
自适应巡航控制方法、系统、车辆和计算机可读存储介质.pdf

文宣****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自适应巡航控制方法、系统、车辆和计算机可读存储介质.pdf
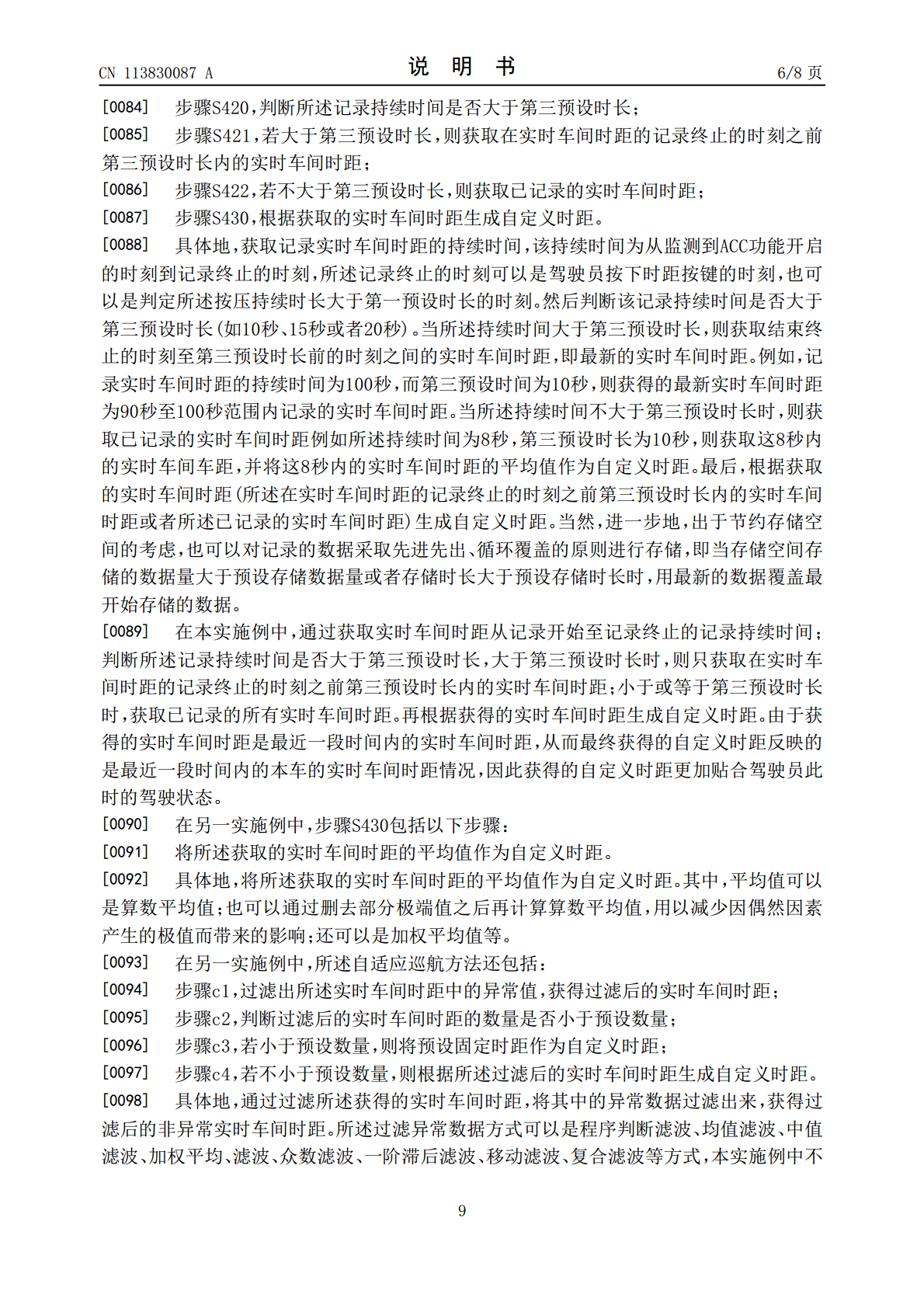
本发明公开了一种自适应巡航控制方法,所述自适应巡航控制方法包括以下步骤:当监测到本车ACC功能开启时,记录本车的实时车间时距;当监测到本车时距按键被按压时,获取按压持续时长;判断所述按压持续时长是否大于第一预设时长;若大于第一预设时长,则根据所述车间时距生成自定义时距;将所述自定义时距作为期望时距,并控制本车按照所述期望时距行驶。本发明还公开了一种自适应巡航控制系统、车辆和计算机可读存储介质。本发明实现了自适应巡航控制系统与不同驾驶员的驾驶行为习惯或者同一驾驶员在不同环境下的驾驶行为习惯相适应的目的。
