
CN2022117403165一种电角度偏移量的校准方法,装置和永磁同步电机.pdf

13****40


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
CN2022117403165一种电角度偏移量的校准方法,装置和永磁同步电机.pdf
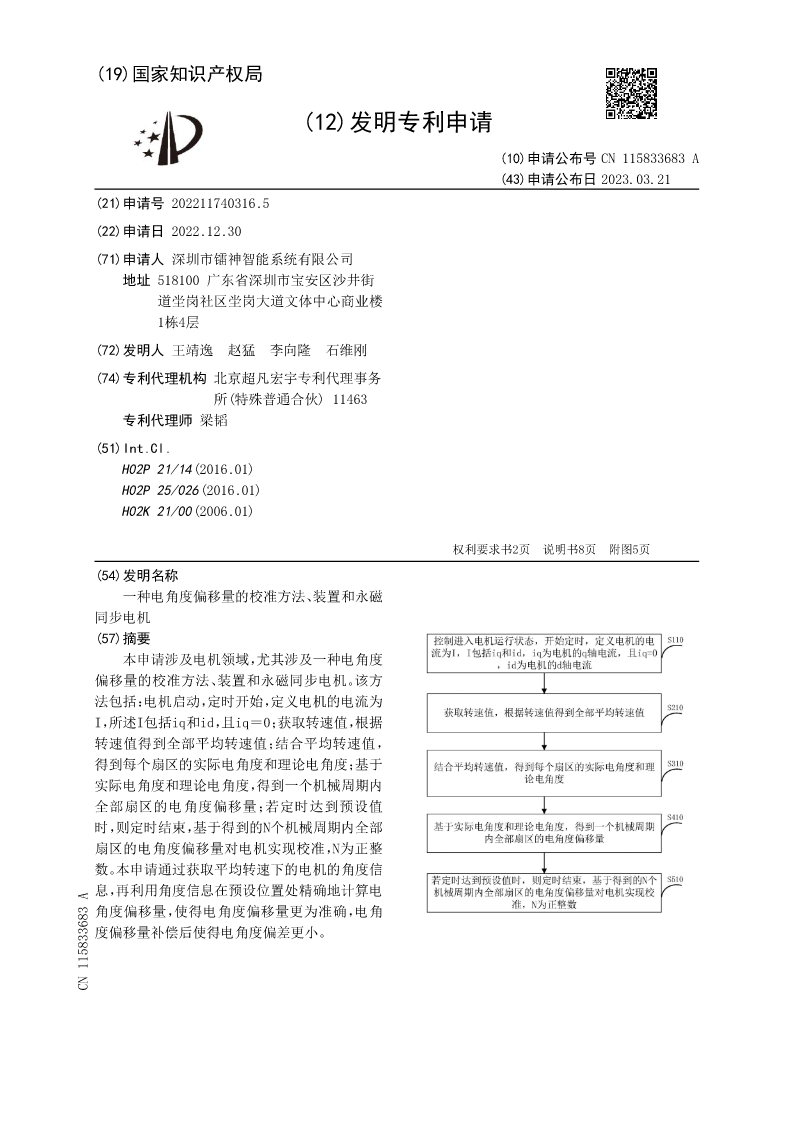
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN115833683A(43)申请公布日2023.03.21(21)申请号202211740316.5(22)申请日2022.12.30(71)申请人深圳市镭神智能系统有限公司地址518100广东省深圳市宝安区沙井街道坣岗社区坣岗大道文体中心商业楼1栋4层(72)发明人王靖逸赵猛李向隆石维刚(74)专利代理机构北京超凡宏宇专利代理事务所(特殊普通合伙)11463专利代理师梁韬(51)Int.Cl.H02P21/14(2016.01)H02P25
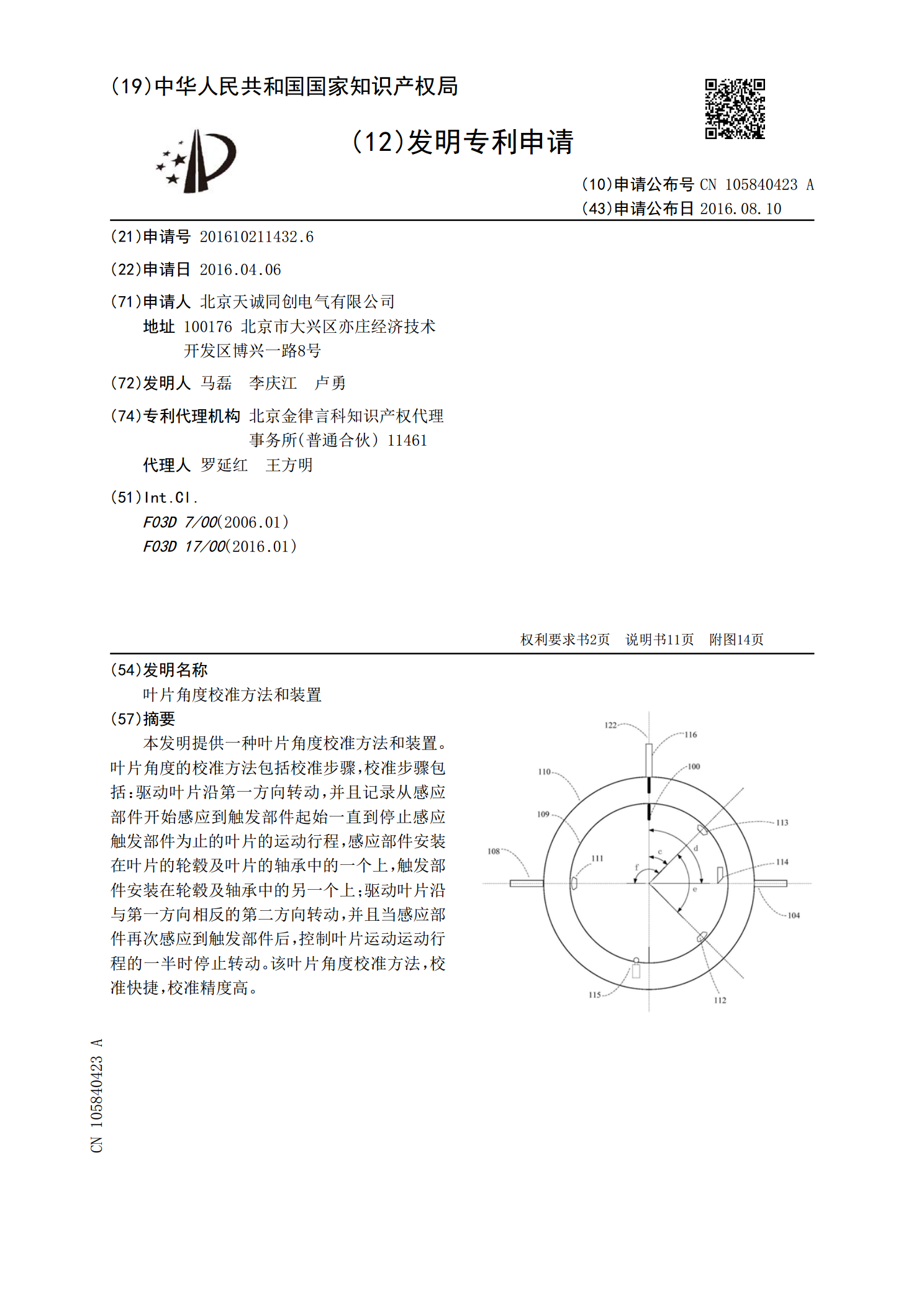
