
自动驾驶系统及自动驾驶方法.pdf

飞舟****文章


1/10

2/10
3/10
4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动驾驶系统及自动驾驶方法.pdf
提供能够当车辆停靠位的乘降用区域没有空闲空间时不妨碍车辆、行人通行而自动驾驶车辆进行PUDO动作的技术。自动驾驶系统具备控制装置。控制装置进行提供无人驾驶接送服务的自动驾驶车辆的行驶控制处理。行驶控制处理包含车辆停靠位控制处理。车辆停靠位控制处理在用户的乘降地点为包含行驶用区域和乘降用区域在内的设施车辆停靠位的情况下进行。在车辆停靠位控制处理中,判定乘降用区域是否存在空闲空间。在判定为不存在空闲空间的情况下,判定是否预期为用户在车辆停靠位处快速乘降。在判定为预期快速乘降的情况下,将自动驾驶车辆进行乘降动作
车辆自动驾驶方法和车辆自动驾驶系统.pdf
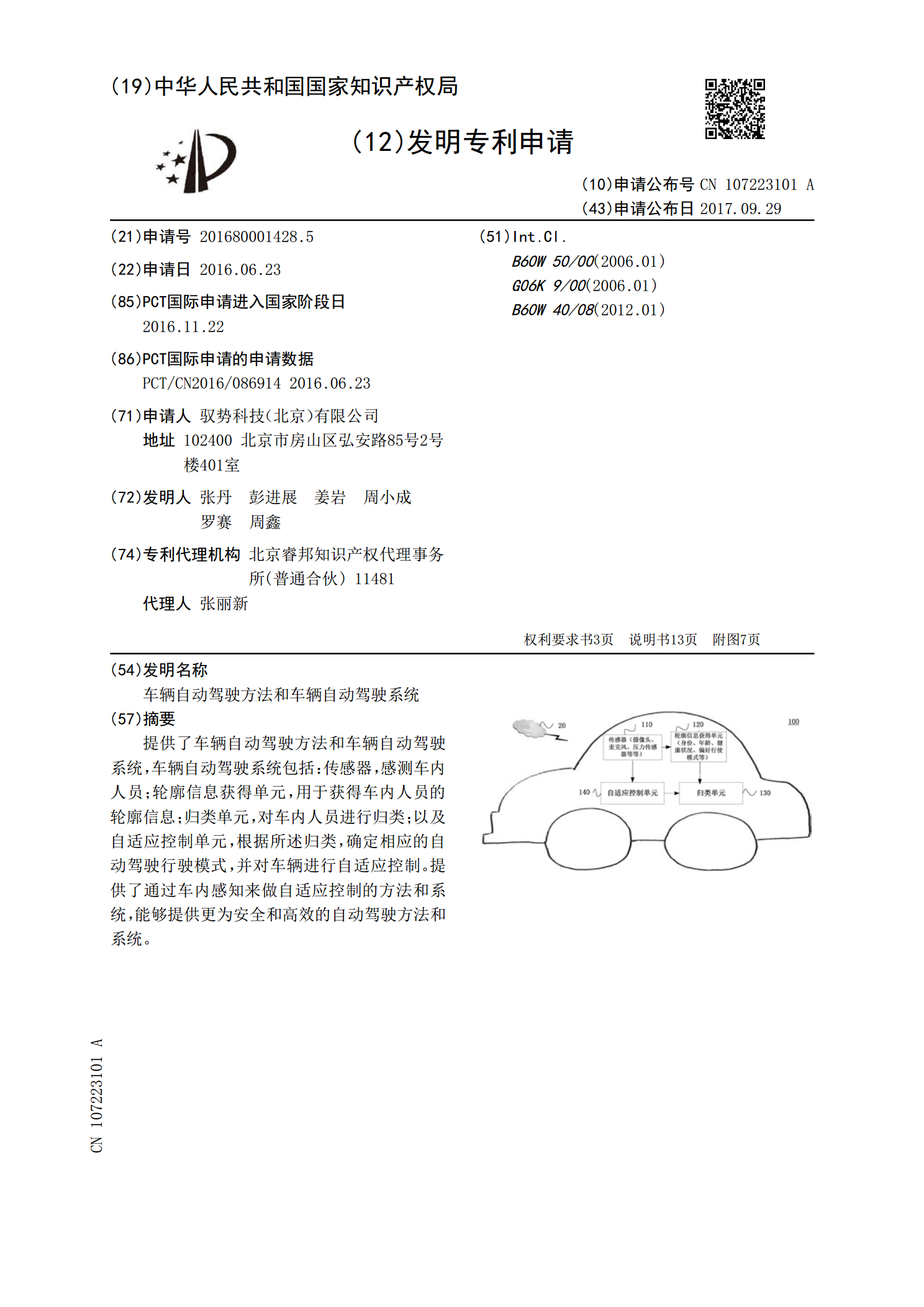
