
用于清洁硫化模具的方法及设备.pdf

雨巷****彦峰

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于清洁硫化模具的方法及设备.pdf
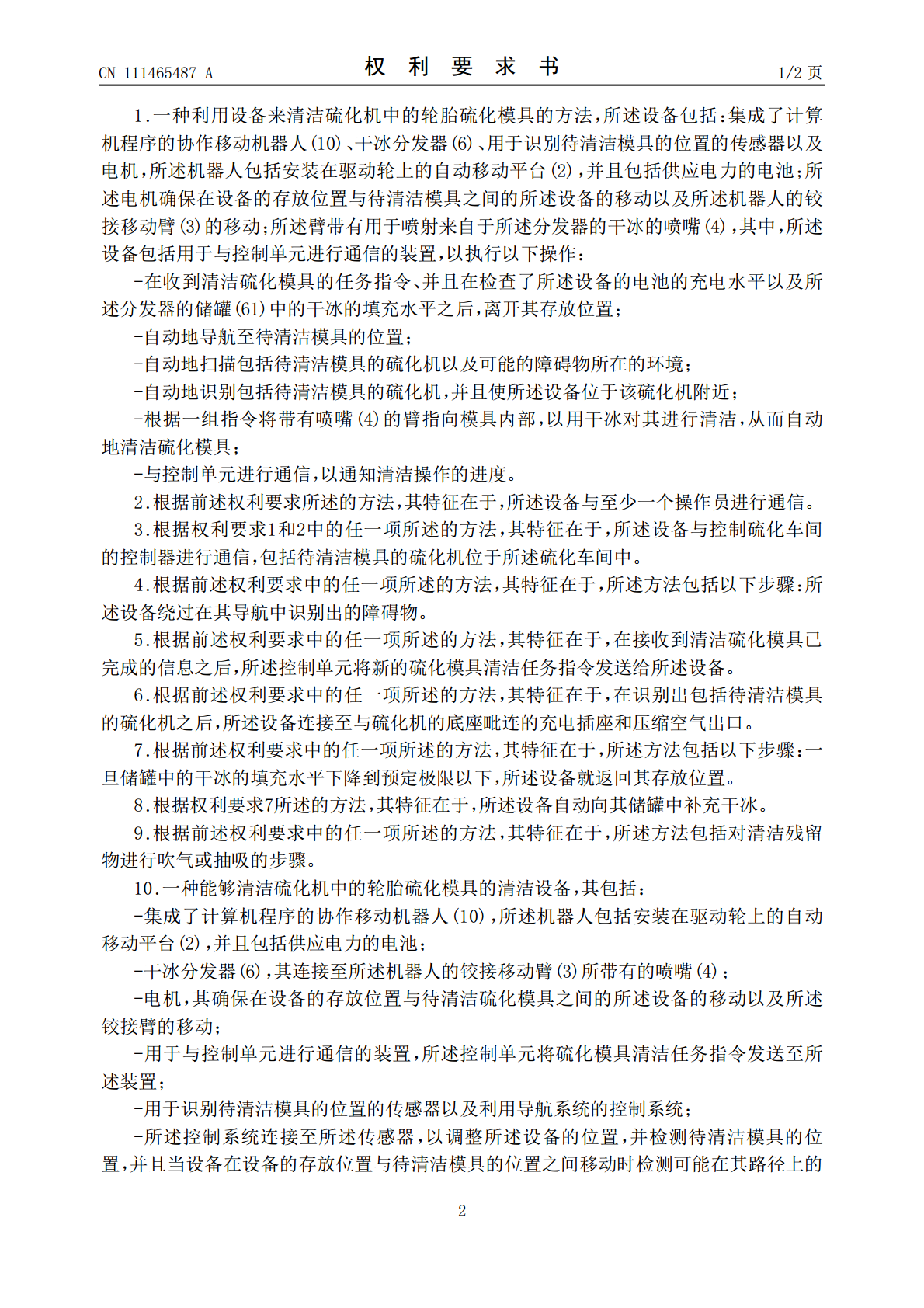
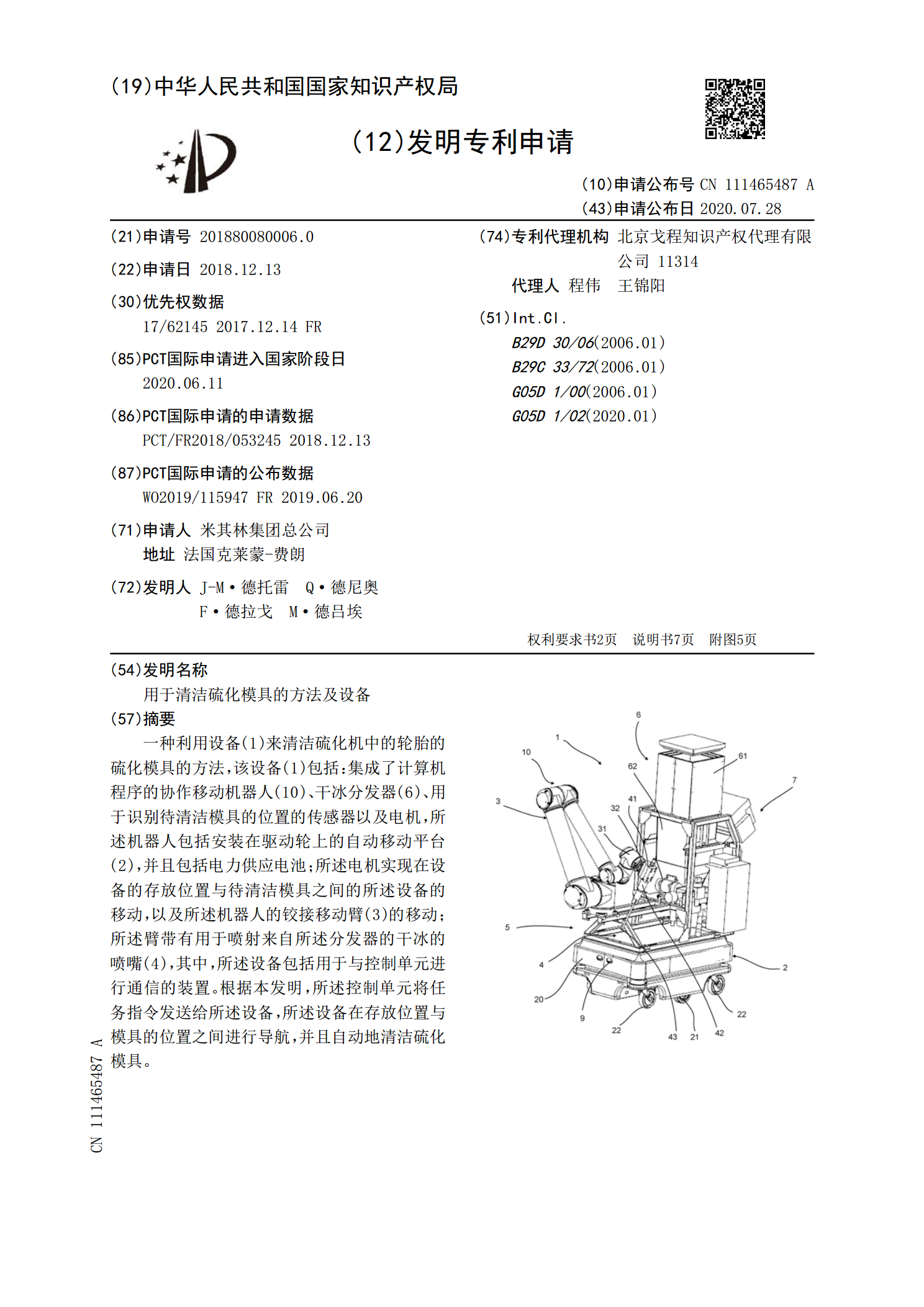
一种利用设备(1)来清洁硫化机中的轮胎的硫化模具的方法,该设备(1)包括:集成了计算机程序的协作移动机器人(10)、干冰分发器(6)、用于识别待清洁模具的位置的