
一种具有柔性连杆的蛇形机器人及仿生控制方法.pdf

一吃****永贺


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种具有柔性连杆的蛇形机器人及仿生控制方法.pdf
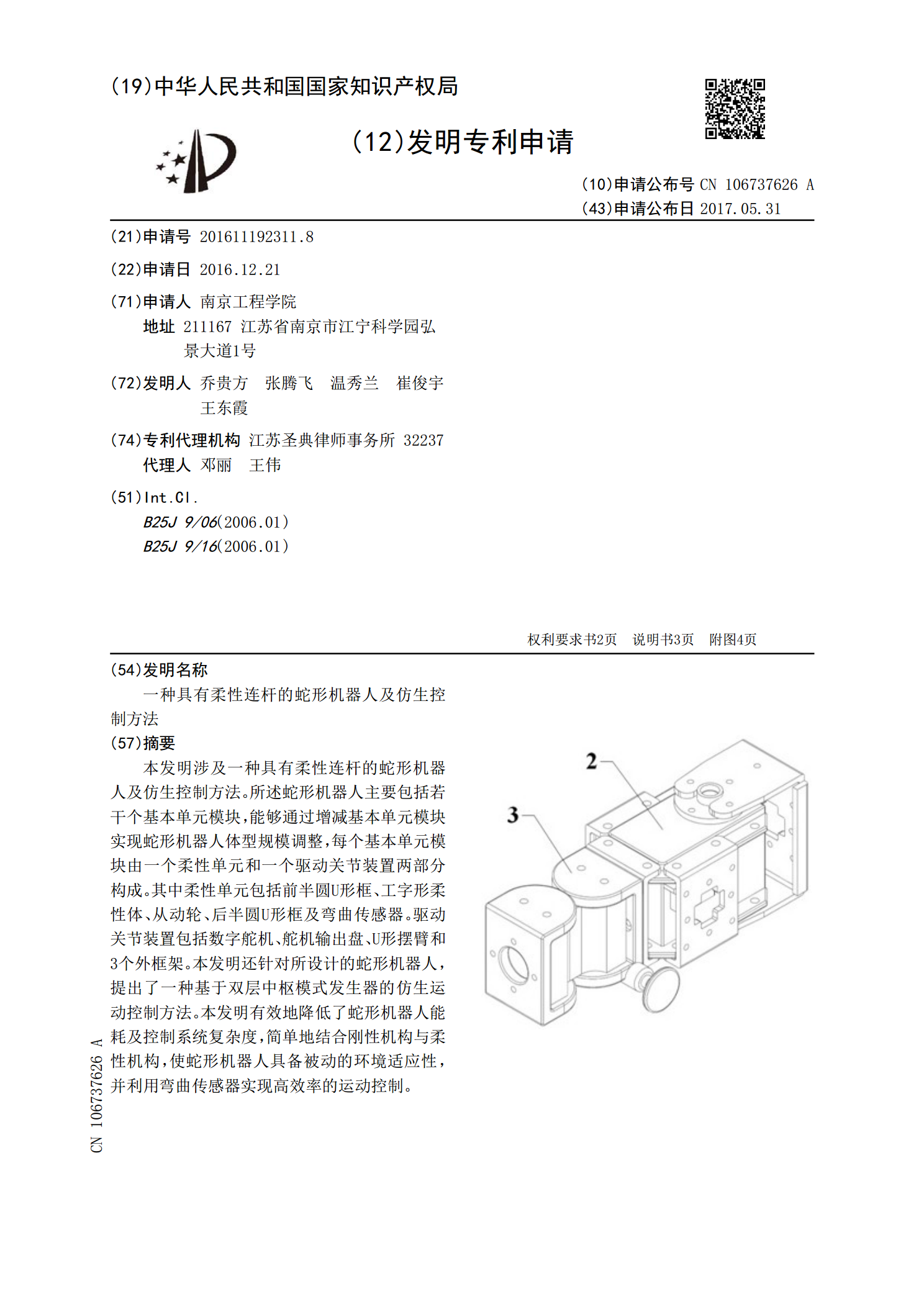
本发明涉及一种具有柔性连杆的蛇形机器人及仿生控制方法。所述蛇形机器人主要包括若干个基本单元模块,能够通过增减基本单元模块实现蛇形机器人体型规模调整,每个基本单元模块由一个柔性单元和一个驱动关节装置两部分构成。其中柔性单元包括前半圆U形框、工字形柔性体、从动轮、后半圆U形框及弯曲传感器。驱动关节装置包括数字舵机、舵机输出盘、U形摆臂和3个外框架。本发明还针对所设计的蛇形机器人,提出了一种基于双层中枢模式发生器的仿生运动控制方法。本发明有效地降低了蛇形机器人能耗及控制系统复杂度,简单地结合刚性机构与柔性机构,

