
列车自动驾驶方法和系统.pdf

Ja****23

1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
列车自动驾驶方法和系统.pdf
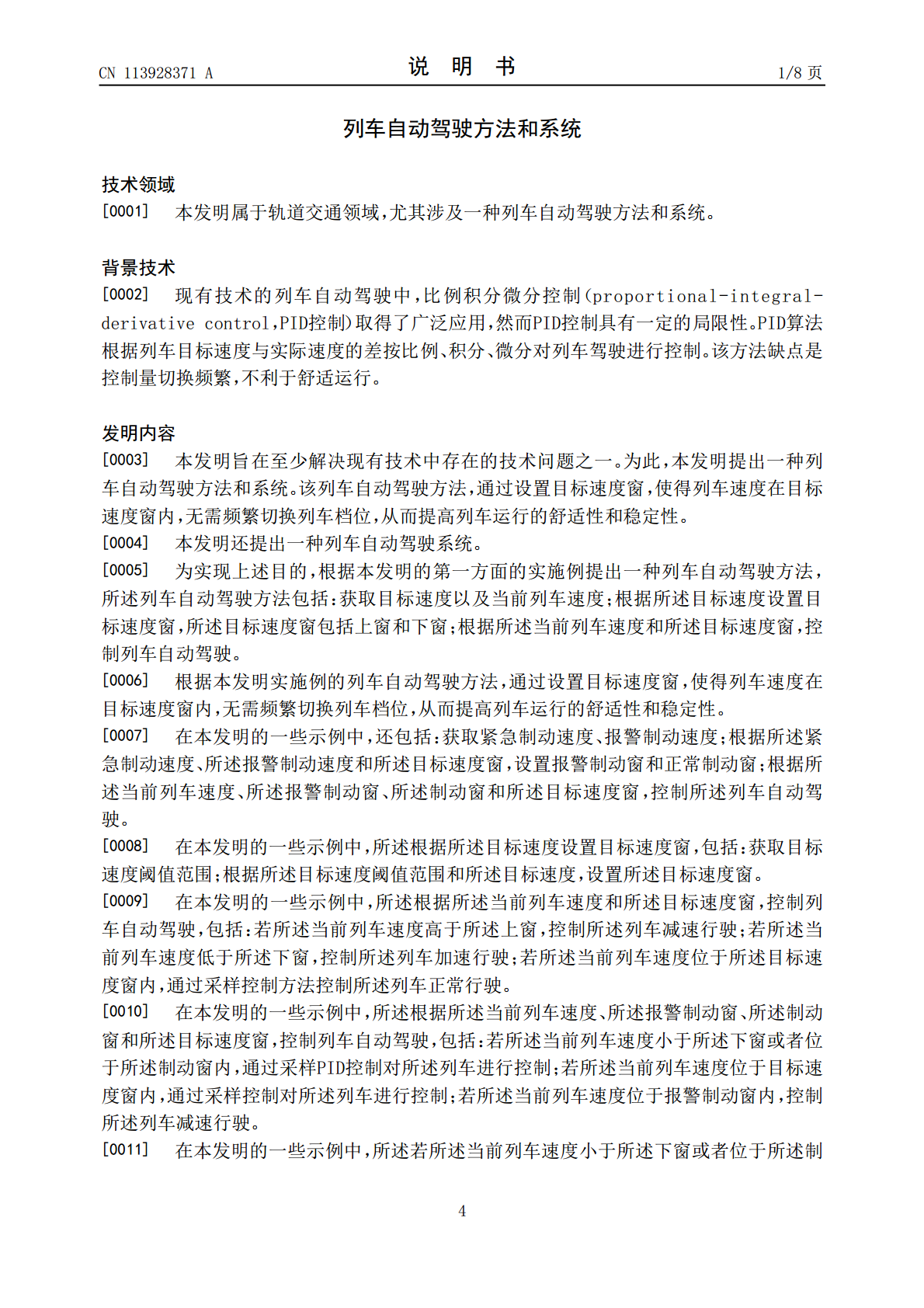
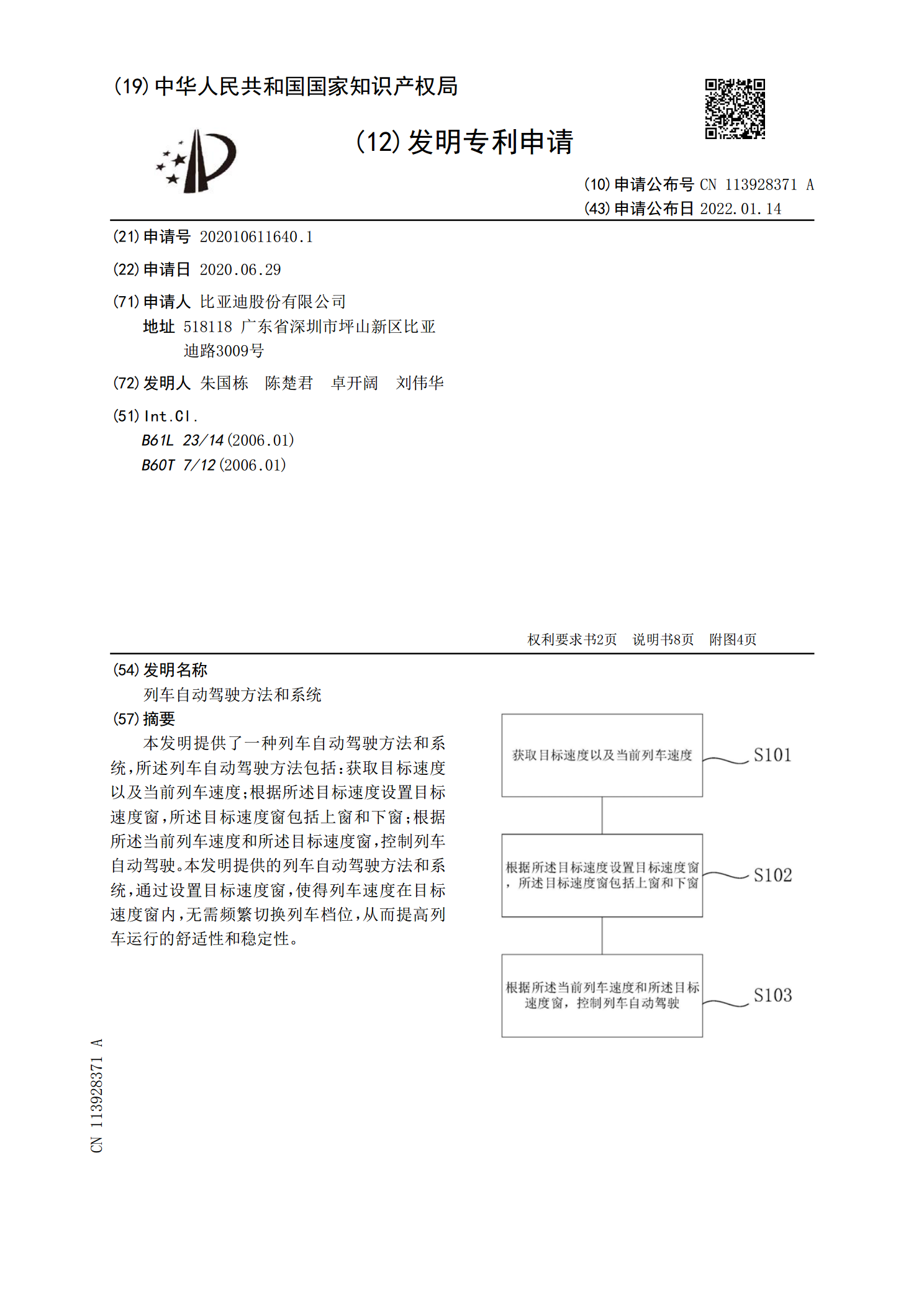
本发明提供了一种列车自动驾驶方法和系统,所述列车自动驾驶方法包括:获取目标速度以及当前列车速度;根据所述目标速度设置目标速度窗,所述目标速度窗包括上窗和下窗;根据所述当前列车速度和所述目标速度窗,控制列车自动驾驶。本发明提供的列车自动驾驶方法和系统,通过设置目标速度窗,使得列车速度在目标速度窗内,无需频繁切换列车档位,从而提高列车运行的舒适性和稳定性。

