
一种加速度辅助机车雷达测速滤波方法.pdf

春兰****89

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种加速度辅助机车雷达测速滤波方法.pdf
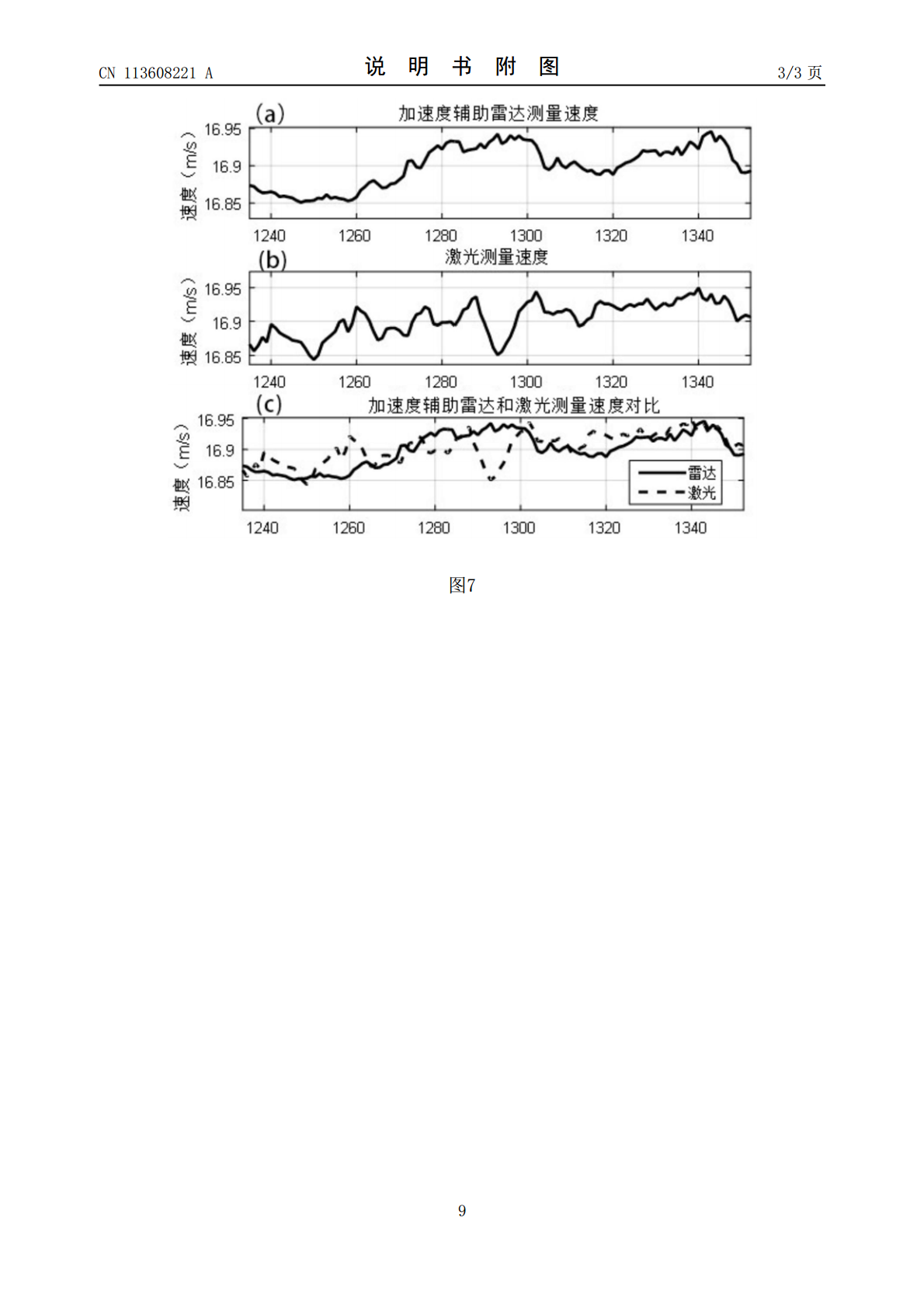
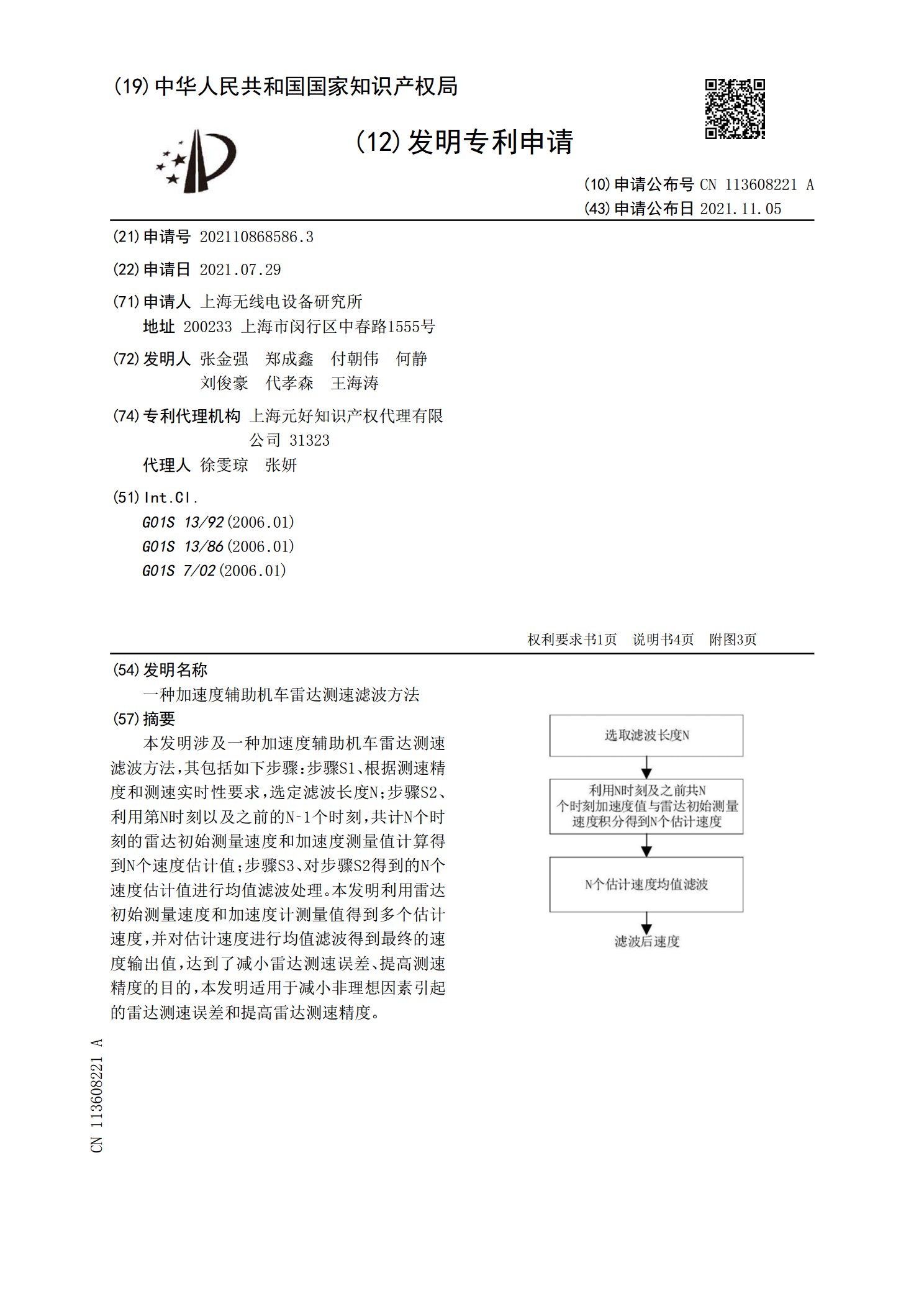
本发明涉及一种加速度辅助机车雷达测速滤波方法,其包括如下步骤:步骤S1、根据测速精度和测速实时性要求,选定滤波长度N;步骤S2、利用第N时刻以及之前的N‑1个时刻,共计N个时刻的雷达初始测量速度和加速度测量值计算得到N个速度估计值;步骤S3、对步骤S2得到的N个速度估计值进行均值滤波处理。本发明利用雷达初始测量速度和加速度计测量值得到多个估计速度,并对估计速度进行均值滤波得到最终的速度输出值,达到了减小雷达测速误差、提高测速精度的目的,本发明适用于减小非理想因素引起的雷达测速误差和提高雷达测速精度。

