
自适应巡航系统过弯目标探测与筛选方法、装置及计算机可读存储介质.pdf

书生****瑞梦

1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自适应巡航系统过弯目标探测与筛选方法、装置及计算机可读存储介质.pdf
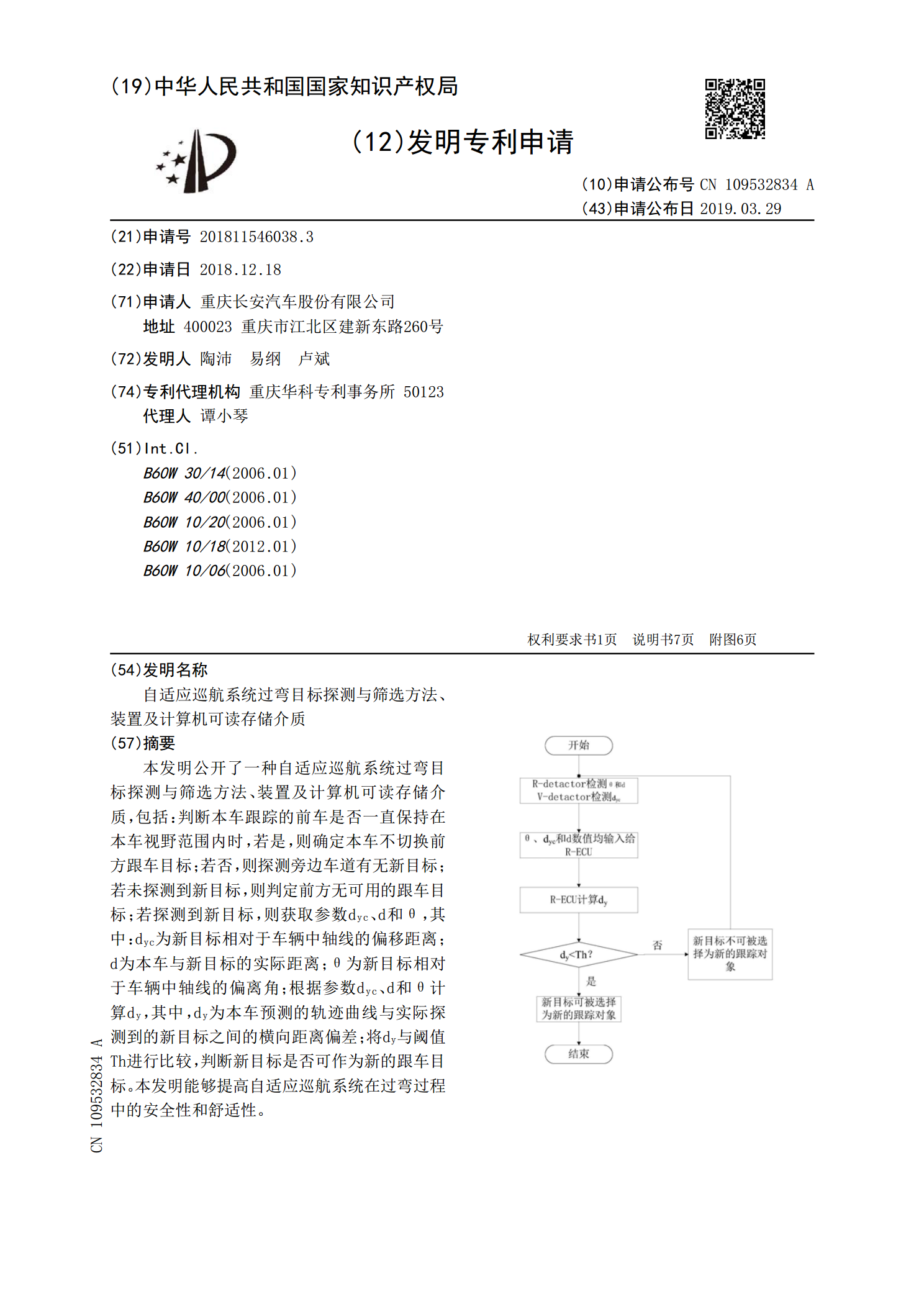
本发明公开了一种自适应巡航系统过弯目标探测与筛选方法、装置及计算机可读存储介质,包括:判断本车跟踪的前车是否一直保持在本车视野范围内时,若是,则确定本车不切换前方跟车目标;若否,则探测旁边车道有无新目标;若未探测到新目标,则判定前方无可用的跟车目标;若探测到新目标,则获取参数d
自适应巡航控制方法、系统、车辆和计算机可读存储介质.pdf