列车自动驾驶系统ATO测速方法及系统.pdf
本发明提供一种列车自动驾驶系统ATO测速方法及系统,所述方法包括:基于定时器接收到的至少一个脉冲信号,分别采集当前周期内第一脉冲信号的数量与所述当前周期内相邻脉冲信号的时间间隔,并获取已记录的上一周期内第二脉冲信号的数量;基于所述第一脉冲信号的数量、所述第二脉冲信号的数量和所述相邻脉冲信号的时间间隔,计算所述当前周期内列车的速度;记录所述当前周期内所述第一脉冲信号的数量。本发明能够实现对列车速度的测量,测速精度较高,保证ATO系统能够根据目标速度曲线控制列车安全高效的运行。

列车自动驾驶ATO系统.pptx
第6章列车自动驾驶(ATO)系统6.1ATO系统旳基本概念6.2ATO系统旳设备构成6.3ATO系统旳功能及其工作原理6.4ATO与ATP系统旳关系
车辆自动驾驶方法和车辆自动驾驶系统.pdf
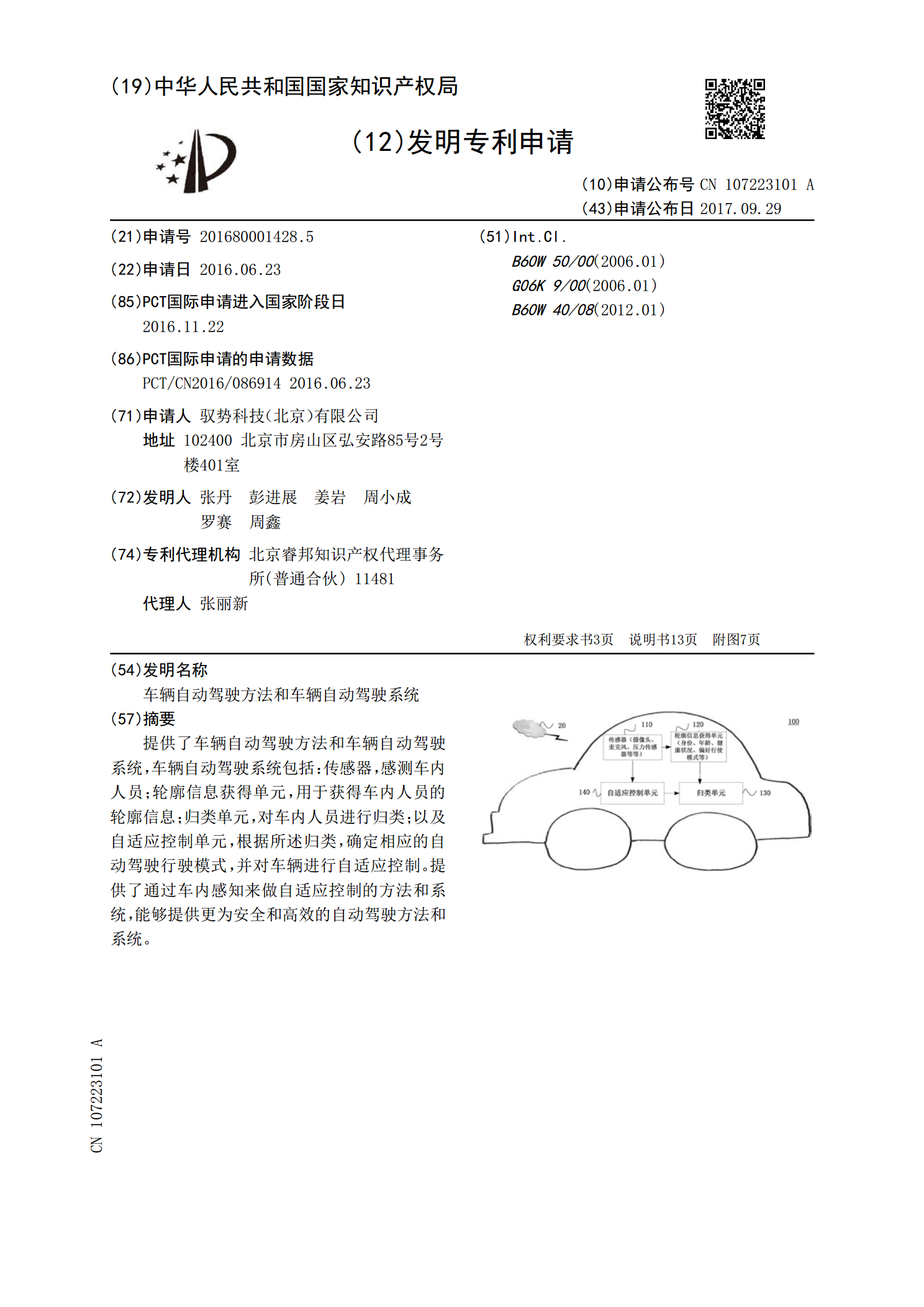
提供了车辆自动驾驶方法和车辆自动驾驶系统,车辆自动驾驶系统包括:传感器,感测车内人员;轮廓信息获得单元,用于获得车内人员的轮廓信息;归类单元,对车内人员进行归类;以及自适应控制单元,根据所述归类,确定相应的自动驾驶行驶模式,并对车辆进行自适应控制。提供了通过车内感知来做自适应控制的方法和系统,能够提供更为安全和高效的自动驾驶方法和系统。

列车自动驾驶算法研究和仿真培训系统的实现的中期报告.docx
列车自动驾驶算法研究和仿真培训系统的实现的中期报告一、课题背景和研究意义随着信息技术和控制技术的发展,自动驾驶技术在交通运输领域的应用日益广泛。列车自动驾驶技术不仅可以提高列车运行的效率和安全性,还能减少人为因素的干扰,节约能源资源。因此,列车自动驾驶技术的研究具有重要的理论和实践意义。本课题旨在研究列车自动驾驶算法,开发具有仿真培训功能的系统,为列车自动驾驶技术的推广和应用提供支持和保障。二、研究进展情况1.理论研究本课题在前期进行了列车运行模型和列车自动驾驶算法的研究和分析。首先,建立了包括列车动力学