基于自适应卡尔曼滤波的机车雷达测速方法.pdf
本发明属于雷达近场测量技术领域,特别涉及基于自适应卡尔曼滤波的机车雷达测速方法,其具体步骤为:(1)计算回波的功率谱;(2)抑制低频干扰;(3)利用频谱重心法预估机车多普勒频率;(4)进行雷达位置自校准与速度解算;(5)利用自适应卡尔曼滤波器进行滤波;(6)机车速度输出。本发明可实现机车速度的实时测量,测量速度无滞后,测量精度高。
一种多普勒雷达辅助GPS/INS车辆测速方法.pdf
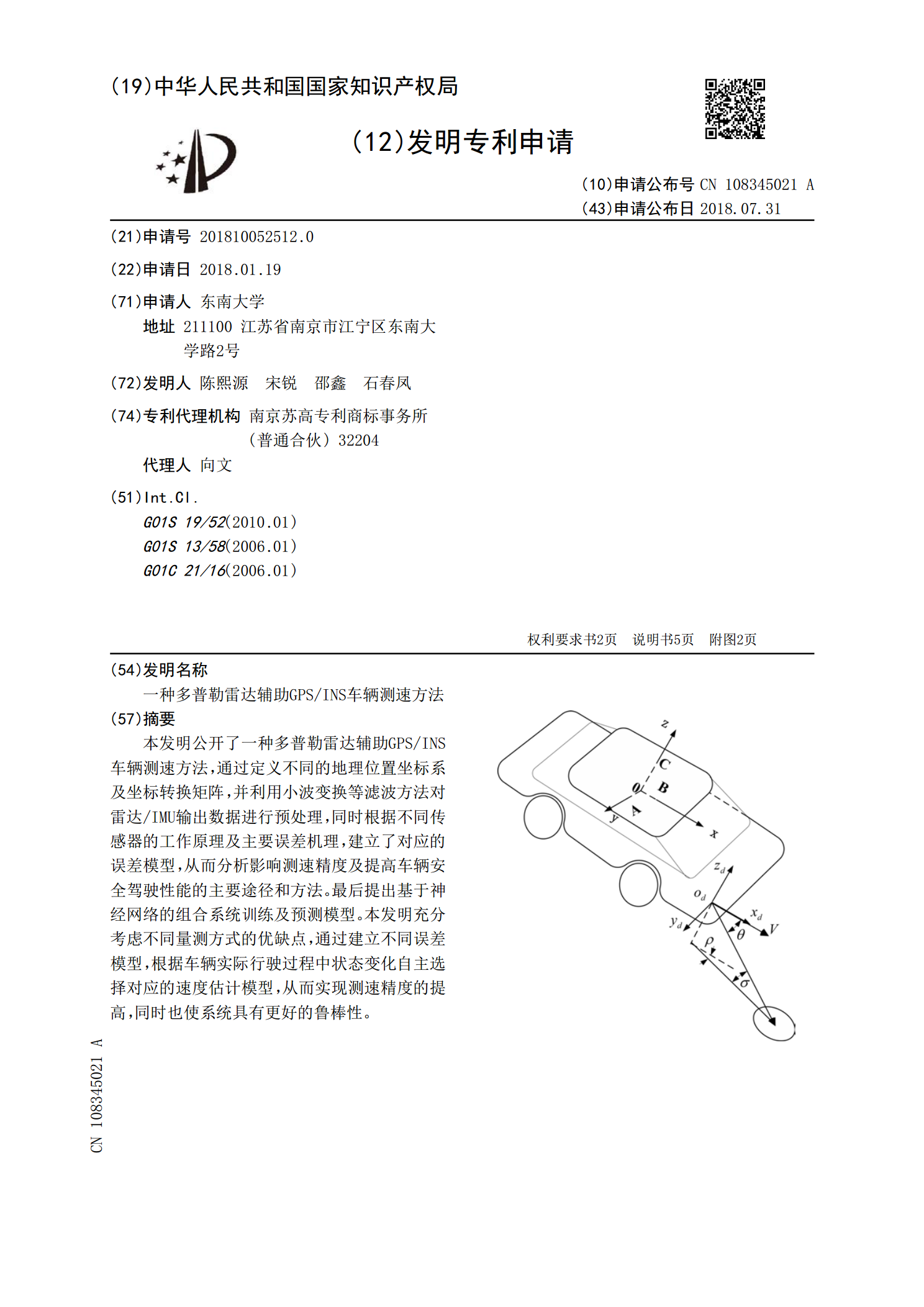
本发明公开了一种多普勒雷达辅助GPS/INS车辆测速方法,通过定义不同的地理位置坐标系及坐标转换矩阵,并利用小波变换等滤波方法对雷达/IMU输出数据进行预处理,同时根据不同传感器的工作原理及主要误差机理,建立了对应的误差模型,从而分析影响测速精度及提高车辆安全驾驶性能的主要途径和方法。最后提出基于神经网络的组合系统训练及预测模型。本发明充分考虑不同量测方式的优缺点,通过建立不同误差模型,根据车辆实际行驶过程中状态变化自主选择对应的速度估计模型,从而实现测速精度的提高,同时也使系统具有更好的鲁棒性。