提供了车辆自动驾驶方法和车辆自动驾驶系统,车辆自动驾驶系统包括:传感器,感测车内人员;轮廓信息获得单元,用于获得车内人员的轮廓信息;归类单元,对车内人员进行归类;以及自适应控制单元,根据所述归类,确定相应的自动驾驶行驶模式,并对车辆进行自适应控制。提供了通过车内感知来做自适应控制的方法和系统,能够提供更为安全和高效的自动驾驶方法和系统。

自动驾驶控制装置、自动驾驶系统及自动驾驶农机.pdf
本申请提供一种自动驾驶控制装置、自动驾驶系统及自动驾驶农机。所述自动驾驶控制装置,包括:支座,支座的一侧凸出的设置有第一安装体;传动部,包括套体和滑动体,套体穿设在第一安装体上,套体的两端分别位于第一安装体的两侧,滑动体的两端分别伸出套体的两端,滑动体的第一端用于与待控制装置连接;直线驱动部,直线驱动部的驱动端设置有电磁铁,直线驱动部设置在第一安装体上;滑动配合部,包括滑轨和滑块,滑轨设置在支座上,滑块与直线驱动部的驱动端相对,滑块与滑动体的第二端连接;其中,直线驱动部能够驱动电磁铁向靠近或远离滑块的位置
车辆局部路径规划方法、自动驾驶系统和自动驾驶车辆.pdf
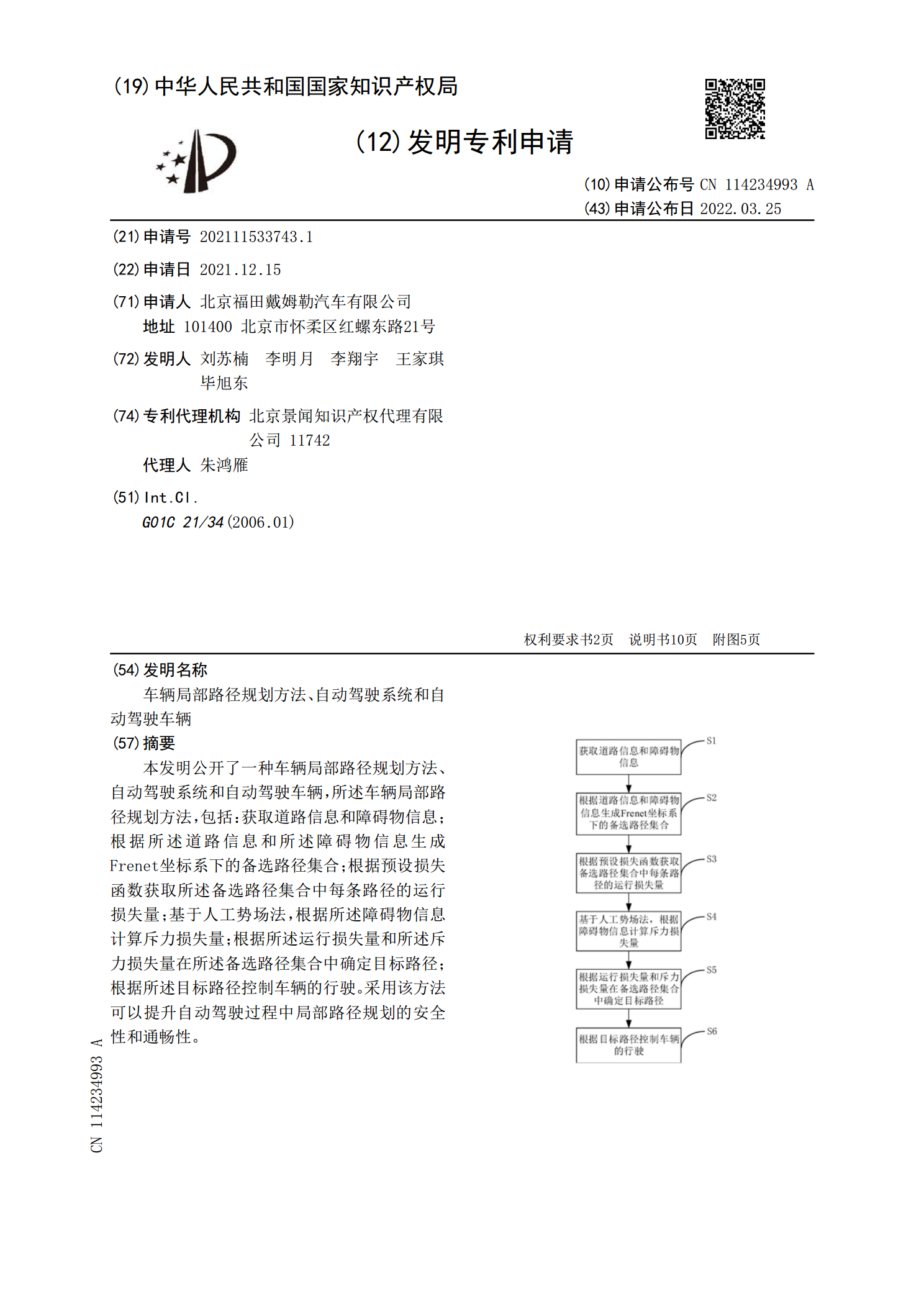