叶片角度校准方法和装置.pdf
本发明提供一种叶片角度校准方法和装置。叶片角度的校准方法包括校准步骤,校准步骤包括:驱动叶片沿第一方向转动,并且记录从感应部件开始感应到触发部件起始一直到停止感应触发部件为止的叶片的运动行程,感应部件安装在叶片的轮毂及叶片的轴承中的一个上,触发部件安装在轮毂及轴承中的另一个上;驱动叶片沿与第一方向相反的第二方向转动,并且当感应部件再次感应到触发部件后,控制叶片运动运动行程的一半时停止转动。该叶片角度校准方法,校准快捷,校准精度高。

一种永磁同步电机角度辨识系统及方法.pdf
本发明公开的一种永磁同步电机角度辨识系统及方法,所述系统包括:锁相环,用于计算得到角度的非周期性直流分量;自适应角度补偿器,用于结合所述角度的非周期性直流分量与误差角度计算得到估计电气角度;微分器,用于对所述估计电气角度进行微分获得估计转速;自适应控制器,用于获得初始周期性角度的三角函数系数进而得到估计周期性角度;积分器,用于获得目标三角函数系数,进而获得目标周期性角度。本发明根据自适应控制原理,实时辨识周期性角度的三角函数系数,进而组合成周期性角度;本发明在控制过程中,将周期性角度与锁相环计算获得的角度

