
车灯随动转向技术方案.doc

kp****93


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车灯随动转向技术方案.doc
www.triv.cn用科技做贡献论文基于lin总线的自动车灯系统技术方案书广州智维电子科技有限公司TRIVELECTRONICTECHNOLOGES一、主要技术指标/主要功能1.1系统功能转动方向盘,末端磁铁根据一定的传动比跟随转动,使角度传感器感应到相应的信号;通过AD转换电路把角度传感器产生的信号输入到主机;主机把输入的角度信号,根据不同的模拟速度,通过运算得出舵机的控制转角值,并通过LIN总线送到左、右从机;左、右从机分别识别到信号ID,并得到不同的转角值,输出特定的脉宽,控制舵机;光电开关识别到
汽车转向车灯随动控制系统.pdf
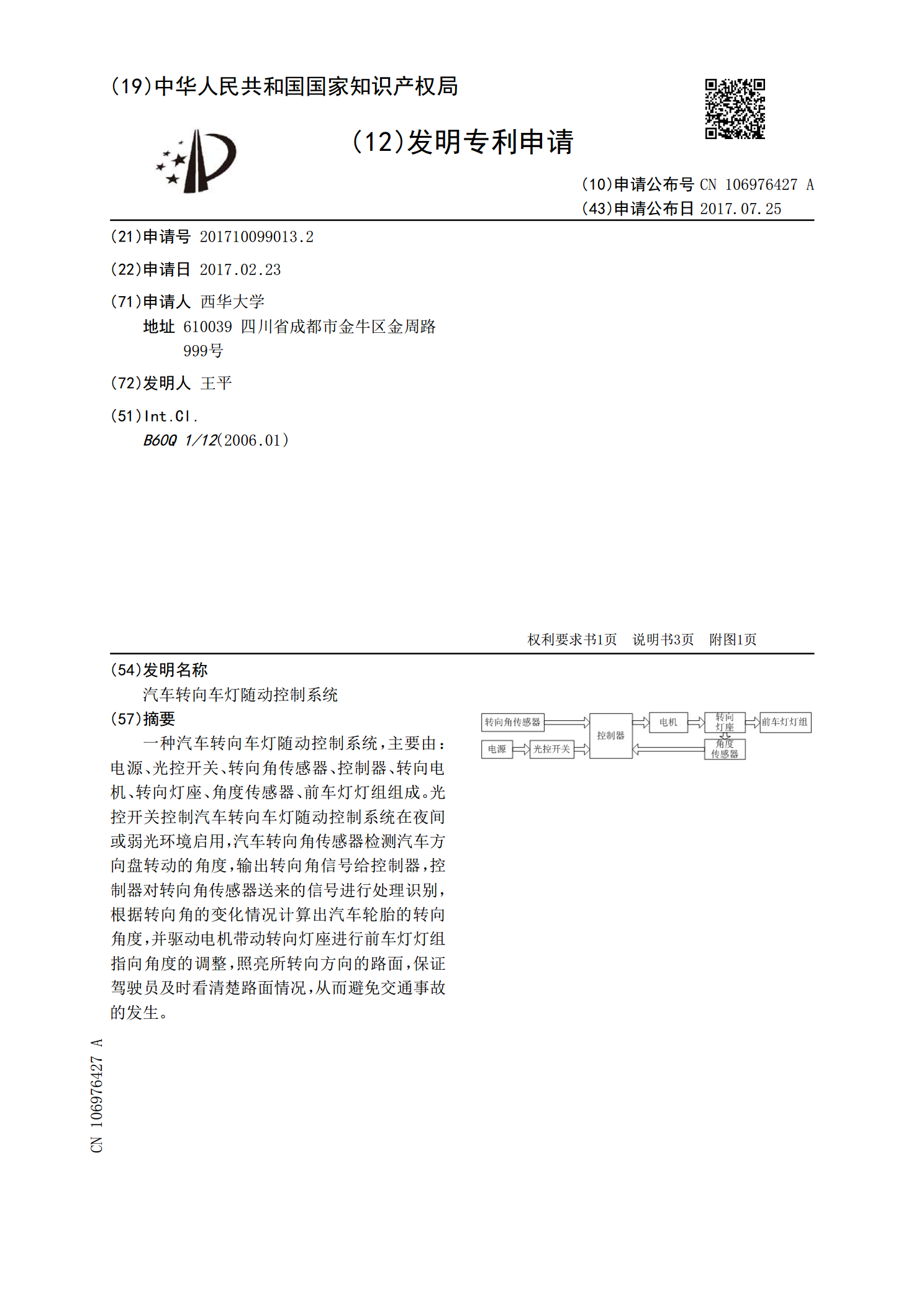
一种汽车转向车灯随动控制系统,主要由:电源、光控开关、转向角传感器、控制器、转向电机、转向灯座、角度传感器、前车灯灯组组成。