本发明公开了一种车辆局部路径规划方法、自动驾驶系统和自动驾驶车辆,所述车辆局部路径规划方法,包括:获取道路信息和障碍物信息;根据所述道路信息和所述障碍物信息生成Frenet坐标系下的备选路径集合;根据预设损失函数获取所述备选路径集合中每条路径的运行损失量;基于人工势场法,根据所述障碍物信息计算斥力损失量;根据所述运行损失量和所述斥力损失量在所述备选路径集合中确定目标路径;根据所述目标路径控制车辆的行驶。采用该方法可以提升自动驾驶过程中局部路径规划的安全性和通畅性。
列车自动驾驶方法和系统.pdf
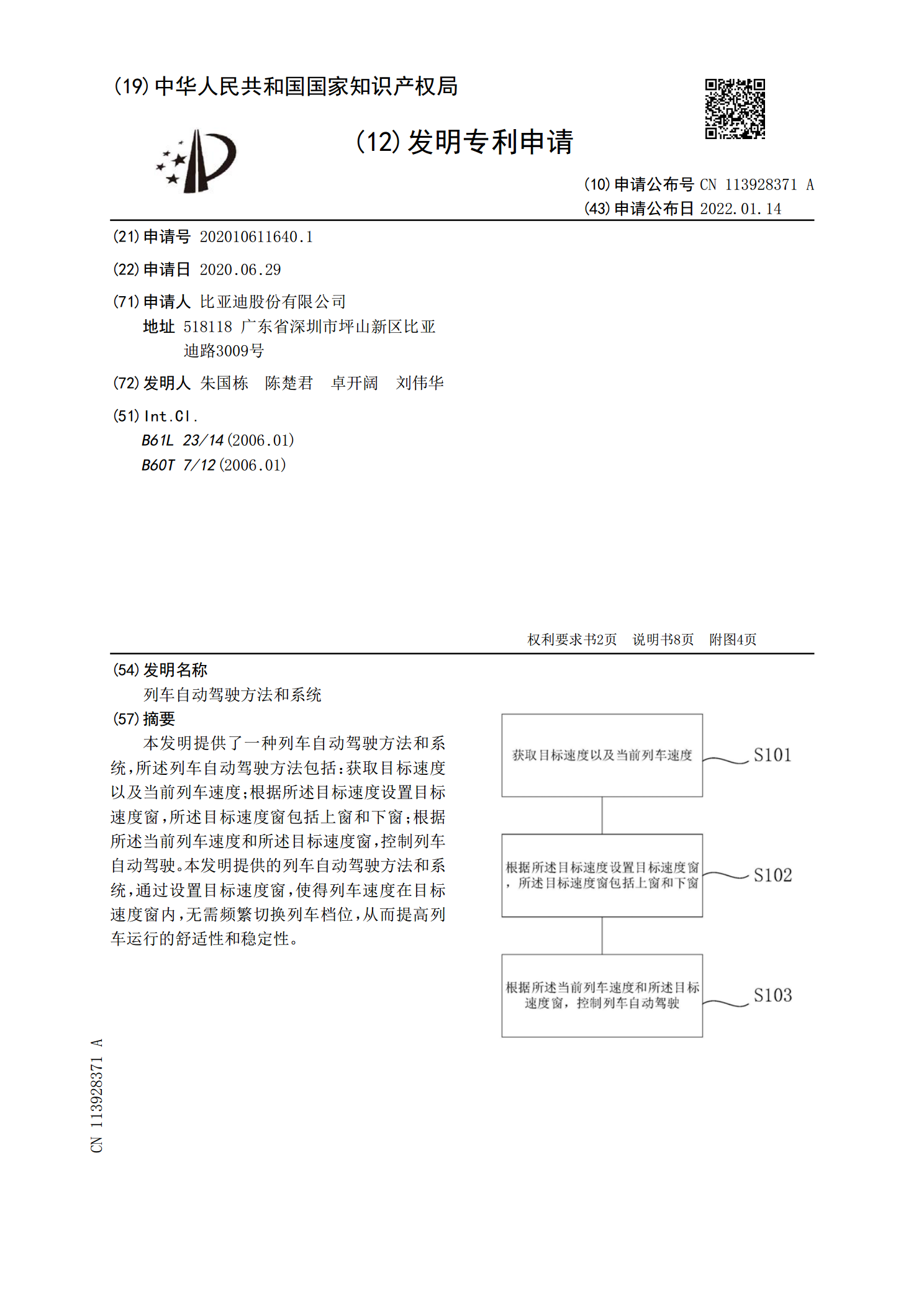
本发明提供了一种列车自动驾驶方法和系统,所述列车自动驾驶方法包括:获取目标速度以及当前列车速度;根据所述目标速度设置目标速度窗,所述目标速度窗包括上窗和下窗;根据所述当前列车速度和所述目标速度窗,控制列车自动驾驶。本发明提供的列车自动驾驶方法和系统,通过设置目标速度窗,使得列车速度在目标速度窗内,无需频繁切换列车档位,从而提高列车运行的舒适性和稳定性。