
视觉定位恢复方法、装置、机器人和可读存储介质.pdf

光誉****君哥

1/10
2/10
3/10

4/10

5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
视觉定位恢复方法、装置、机器人和可读存储介质.pdf
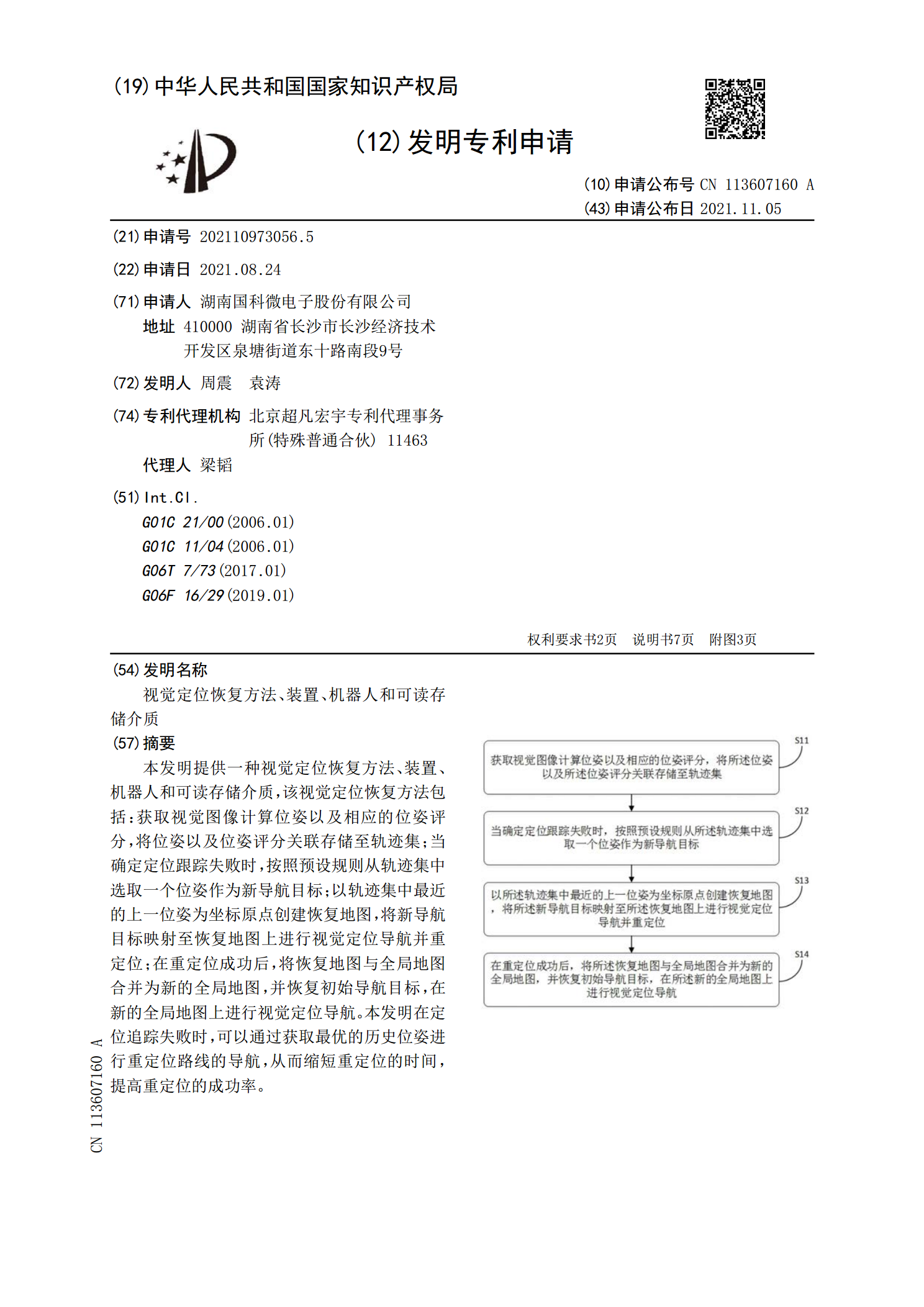
本发明提供一种视觉定位恢复方法、装置、机器人和可读存储介质,该视觉定位恢复方法包括:获取视觉图像计算位姿以及相应的位姿评分,将位姿以及位姿评分关联存储至轨迹集;当确定定位跟踪失败时,按照预设规则从轨迹集中选取一个位姿作为新导航目标;以轨迹集中最近的上一位姿为坐标原点创建恢复地图,将新导航目标映射至恢复地图上进行视觉定位导航并重定位;在重定位成功后,将恢复地图与全局地图合并为新的全局地图,并恢复初始导航目标,在新的全局地图上进行视觉定位导航。本发明在定位追踪失败时,可以通过获取最优的历史位姿进行重定位路线的
拍摄方法及装置、机器人和可读存储介质.pdf
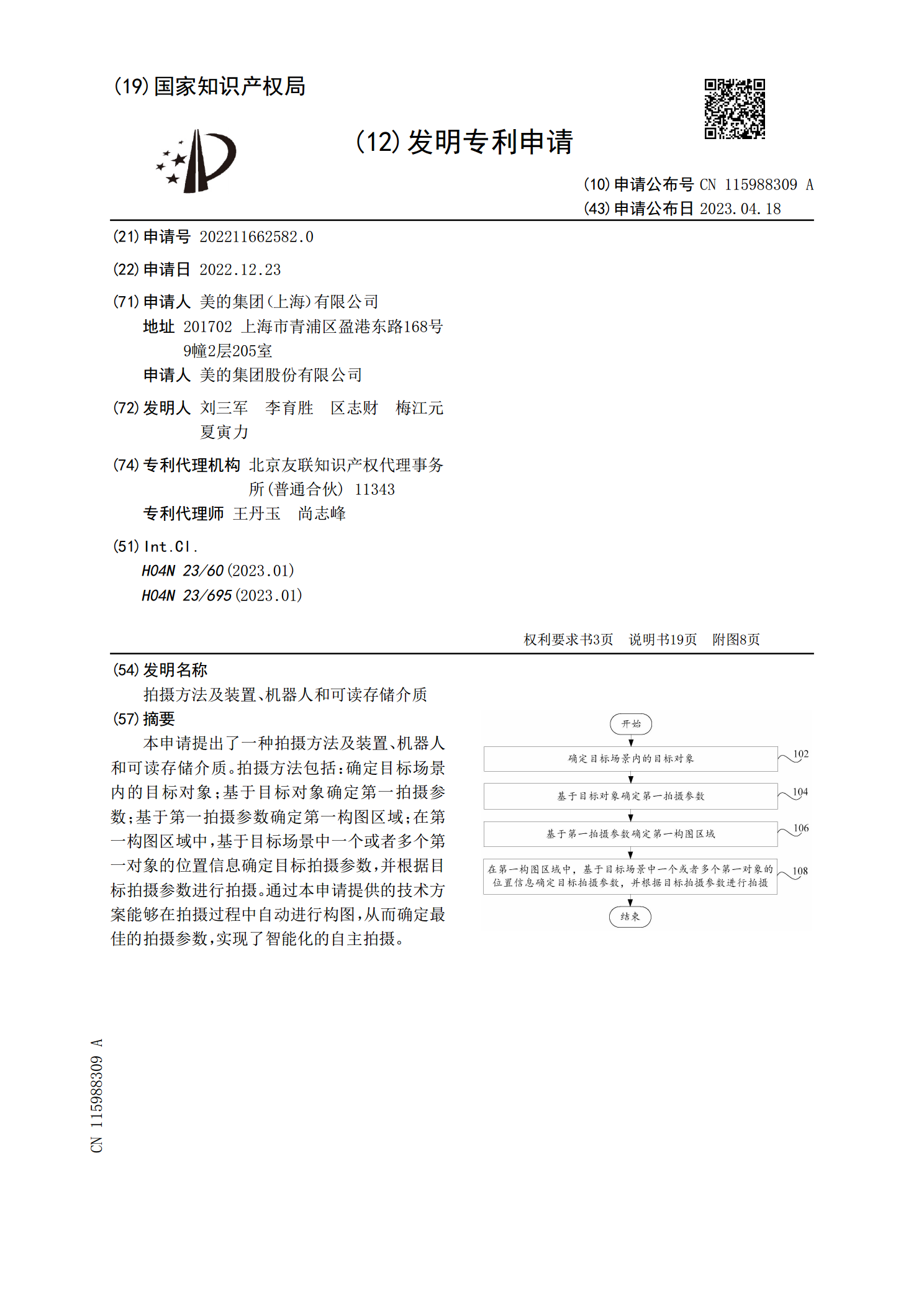
本申请提出了一种拍摄方法及装置、机器人和可读存储介质。拍摄方法包括:确定目标场景内的目标对象;基于目标对象确定第一拍摄参数;基于第一拍摄参数确定第一构图区域;在第一构图区域中,基于目标场景中一个或者多个第一对象的位置信息确定目标拍摄参数,并根据目标拍摄参数进行拍摄。通过本申请提供的技术方案能够在拍摄过程中自动进行构图,从而确定最佳的拍摄参数,实现了智能化的自主拍摄。