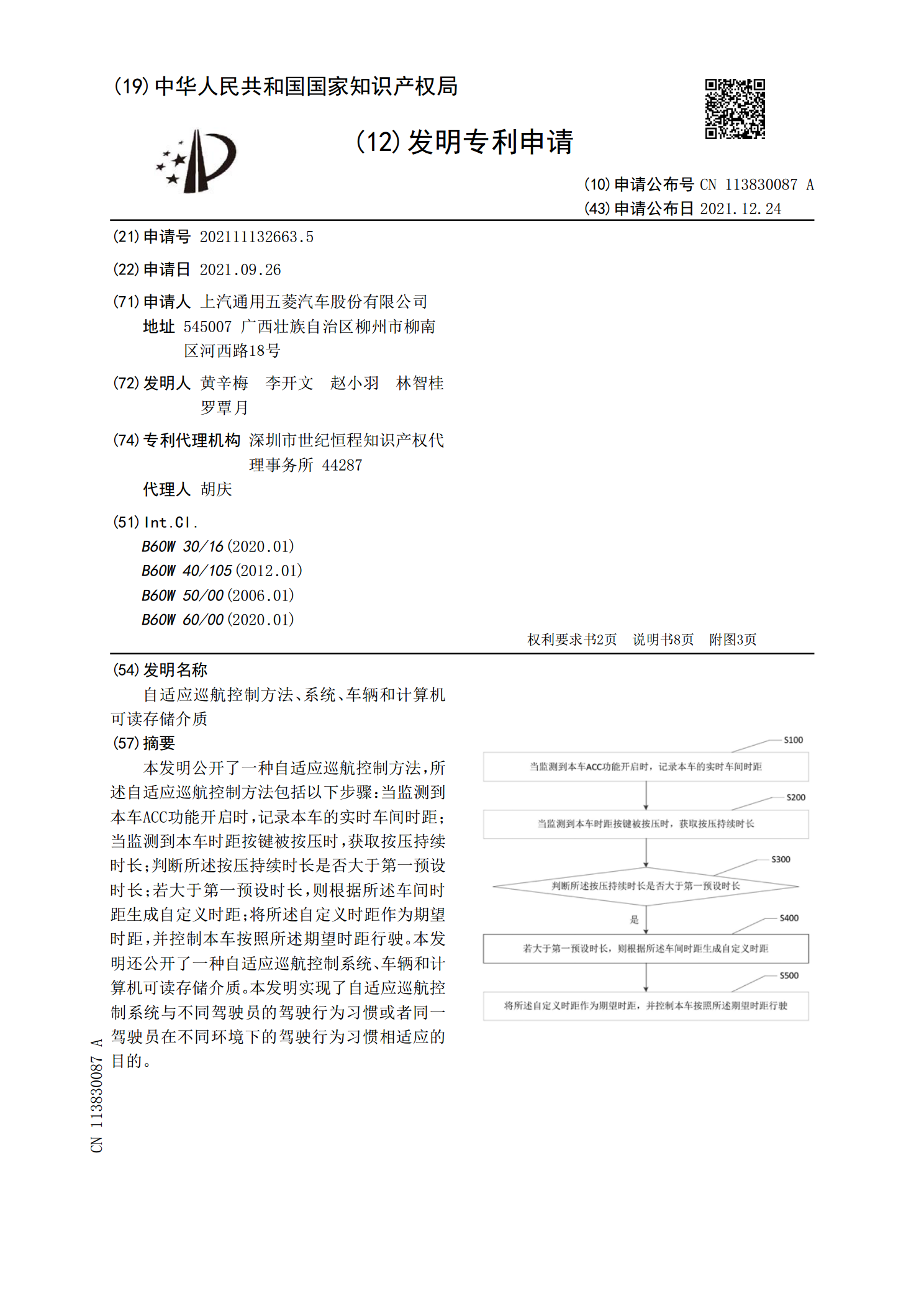
本发明公开了一种自适应巡航控制方法,所述自适应巡航控制方法包括以下步骤:当监测到本车ACC功能开启时,记录本车的实时车间时距;当监测到本车时距按键被按压时,获取按压持续时长;判断所述按压持续时长是否大于第一预设时长;若大于第一预设时长,则根据所述车间时距生成自定义时距;将所述自定义时距作为期望时距,并控制本车按照所述期望时距行驶。本发明还公开了一种自适应巡航控制系统、车辆和计算机可读存储介质。本发明实现了自适应巡航控制系统与不同驾驶员的驾驶行为习惯或者同一驾驶员在不同环境下的驾驶行为习惯相适应的目的。
光电感烟探测方法、探测装置及计算机可读存储介质.pdf