传感器以及电机,所述机器人包括安装在驱动轮上的自动移动平台(2),并且包括电力供应电池;所述电机实现在设备的存放位置与待清洁模具之间的所述设备的移动,以及所述机器人的铰接移动臂(3)的移动;所述臂带有用于喷射来自所述分发器的干冰的喷嘴(4),其中,所述设备包括用于与控制单元进行通信的装置。根据本发明,所述控制单元将任务指令发送给所述设备,所述设备在
轮胎硫化模具、用于铸造轮胎硫化模具的铸模、以及轮胎硫化模具的制造方法.pdf
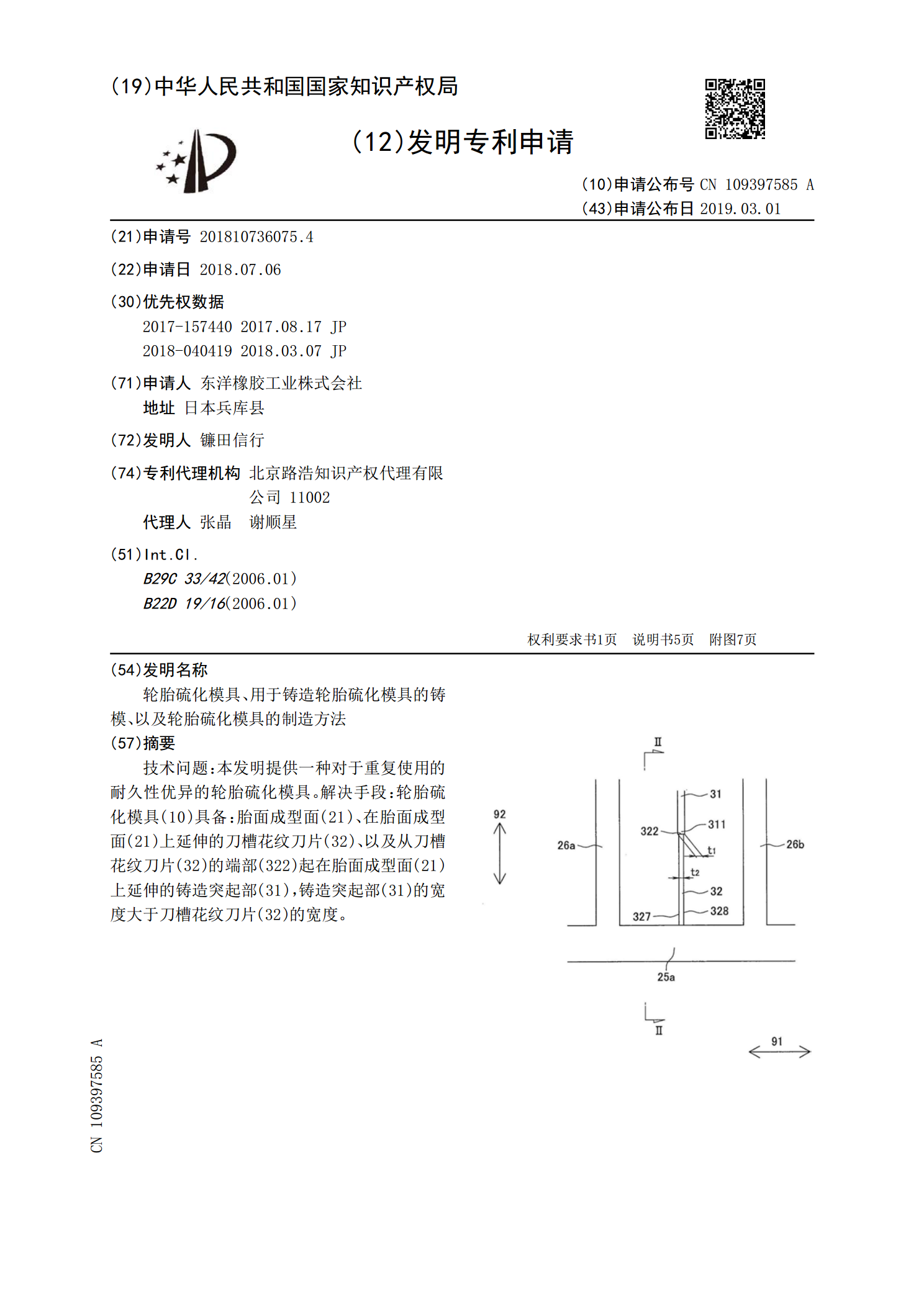