仿生蛇形机器人的导航与控制.docx
仿生蛇形机器人的导航与控制导言仿生机器人是一种模仿自然生物形态和行为的机器人系统,它通过学习和模拟生物的运动方式和行为模式,能够更灵活、高效地适应不同环境和任务。蛇形机器人作为一种仿生机器人,在灵活性、自适应性和机动性等方面具有独特优势,因此被广泛用于地下和水下探测等复杂环境中。本论文将重点讨论蛇形机器人的导航与控制方法。一、蛇形机器人的形态结构与行为特点蛇形机器人通过模拟蛇类的形态和运动方式来完成任务。一般来说,蛇形机器人由多个连续的模块组成,每个模块包含一个或多个自由度的关节,通过控制这些关节的运动来

具有大弯曲角的机器人蛇形柔性臂.doc
具有大弯曲角的机器人蛇形柔性臂摘要:蛇形柔性臂由吸盘、主传动机构、转角机构、运动转换机构、控制系统以及电源几部分组成,其中主传动机构是其关键技术。它具有7个自由度,6个关节转动自由度,1个柔性臂整体转动自由度,柔性化主要通过其主传动机构来...蛇形柔性臂由吸盘、主传动机构、转角机构、运动转换机构、控制系统以及电源几部分组成,其中主传动机构是其关键技术。它具有7个自由度,6个关节转动自由度,1个柔性臂整体转动自由度,柔性化主要通过其主传动机构来实现。主传动机构是在等角度传动机构的基础上对结构作了某些创新后而
一种生物仿生蛇形机器人.pdf