本发明提供的光电感烟探测方法、探测装置及计算机可读存储介质,实时采集光敏接收电路的输出信号值,采用设定的第一阈值来判断迷宫内是否有烟雾进入,采用设定的第二阈值作为报警漂移补偿值,可以修正报警阈值,减小灰尘对报警的影响,提高报警的灵敏度,同时,还可以根据输出信号值来修正第二阈值的取值。采用灰尘补偿的方式,通过理论的算法就可以减小灰尘对报警阈值的影响,不需要经常性的清理迷宫,使用方便。
车辆巡航控制方法、装置、车辆及可读存储介质.pdf
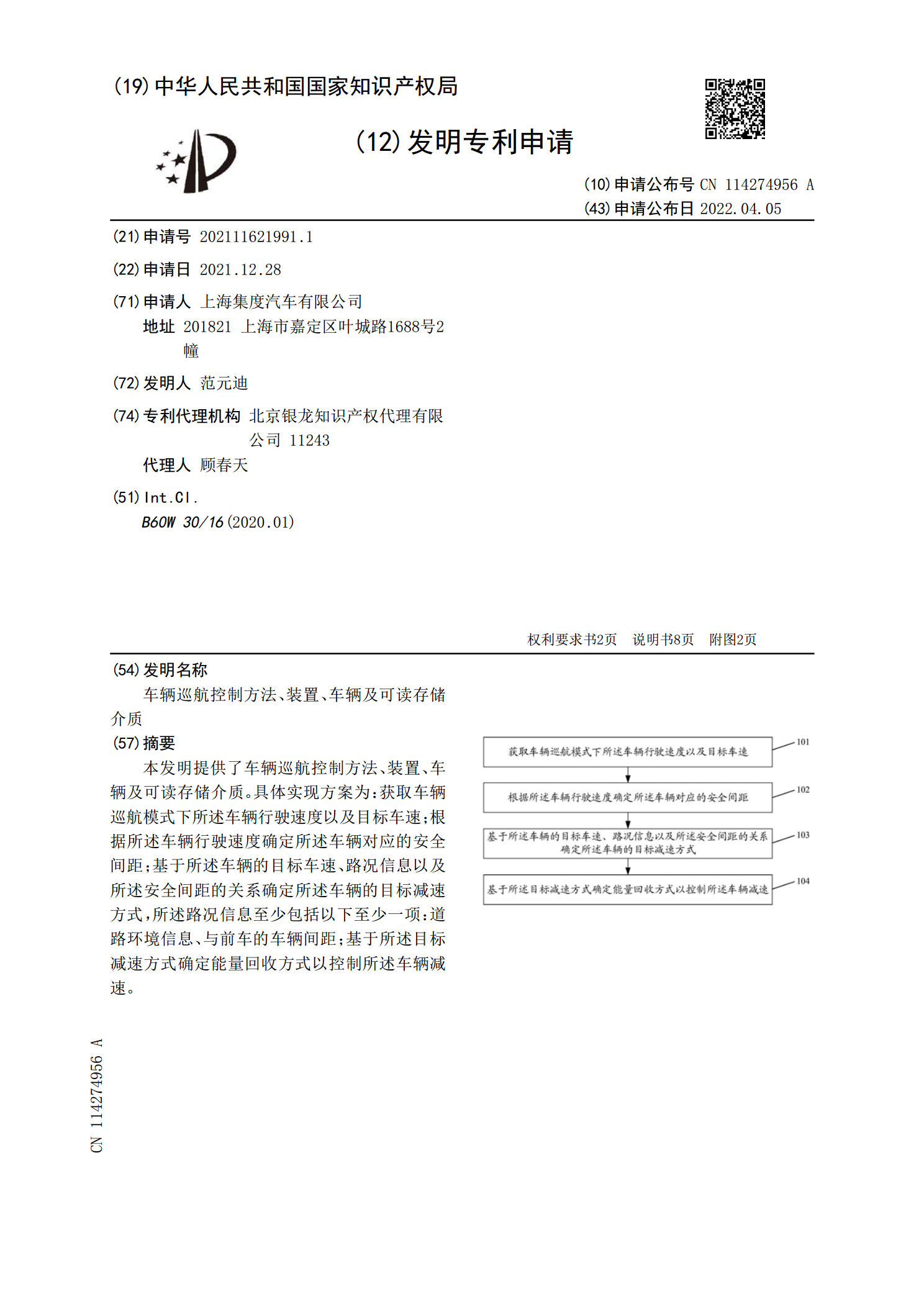
本发明提供了车辆巡航控制方法、装置、车辆及可读存储介质。具体实现方案为:获取车辆巡航模式下所述车辆行驶速度以及目标车速;根据所述车辆行驶速度确定所述车辆对应的安全间距;基于所述车辆的目标车速、路况信息