
第15章 虚位移原理_例题.ppt

kp****93


1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
第15章 虚位移原理_例题.ppt
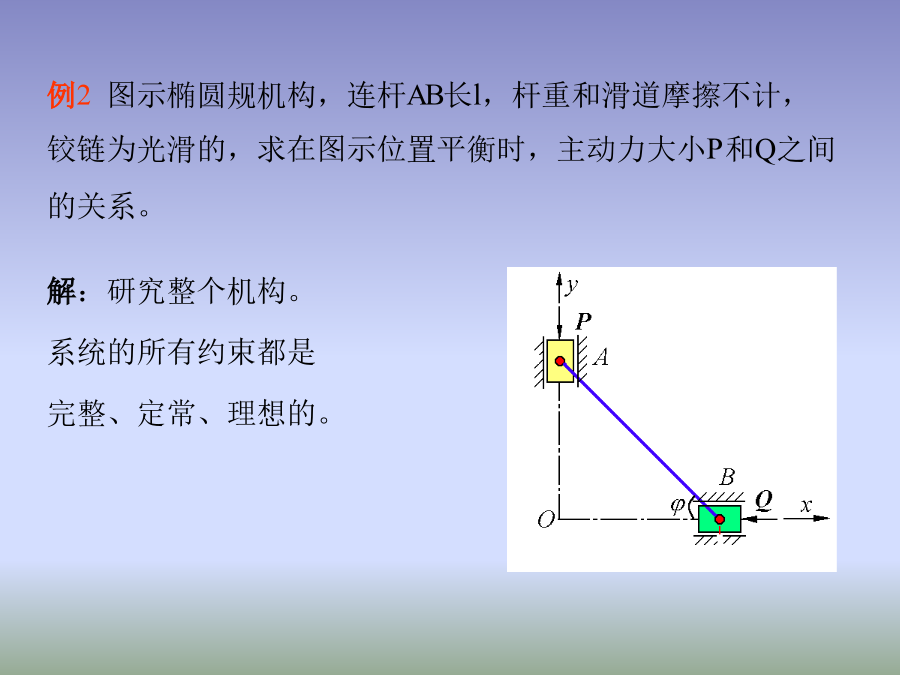
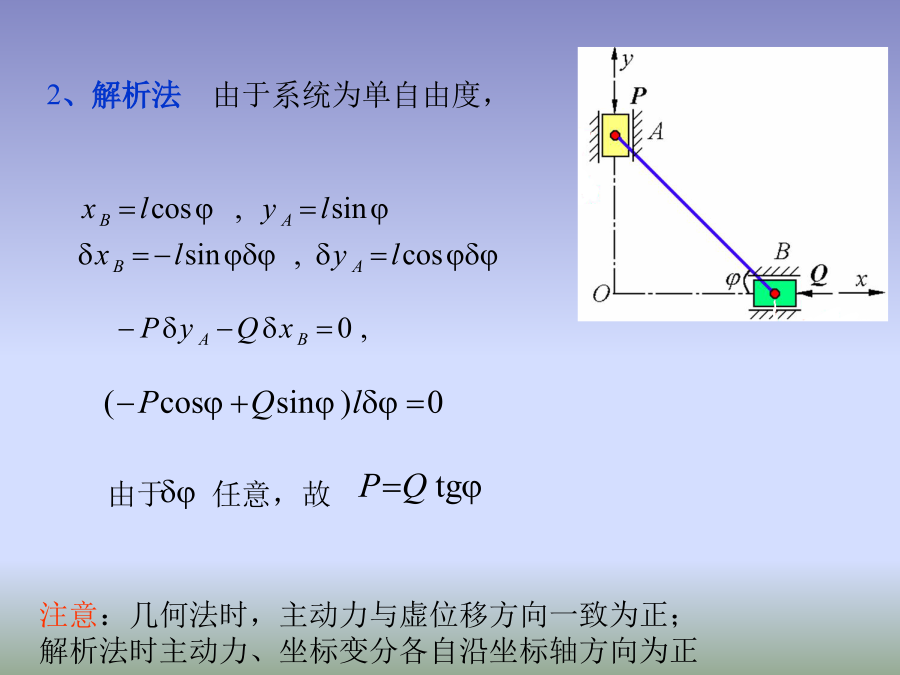
例1:螺旋压榨机中螺杆的螺距为h。如果在手柄上作用一在水平面内的力偶,其力偶矩为2Fl,求平衡时作用于被压榨物体上的压力。(忽略摩擦)解:1、对象:由手柄、螺杆及压板组成的系统2、分析受力:主动力(F,F’)及压板阻力FN3、给系统以虚位移:和,4、列虚功方程:由于是任意的,有:也即:讨论:1)利用约束力不做功避免了所有约束力的出现,这是虚位移原理解题与矢量静力学解题相比的巨大优点。2)本题求虚位移间关系的方法为:由物理关系直接给出法。例2图示椭圆规机构,连杆AB长l,杆重和滑道摩擦不计,铰链为光滑的,求
《虚位移原理》.ppt
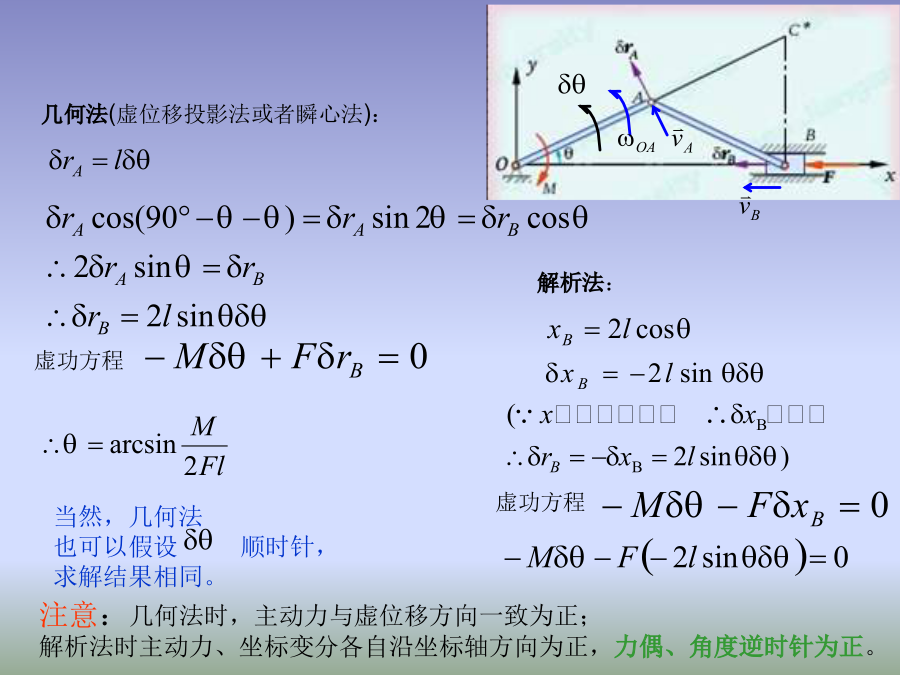
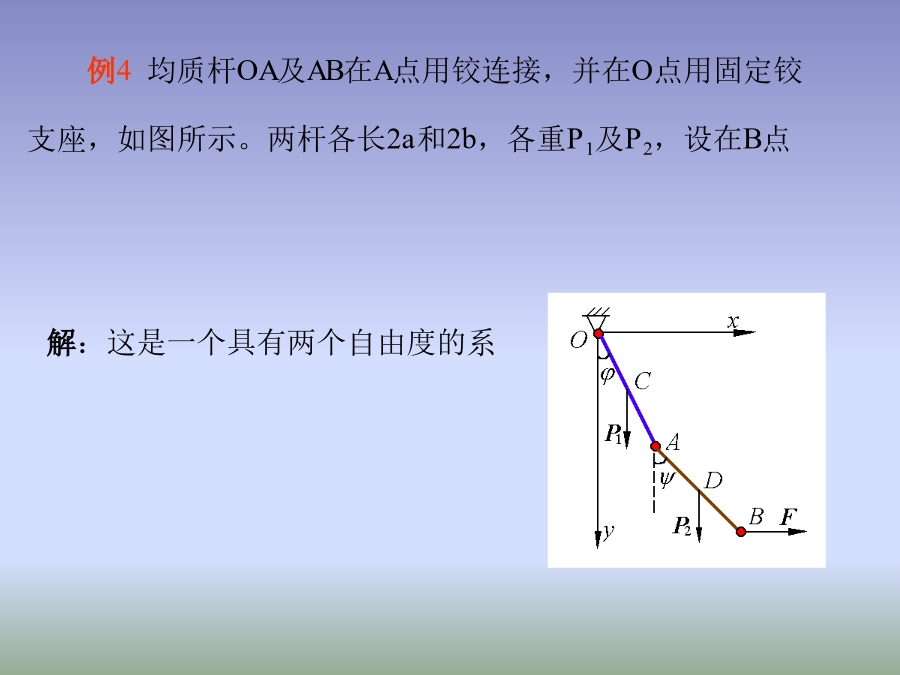