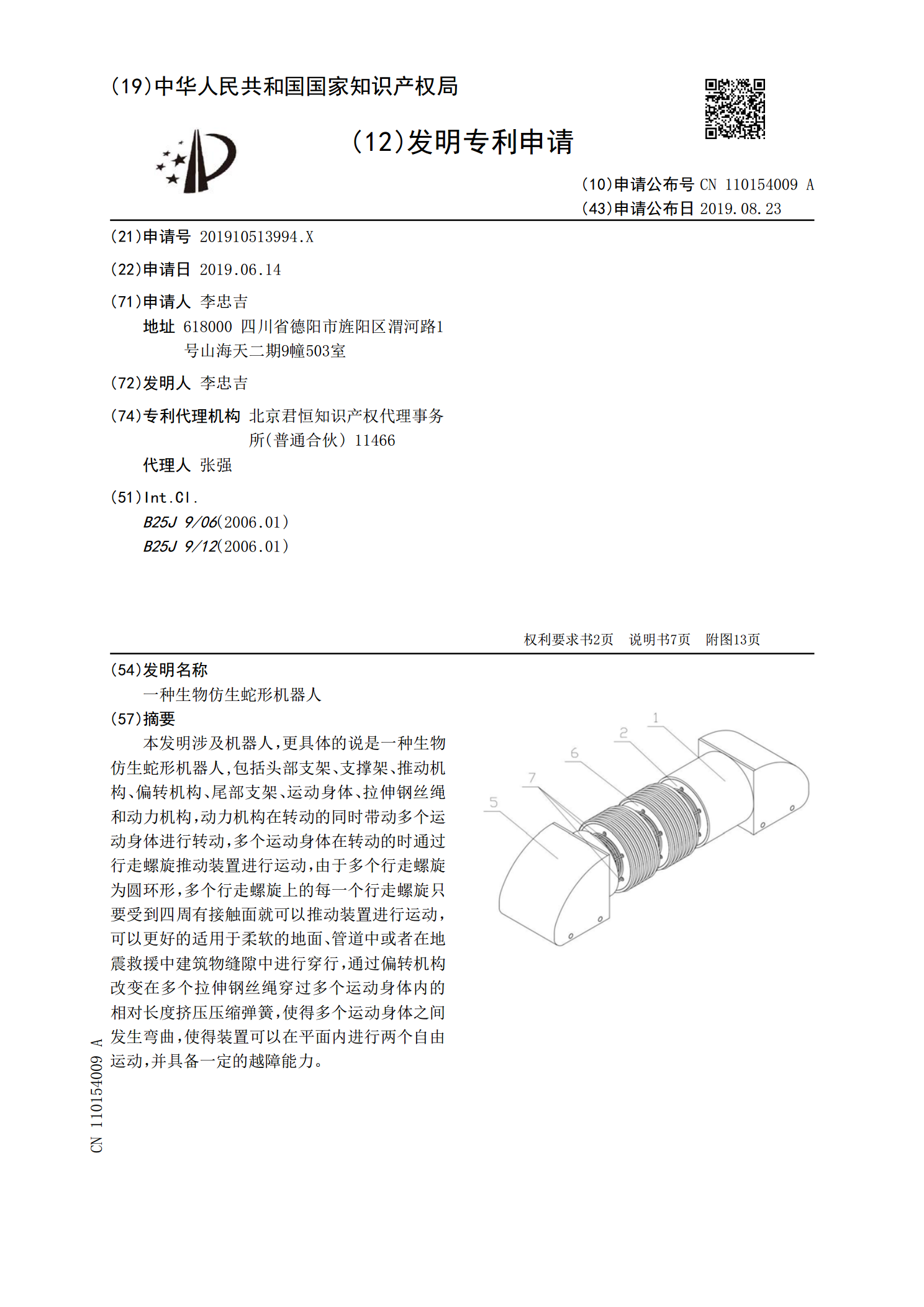
本发明涉及机器人,更具体的说是一种生物仿生蛇形机器人,包括头部支架、支撑架、推动机构、偏转机构、尾部支架、运动身体、拉伸钢丝绳和动力机构,动力机构在转动的同时带动多个运动身体进行转动,多个运动身体在转动的时通过行走螺旋推动装置进行运动,由于多个行走螺旋为圆环形,多个行走螺旋上的每一个行走螺旋只要受到四周有接触面就可以推动装置进行运动,可以更好的适用于柔软的地面、管道中或者在地震救援中建筑物缝隙中进行穿行,通过偏转机构改变在多个拉伸钢丝绳穿过多个运动身体内的相对长度挤压压缩弹簧,使得多个运动身体之间发生弯曲

蛇形仿生机器人运动控制研究.docx
蛇形仿生机器人运动控制研究摘要本文针对蛇形仿生机器人运动控制问题进行了研究,提出了一种基于模糊控制的运动控制方法。首先,介绍了蛇形仿生机器人的结构和运动特性,分析了其优势和局限性。接着,针对传统的运动控制方法在蛇形机器人中效果不佳的问题,提出了一种基于模糊控制的方法,并给出了具体实现方式和控制流程。最后,通过实验验证了该方法的有效性和优越性。关键词:蛇形仿生机器人;模糊控制;运动控制引言蛇形仿生机器人是近年来机器人技术领域的一个热点研究方向。它具有较好的机动性和适应性,可以在复杂环境下进行灵活、高效的运动