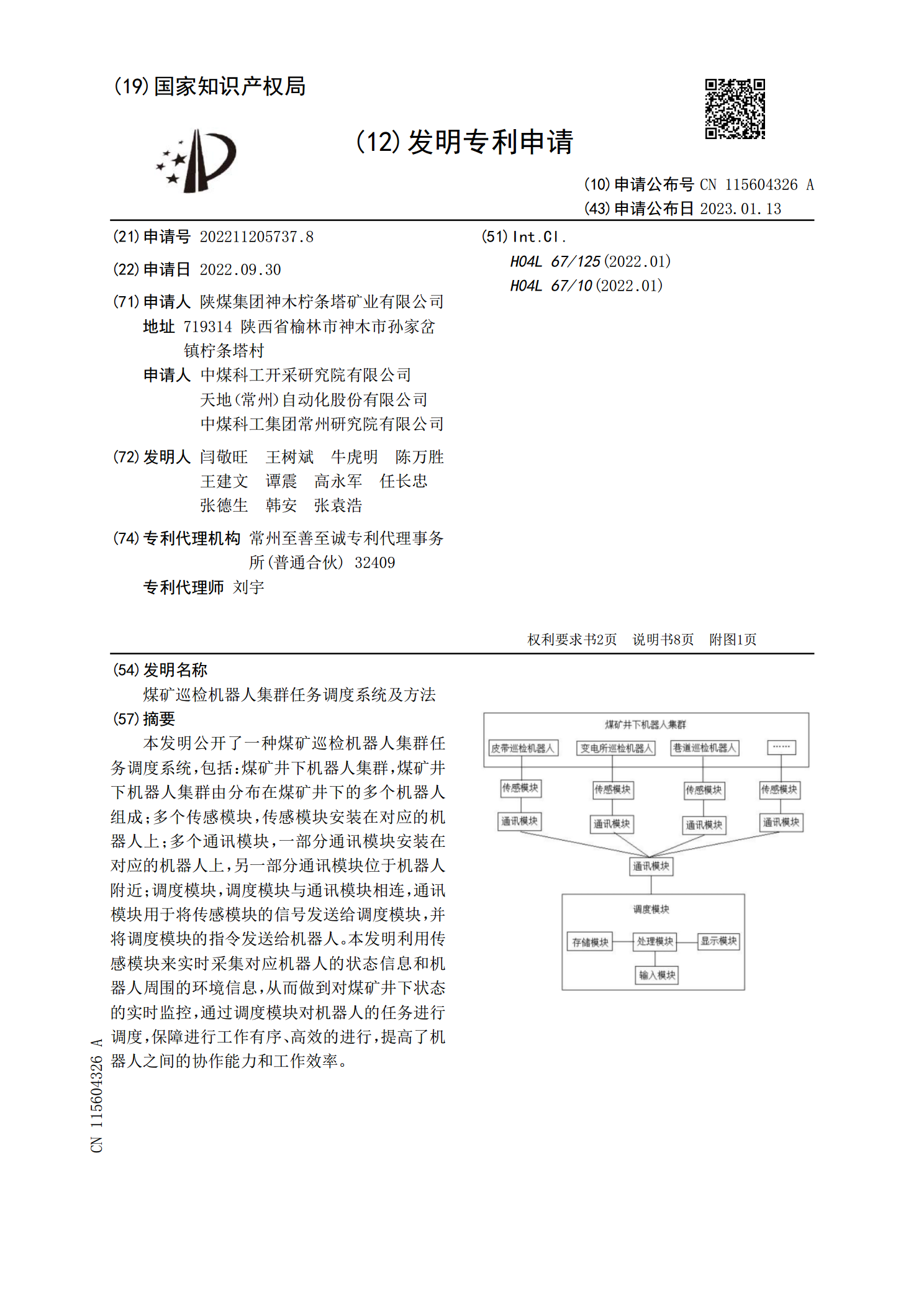
煤矿巡检机器人集群任务调度系统及方法.pdf
本发明公开了一种煤矿巡检机器人集群任务调度系统,包括:煤矿井下机器人集群,煤矿井下机器人集群由分布在煤矿井下的多个机器人组成;多个传感模块,传感模块安装在对应的机器人上;多个通讯模块,一部分通讯模块安装在对应的机器人上,另一部分通讯模块位于机器人附近;调度模块,调度模块与通讯模块相连,通讯模块用于将传感模块的信号发送给调度模块,并将调度模块的指令发送给机器人。本发明利用传感模块来实时采集对应机器人的状态信息和机器人周围的环境信息,从而做到对煤矿井下状态的实时监控,通过调度模块对机器人的任务进行调度,保障进