第17章虚位移原理引言§17-1约束及其分类C2.定常约束与非定常约束非定常约束-约束方程中显含时间的约束:3.单面约束与双面约束单面约束——约束方程不能写成等式、但是可以写成不等式的约束。4.完整约束与非完整约束非完整约束——约束方程包含质点速度、且约束方程不可以积分的约束。广义坐标——确定质点系位形的独立参变量。用q1,q2,…表示。§17-3虚位移和理想约束虚位移与实位移的区别和联系2.虚功§17-4虚位移原理∑Fi·ri=0曲柄连杆机构静止在如图所示位置上,已知角度φ和θ。不计机构自身重量,求
虚位移原理0.ppt
第二章变形体虚位移原理预备知识(回顾)线弹性平面问题物理方程平面问题应力边界条件平面问题物理量的矩阵表示基本方程矩阵表示变形体虚位移原理和势能原理变形体虚位移原理和势能原理变形体虚位移时外力功计算变形体虚位移原理和势能原理变形体虚位移时外力功计算变形体虚位移原理和势能原理变形体虚位移时外力功计算变形体虚位移原理和势能原理变形体虚位移时外力功计算变形体虚位移原理和势能原理变形体虚位移时外力功计算变形体虚位移原理和势能原理变形体虚位移时外力功计算变形体虚位移原理和势能原理变形体虚位移时外力功计算变形体虚

理论力学-虚位移原理.ppt