车辆巡航控制方法、装置、车辆及可读存储介质.pdf
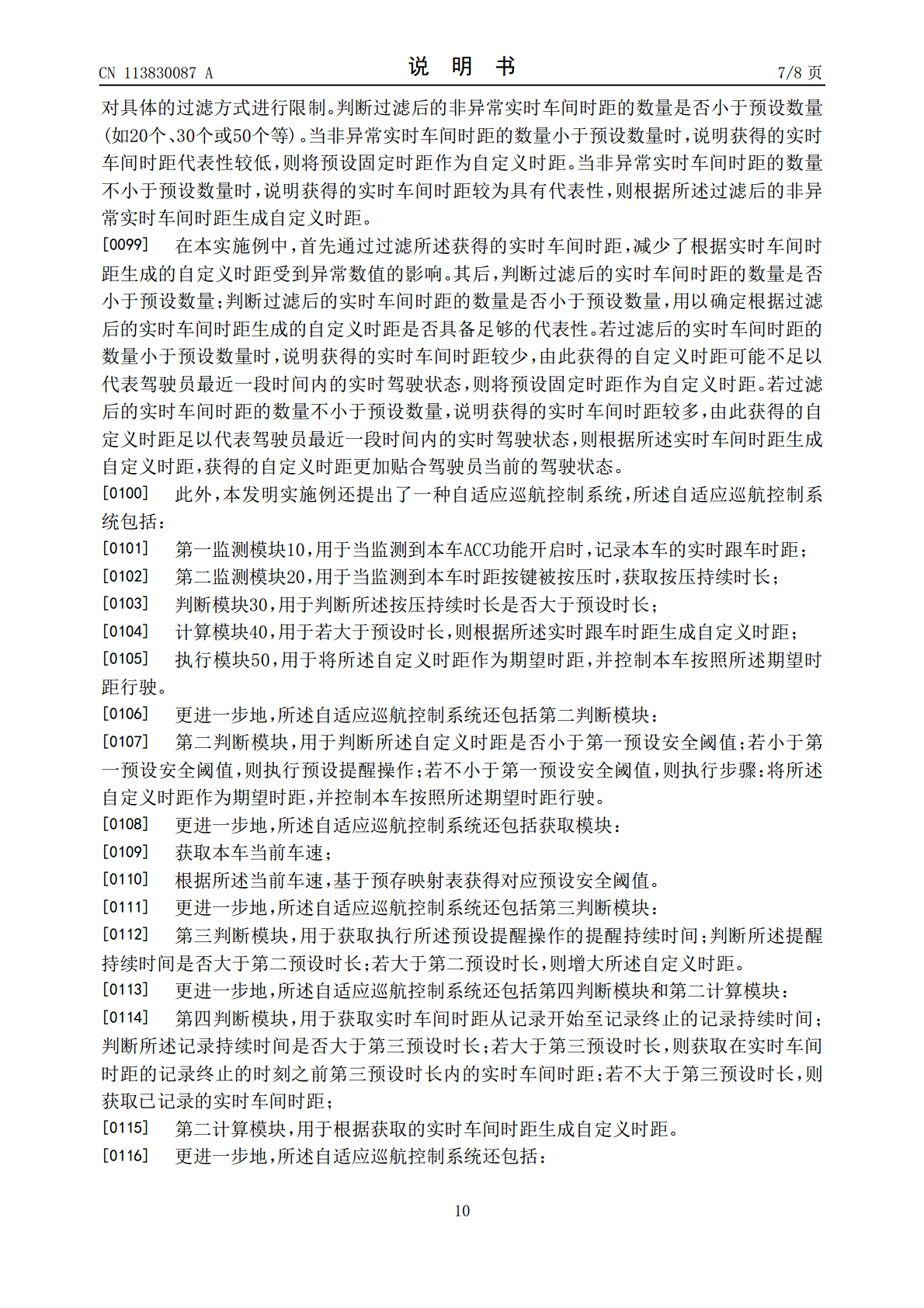
本发明提供了车辆巡航控制方法、装置、车辆及可读存储介质。具体实现方案为:获取车辆巡航模式下所述车辆行驶速度以及目标车速;根据所述车辆行驶速度确定所述车辆对应的安全间距;基于所述车辆的目标车速、路况信息以及所述安全间距的关系确定所述车辆的目标减速方式,所述路况信息至少包括以下至少一项:道路环境信息、与前车的车辆间距;基于所述目标减速方式确定能量回收方式以控制所述车辆减速。

集成式自适应巡航系统智慧偏移控制方法、系统、车辆及存储介质.pdf