一种校准方法和校准装置.pdf
本申请实施例公开了一种校准方法和校准装置,所述校准方法包括:以结构固定且尺寸已知的标准块作为校准治具,标准块主体一侧面上设有标记结构;利用测量器具采集标准块的结构轮廓;以设有标记结构的标准块主体的侧面沿第一方向和第二方向的轮廓水平校准测量器具;以及将测量得到的标记结构的轮廓尺寸与该标记结构已知实际轮廓尺寸建立关联关系,得到对应的关联系数,根据关联系数调节测量器具以校准测量精度。
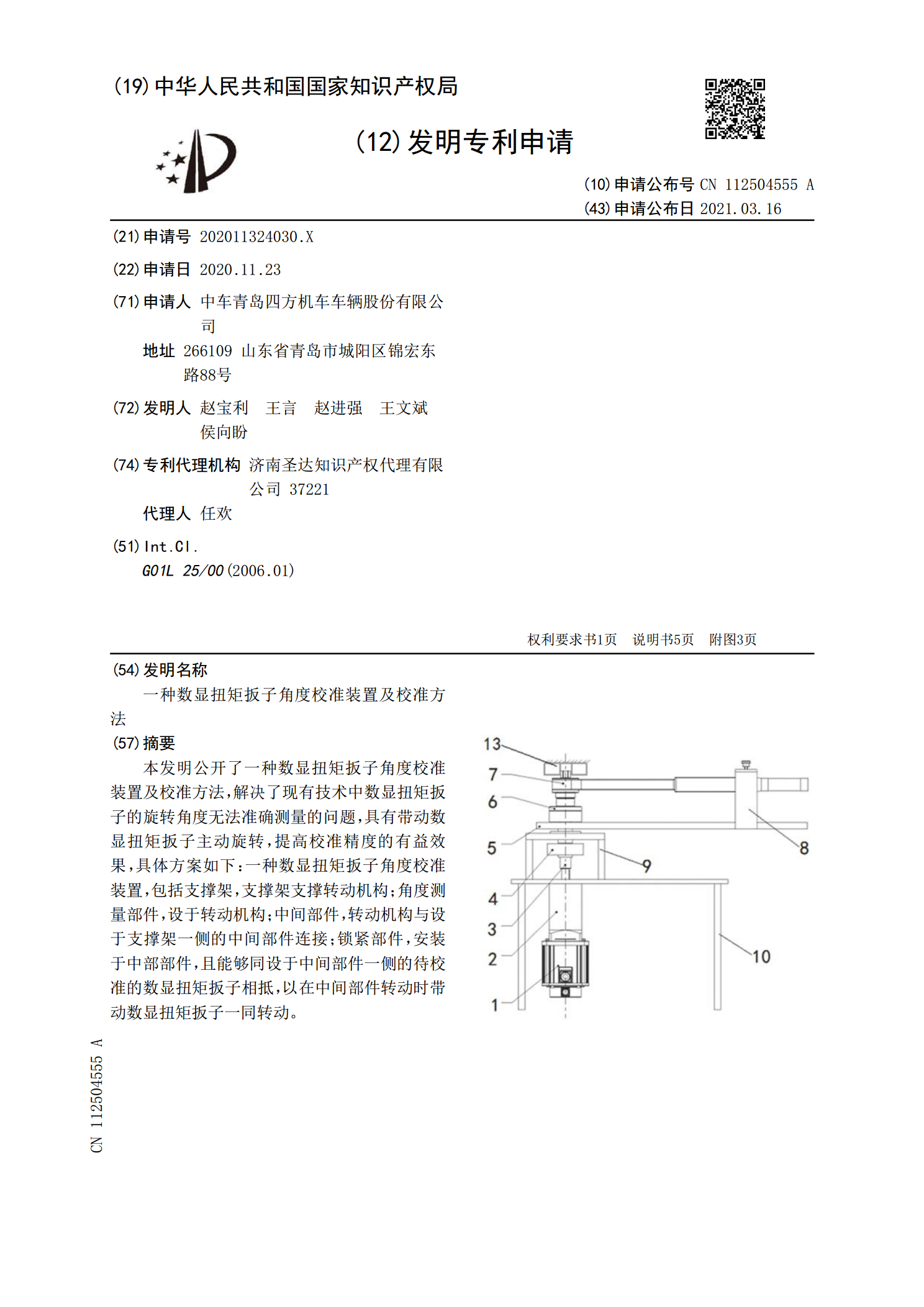
一种数显扭矩扳子角度校准装置及校准方法.pdf
本发明公开了一种数显扭矩扳子角度校准装置及校准方法,解决了现有技术中数显扭矩扳子的旋转角度无法准确测量的问题,具有带动数显扭矩扳子主动旋转,提高校准精度的有益效果,具体方案如下:一种数显扭矩扳子角度校准装置,包括支撑架,支撑架支撑转动机构;角度测量部件,设于转动机构;中间部件,转动机构与设于支撑架一侧的中间部件连接;锁紧部件,安装于中部部件,且能够同设于中间部件一侧的待校准的数显扭矩扳子相抵,以在中间部件转动时带动数显扭矩扳子一同转动。