技术问题:本发明提供一种对于重复使用的耐久性优异的轮胎硫化模具。解决手段:轮胎硫化模具(10)具备:胎面成型面(21)、在胎面成型面(21)上延伸的刀槽花纹刀片(32)、以及从刀槽花纹刀片(32)的端部(322)起在胎面成型面(21)上延伸的铸造突起部(31),铸造突起部(31)的宽度大于刀槽花纹刀片(32)的宽度。
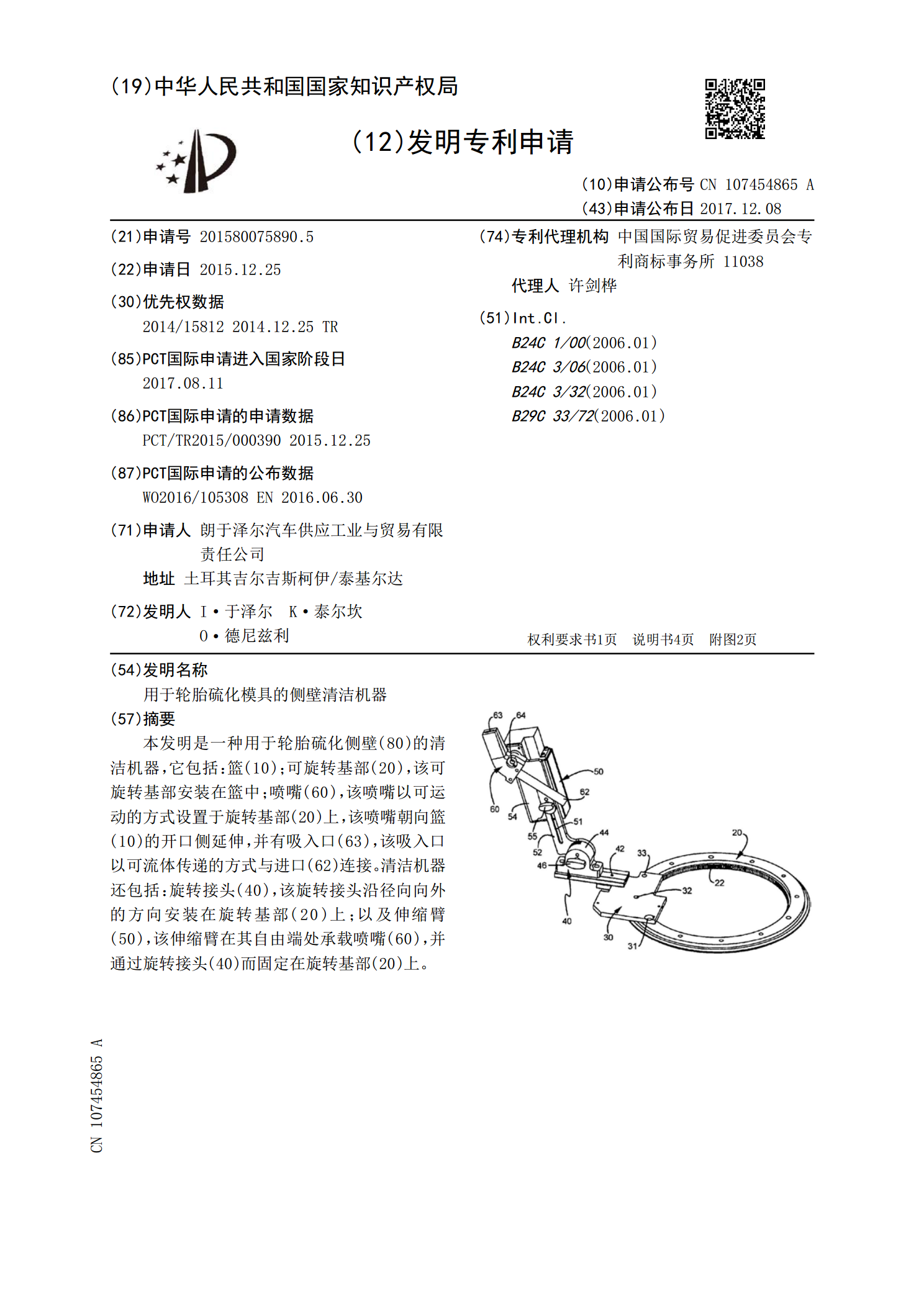
用于轮胎硫化模具的侧壁清洁机器.pdf
本发明是一种用于轮胎硫化侧壁(80)的清洁机器,它包括:篮(10);可旋转基部(20),该可旋转基