光控开关控制汽车转向车灯随动控制系统在夜间或弱光环境启用,汽车转向角传感器检测汽车方向盘转动的角度,输出转向角信号给控制器,控制器对转向角传感器送来的信号进行处理识别,根据转向角的变化情况计算出汽车轮胎的转向角度,并驱动电机带动转向灯座进行前车灯灯组指向角度的调整,照亮所转向方向的路面,保证驾驶员及时看清楚路面情况,从而避免交通事故的发生。

随动转向大灯.doc
项目立题:汽车随动转向大灯电子控制系统开发课题背景:随动转向大灯也被称之为自适应大灯(AdaptiveFrontlightingSystem)英文简称AFS,随动转向大灯能够不断对大灯进行动态调节,保持与汽车的当前行驶方向一致,以确保驾驶员在任何时刻都拥有最佳的可见度,而普通大灯具有固定的照射范围,当夜间汽车在弯道上转弯时,由于无法调节照明角度,常常会在弯道内侧出现“盲区”,极大地威胁了驾驶员夜间的安全驾车。随动转向大灯现状:凯旋:随动转向双氙气大灯目前在2.0L车型中,凯旋是唯一配备随动转向双氙气大灯的

随动转向桥专题培训.pptx
随动转向车桥工作原理简介概述随动转向桥(悬架部分)旳构造随动转向车桥构造随动转向桥旳构造随动转向桥旳构造随动转向桥旳构造随动转向桥旳构造随动转向桥旳构造随动转向桥旳构造(高度阀与第二桥共用)进口ZF随动转向桥随动转向桥旳工作原理随动转向桥旳工作原理随动转向桥旳装配技术要求随动转向桥旳安装要求(技术参数)随动转向桥旳验收技术条件在车辆运营中随动转向桥常会出现那些故障现象?出现故障后来我们该怎样进行处理?随动转向桥旳常见故障及处理措施随动转向桥旳常见故障及处理措施随动转向桥旳常见故障及处理措施随动转向桥旳常见
磁动式车灯随动装置及其控制方法.pdf
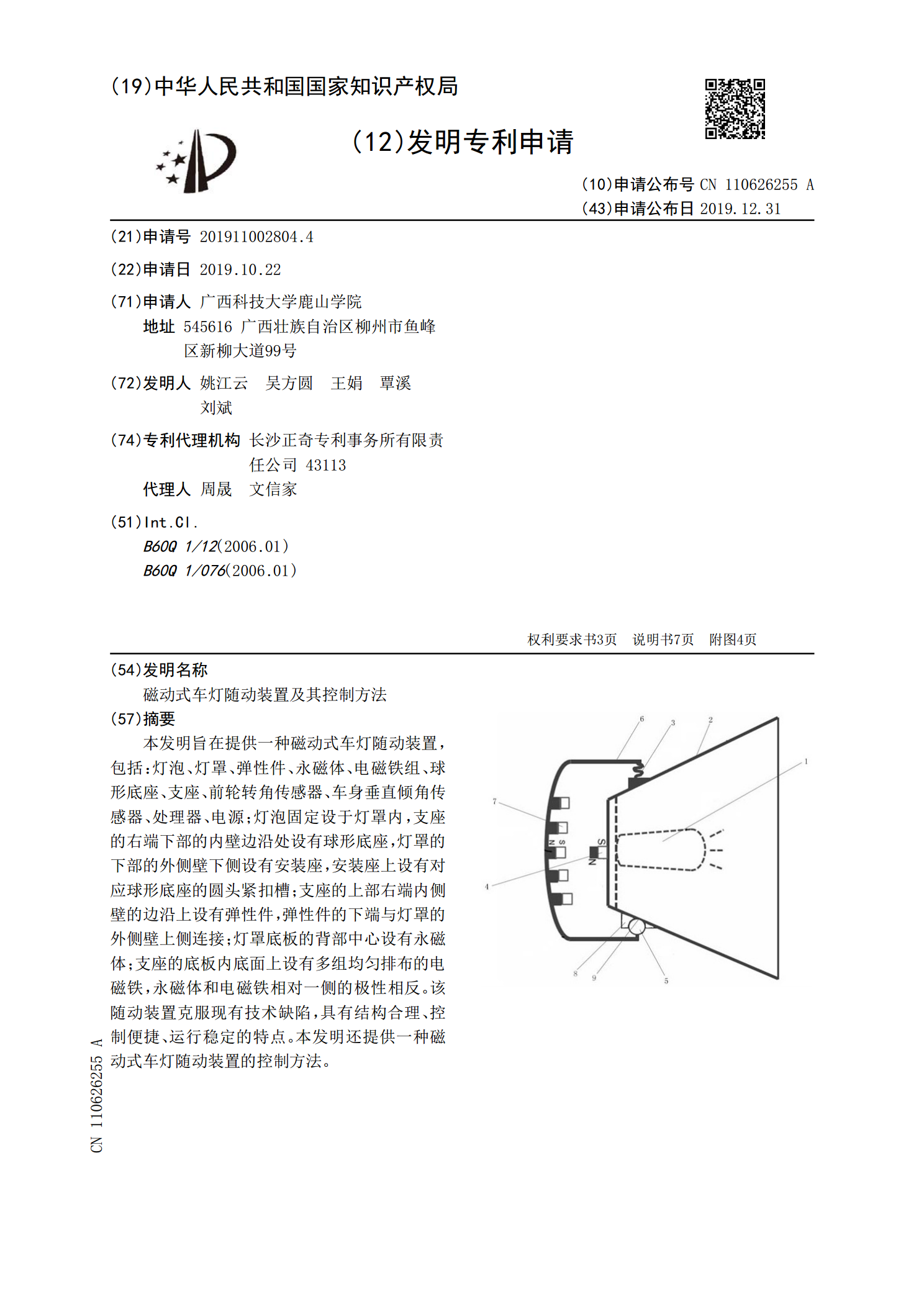
本发明旨在提供一种磁动式车灯随动装置,包括:灯泡、灯罩、弹性件、永磁体、电磁铁组、球形底座、支座、前轮转角传感器、车身垂直倾角传感器、处理器、电源;灯泡固定设于灯罩内,支座的右端下部的内壁边沿处设有球形底座,灯罩的下部的外侧壁下侧设有安装座,安装座上设有对应球形底座的圆头紧扣槽;支座的上部右端内侧壁的边沿上设有弹性件,弹性件的下端与灯罩的外侧壁上侧连接;灯罩底板的背部中心设有永磁体;支座的底板内底面上设有多组均匀排布的电磁铁,永磁体和电磁铁相对一侧的极性相反。该随动装置克服现有技术缺陷,具有结构合理、控制