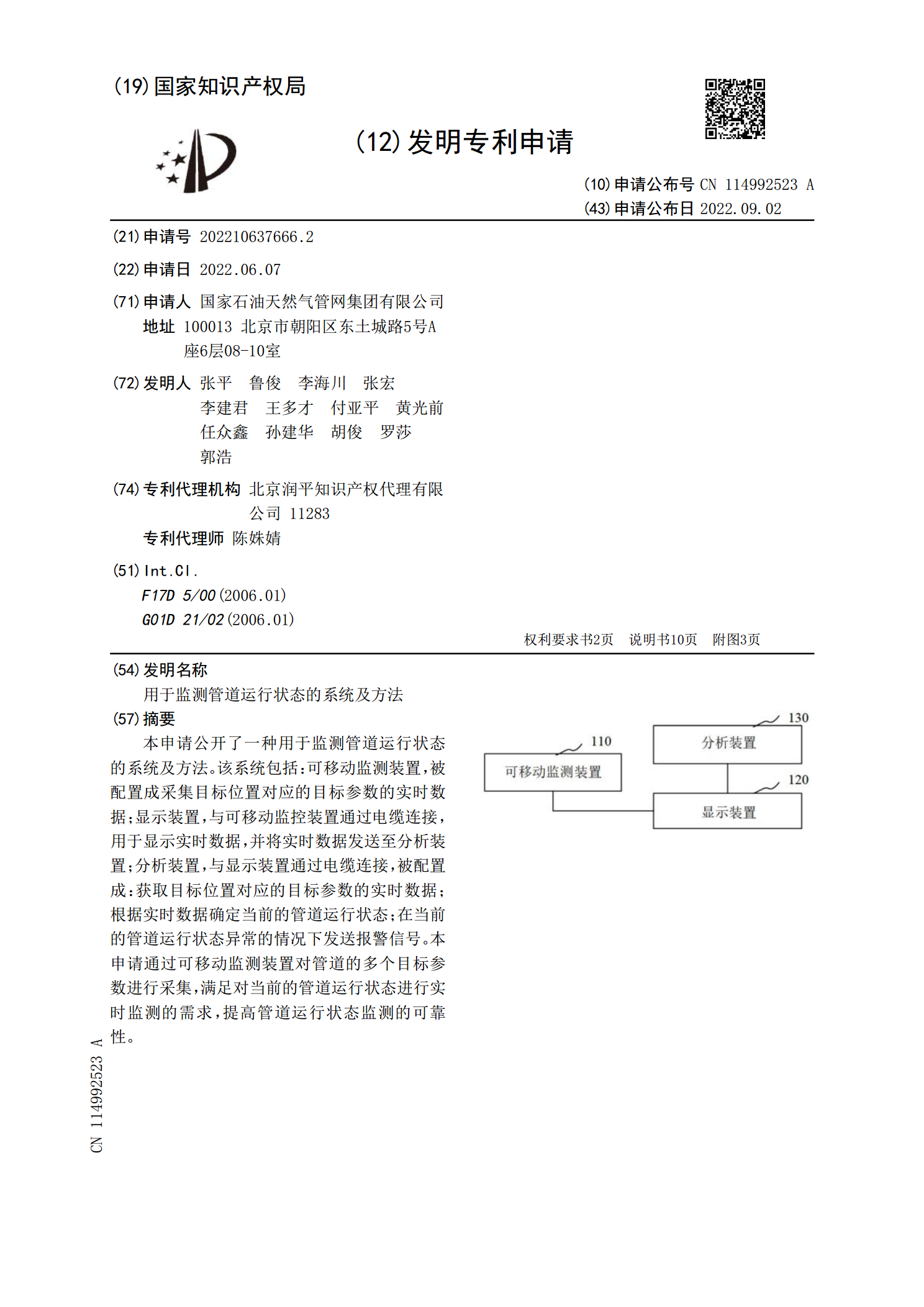
用于监测管道运行状态的系统及方法.pdf
本申请公开了一种用于监测管道运行状态的系统及方法。该系统包括:可移动监测装置,被配置成采集目标位置对应的目标参数的实时数据;显示装置,与可移动监控装置通过电缆连接,用于显示实时数据,并将实时数据发送至分析装置;分析装置,与显示装置通过电缆连接,被配置成:获取目标位置对应的目标参数的实时数据;根据实时数据确定当前的管道运行状态;在当前的管道运行状态异常的情况下发送报警信号。本申请通过可移动监测装置对管道的多个目标参数进行采集,满足对当前的管道运行状态进行实时监测的需求,提高管道运行状态监测的可靠性。