充电座的定位方法、装置、机器人和存储介质.pdf
本发明涉及一种充电座的定位方法、装置、机器人和存储介质。该方法包括:根据机器人的工作区域的环境地图和红外线广角信号的探测范围,规划机器人在所述工作区域内的搜索路径;沿所述搜索路径检测充电座发出的所述红外线广角信号,并在检测到所述红外线广角信号时执行搜索识别区域动作;在到达雷达识别区域时,扫描充电座携带的识别信息获取所述充电座的位姿信息;根据所述充电座的位姿信息,移动至所述充电座的位置。本发明提供的充电座的定位方法的定位精度较高,且减少了机器人出现冲撞充电座的现象。

机器人定位方法、装置、设备及可读存储介质.pdf
本发明公开了一种机器人定位方法、装置、设备以及计算机可读存储介质,该方法包括预先获得栅格化的点云地图中并根据每个栅格的栅格中心和最近目标点之间的距离确定栅格的梯度值;根据坐标值、栅格的梯度值,利用ICP算法以待配准点云中每个待配准点所在栅格对应的最近目标点为待配准点的配准点,将待配准点云和点云地图中目标点云进行配准,获得待配准点云配准到点云地图中的目标点云的位置转换关系;根据位置转换关系和粗略坐标值,确定机器人在点云地图中的精准坐标值。本申请中预先确点云地图中各个栅格的最近目标点和梯度值,以作为待配准点配

机器人的控制方法、控制装置、机器人和可读存储介质.pdf
本发明提出了一种机器人的控制方法、控制装置、机器人和可读存储介质。其中,机器人的控制方法包括接收手势控制指令;根据手势控制指令控制机器人行驶至第一目标区域;在机器人位于第一目标区域内的情况下,采集第一图像,第一图像为机器人所处环境的环境图像;根据第一图像确定第二目标区域;控制机器人在第二目标区域内运行。本发明实现了用户手势指令带有的位置信息进行精准定位,保证扫地机器人能够对用户期望的清扫区域的污渍、灰尘和/或垃圾等进行清扫,在用户手势控制指令所指的位置不够准确的情况下,能够对清扫位置校准,提高了扫地机器人