部安装在篮中;喷嘴(60),该喷嘴以可运动的方式设置于旋转基部(20)上,该喷嘴朝向篮(10)的开口侧延伸,并有吸入口(63),该吸入口以可流体传递的方式与进口(62)连接。清洁机器还包括:旋转接头(40),该旋转接头沿径向向外的方向安装在旋转基部(20)上;以及伸缩臂(50),该伸缩臂在其自由端处承载喷嘴(60),并通过旋转接头(40)而固定在旋转基部(20)上。
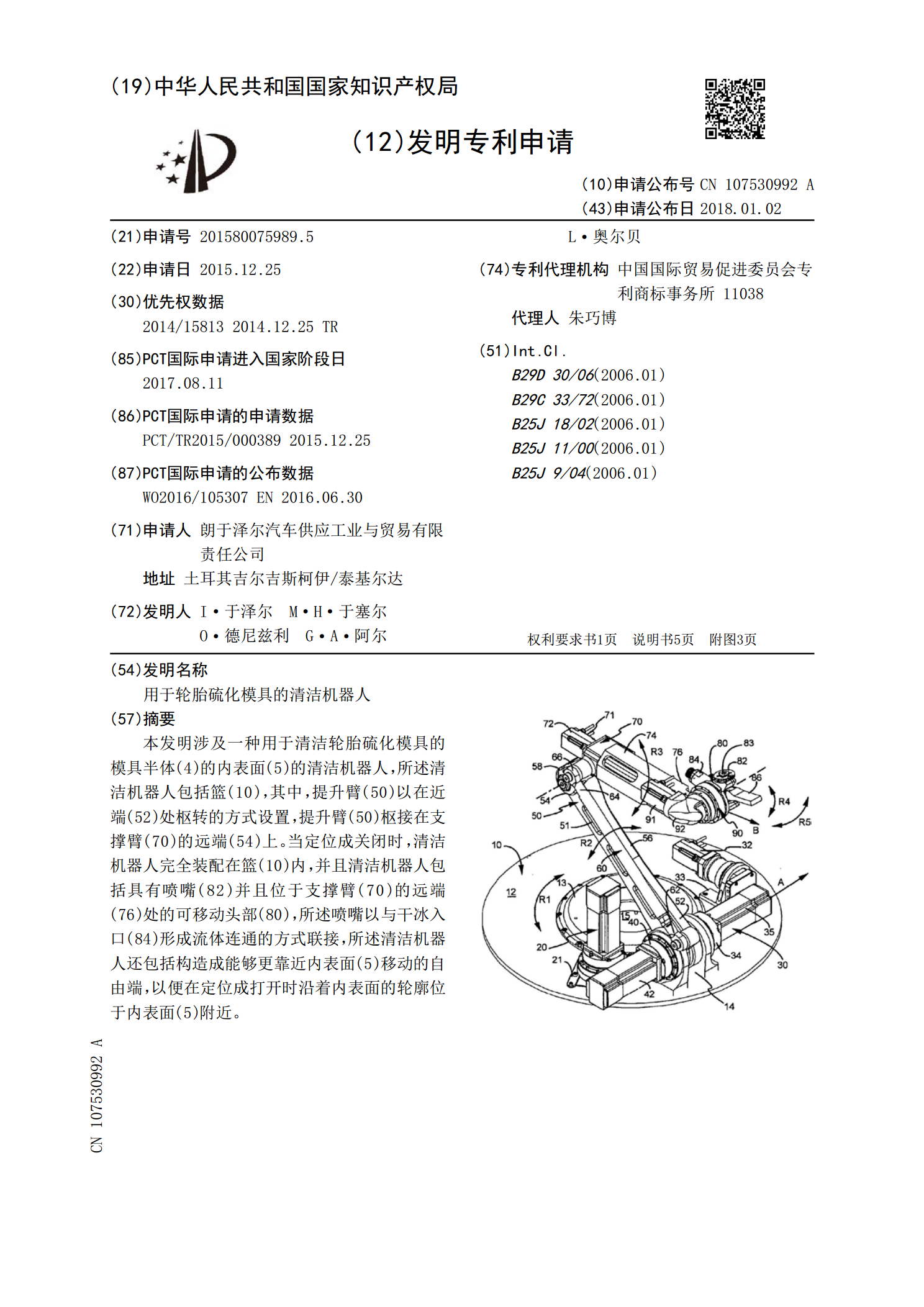
用于轮胎硫化模具的清洁机器人.pdf