本发明公开的集成式自适应巡航系统智慧偏移控制方法、系统、车辆及存储介质,通过优化集成式自适应巡航系统的横向控制策略,以智慧偏移的方式,在合法合规的前提下,可有效降低行驶过程中的安全风险。该方法包括,判断邻道目标车辆与本车的碰撞时间和横向间距是否小于逻辑触发的安全距离阈值;若未小于安全距离阈值,则继续在当前车道对中行驶;若小于安全距离,往远离邻道目标车辆的方向横向偏移一定距离,同时,视两车横向距离情况,本车进行适当减速;当两车无碰撞风险后,本车分两段回偏,直至对中行驶。同时,在智慧偏移过程中通过向控制器发送
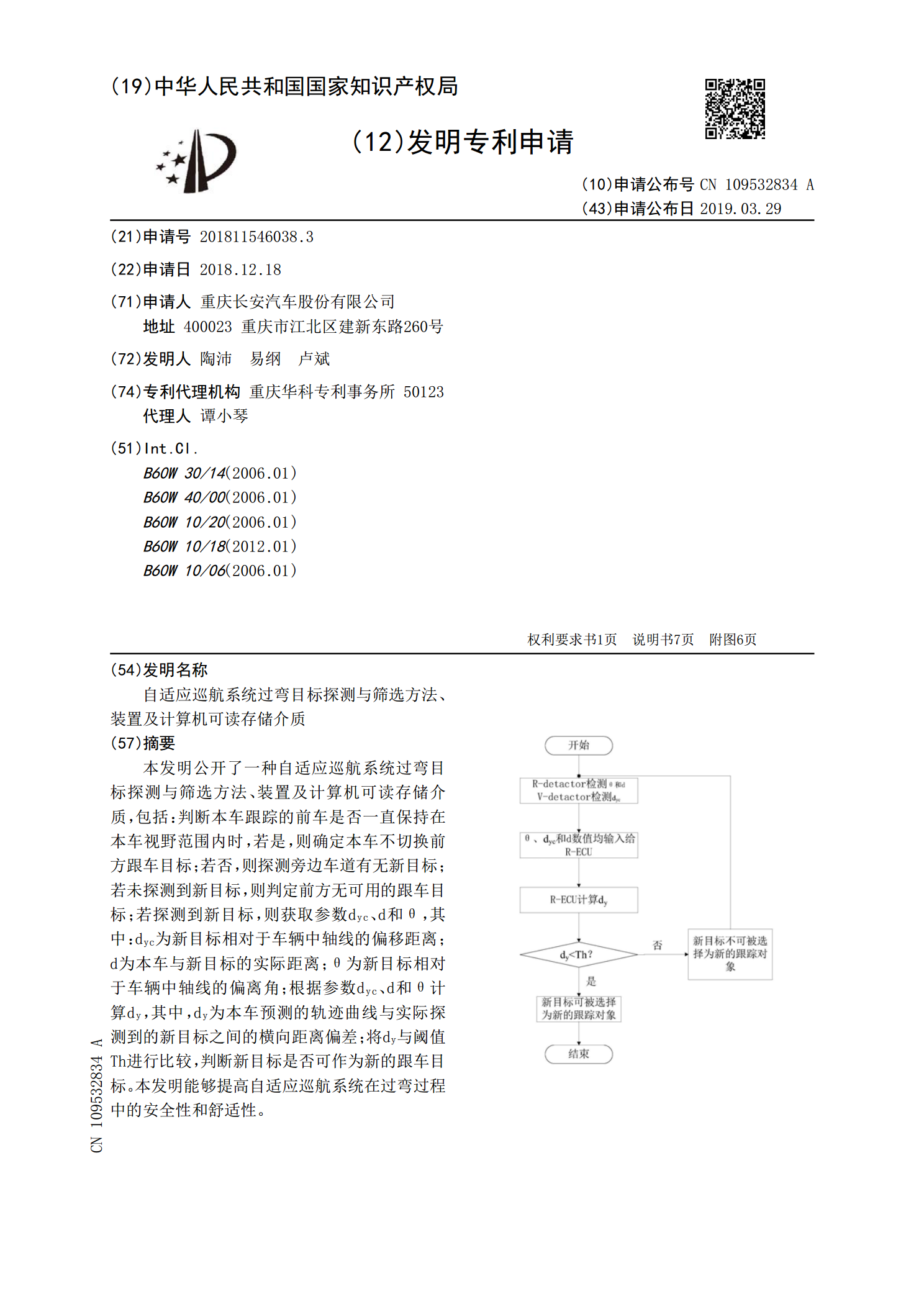
自适应巡航系统过弯目标探测与筛选方法、装置及计算机可读存储介质.pdf
本发明公开了一种自适应巡航系统过弯目标探测与筛选方法、装置及计算机可读存储介质,包括:判断本车跟踪的前车是否一直保持在本车视野范围内时,若是,则确定本车不切换前方跟车目标;若否,则探测旁边车道有无新目标;若未探测到新目标,则判定前方无可用的跟车目标;若探测到新目标,则获取参数d