以及所述安全间距的关系确定所述车辆的目标减速方式,所述路况信息至少包括以下至少一项:道路环境信息、与前车的车辆间距;基于所述目标减速方式确定能量回收方式以控制所述车辆减速。
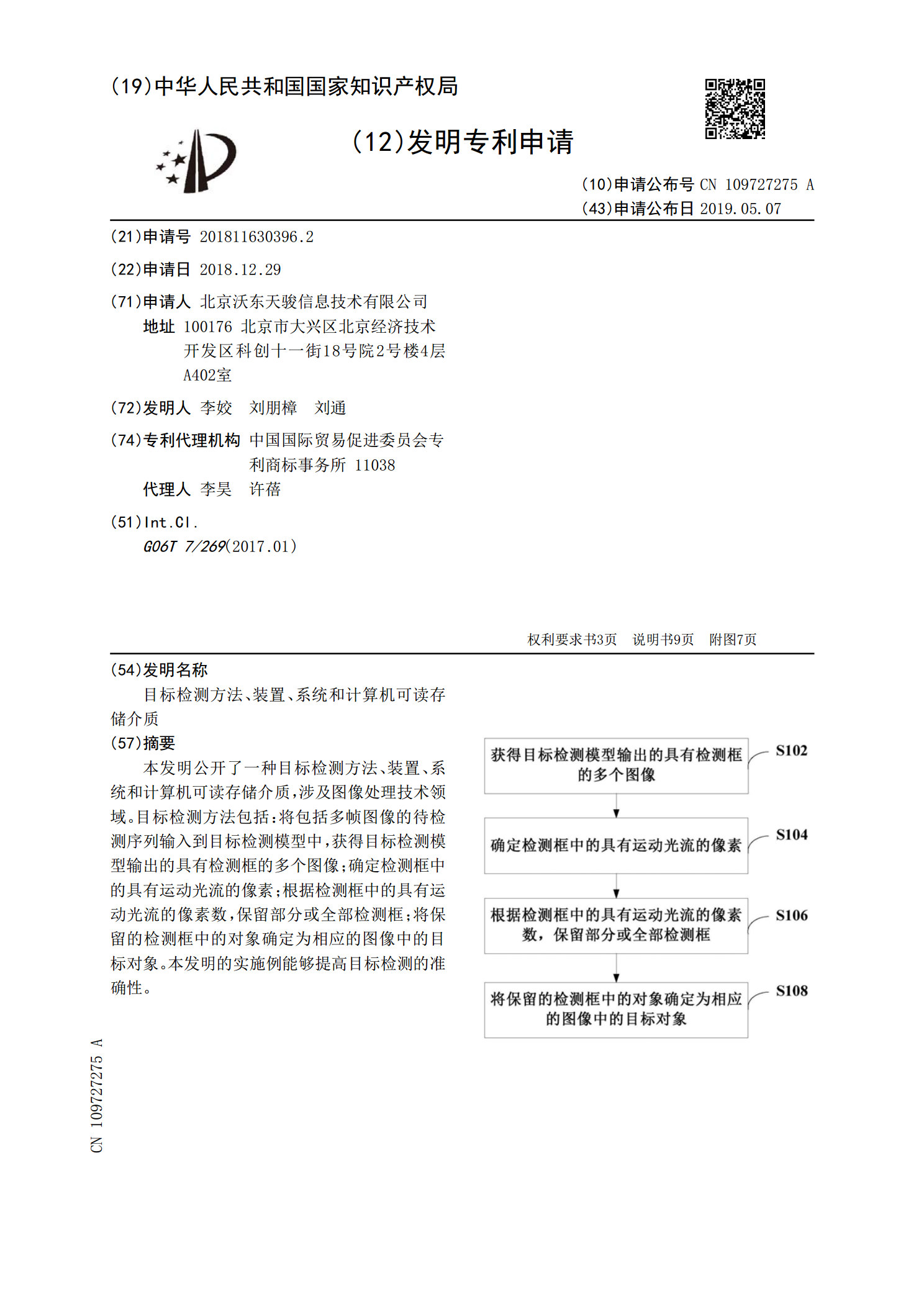
目标检测方法、装置、系统和计算机可读存储介质.pdf
本发明公开了一种目标检测方法、装置、系统和计算机可读存储介质,涉及图像处理技术领域。目标检测方法包括:将包括多帧图像的待检测序列输入到目标检测模型中,获得目标检测模型输出的具有检测框的多个图像;确定检测框中的具有运动光流的像素;根据检测框中的具有运动光流的像素数,保留部分或全部检测框;将保留的检测框中的对象确定为相应的图像中的目标对象。本发明的实施例能够提高目标检测的准确性。