基于双路自适应采样滤波的铁路机车测速方法.pdf
本发明公开了一种基于双路自适应采样滤波的铁路机车测速方法,利用FFT或者是BURG算法求解出两路接收数据频谱最大值对应的频率,即起始频率f01和f02;然后利用新的采样率fnew对两路接收数据进行采样;比较两路接收数据能量,提取误差能量符号,进而更新采样率fnew,以此循环直至收敛找到交叉点频率fk,求得列车速度。本发明利用凸优化技术对两个不同角度天线接收的多普勒信号处理,能够有效避免单个多普勒信号频谱路基函数引起的误差,而且通过自适应改变数据采样率实现双路多普勒频谱交叉点频率的滤波提取,从而高精度测算铁

一种基于交通测速雷达的自检方法及交通测速雷达.pdf
本发明的一种基于交通测速雷达的自检方法及交通测速雷达,该方法包括:步骤S1:当测速雷达不输出目标时间达到上位机设定阀值时,触发自检功能工作;步骤S2:在测速雷达进行检测过程中,判断是否有回波数据,如果有,则认定为雷达正常工作,跳出自检;如果没有回波数据,则计数器进行计数叠加,当计数累计值未达到设定值时,保留计数值,继续进行下一次自检工作;当计数累计值达到设定值时,启动下一步自检;步骤S3:校对数据存储情况;将存储的数据读入信号处理流程中,和预先设定的结果进行比对;根据比对结果判定交通测速雷达的状态。该交通