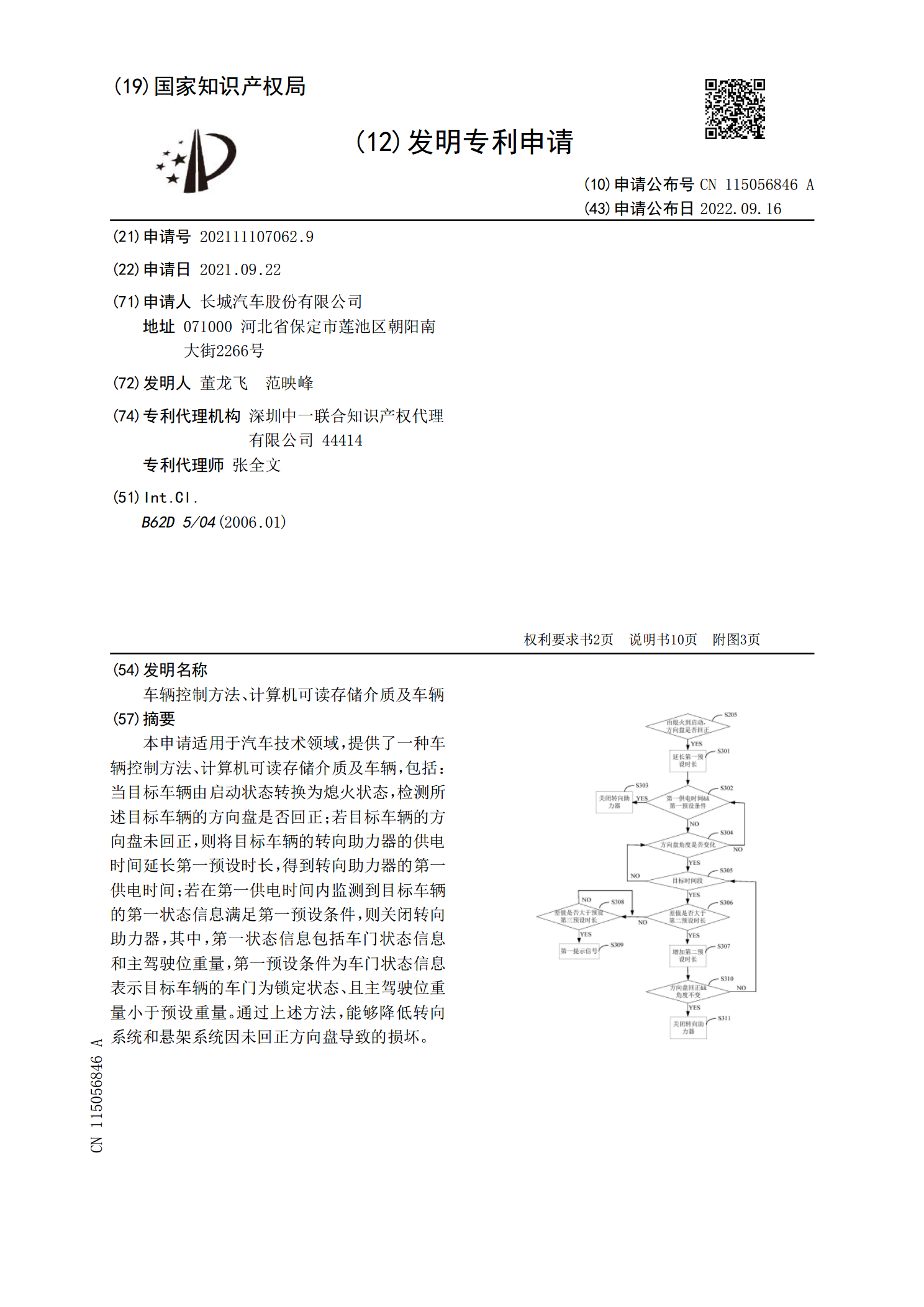
车辆控制方法、计算机可读存储介质及车辆.pdf
本申请适用于汽车技术领域,提供了一种车辆控制方法、计算机可读存储介质及车辆,包括:当目标车辆由启动状态转换为熄火状态,检测所述目标车辆的方向盘是否回正;若目标车辆的方向盘未回正,则将目标车辆的转向助力器的供电时间延长第一预设时长,得到转向助力器的第一供电时间;若在第一供电时间内监测到目标车辆的第一状态信息满足第一预设条件,则关闭转向助力器,其中,第一状态信息包括车门状态信息和主驾驶位重量,第一预设条件为车门状态信息表示目标车辆的车门为锁定状态、且主驾驶位重量小于预设重量。通过上述方法,能够降低转向系统和悬