本发明涉及一种用于清洁轮胎硫化模具的模具半体(4)的内表面(5)的清洁机器人,所述清洁机器人包括篮(10),其中,提升臂(50)以在近端(52)处枢转的方式设置,提升臂(50)枢接在支撑臂(70)的远端(54)上。当定位成关闭时,清洁机器人完全装配在篮(10)内,并且清洁机器人包括具有喷嘴(82)并且位于支撑臂(70)的远端(76)处的可移动头部(80),所述喷嘴以与干冰入口(84)形成流体连通的方式联接,所述清洁机器人还包括构造成能够更靠近内表面(5)移动的自由端,以便在定位成打开时沿着内表面的轮廓位于
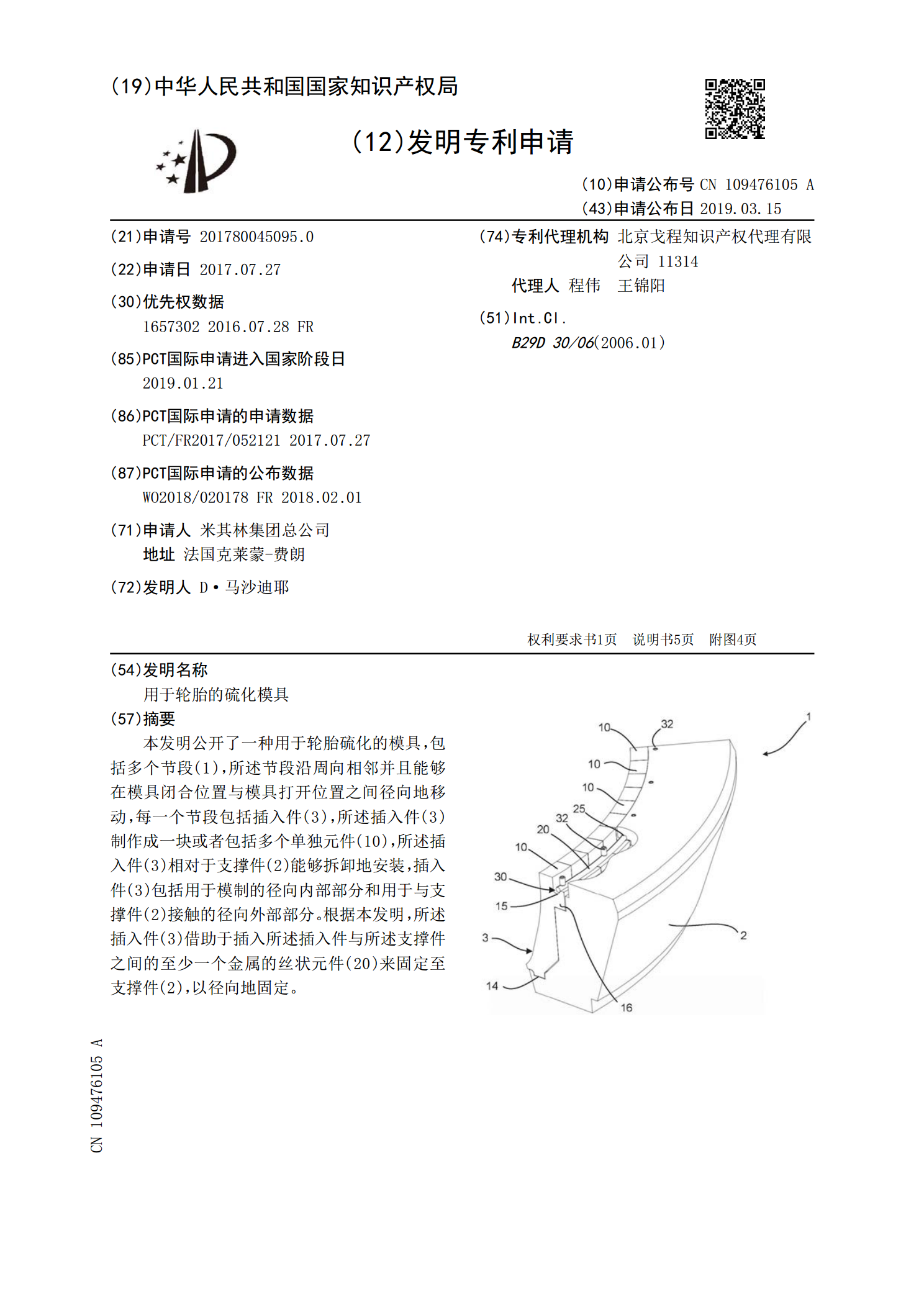
用于轮胎的硫化模具.pdf
本发明公开了一种用于轮胎硫化的模具,包括多个节段(1),所述节段沿周向相邻并且能够在模具闭合位置与模具打开位置之间径向地移动,每一个节段包括插入件(3),所述插入件(3)制作成一块或者包括多个单独元件(10),所述插入件(3)相对于支撑件(2)能够拆卸地安装,插入件(3)包括用于模制的径向内部部分和用于与支撑件(2)接触的径向外部部分。根据本发明,所述插入件(3)借助于插入所述插入件与所述支撑件之间的至少一个金属的丝状元件(20)来固定至支撑件(2),以径向地固定。