§6–4虚功·理想约束§6-1概述虚位移原理是质点系静力学的普遍原理,它将给出任意质点系平衡的充要条件,这和刚体静力学的平衡条件不同,在那里给出的刚体平衡的充要条件,对于任意质点系的平衡来说只是必要的,但并不是充分的(参阅刚化原理)。非自由质点系的平衡,可以理解为主动力通过约束的平衡。约束的作用在于:而虚位移原理则将利用后一种情况,他通过主动力在约束所许可的位移上的表现(通过功的形式)来给出质点系的平衡条件。§6-2约束和约束方程二、约束方程约束对质点系运动的限制可以通过质点系中各质点的坐标和速度以及时间

理论力学-虚位移原理.ppt
第14章虚位移原理举例:杠杆平衡问题。平衡时F1a=F2b若缓慢转过微小角度f,则s1=fa,s2=fb,由动能定理得:-F1s1+F2s2=0,即F1a=F2b和静力学平衡方程得出的结果完全一样。§14-1约束虚位移虚功举例:3.完整约束与非完整约束约束方程中包含坐标对时间的导数项,且不可积分为有限形式时为非完整约束。4.单面约束与双面约束又称为非固执(单面)约束与固执(双面)约束。约束方程为不等式形式时为单面约束。例:O2.虚位移和实位移的比较(1)大小;(2)方向(是否确定、具体);(3)与约束、时