
一种基于神经网络的路径规划方法、装置、设备及介质.pdf

一吃****春晓


1/10

2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于神经网络的路径规划方法、装置、设备及介质.pdf
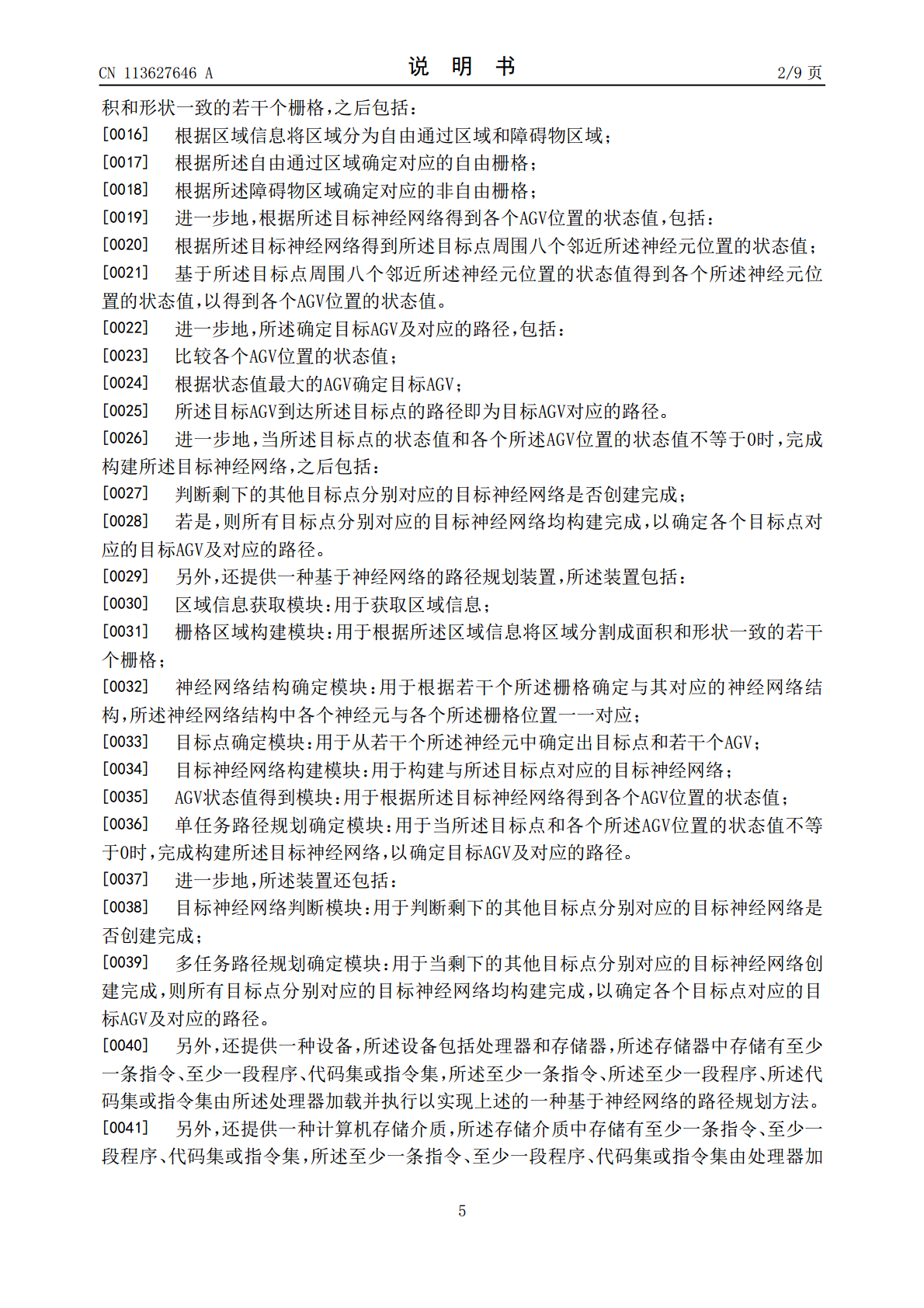
本发明涉及一种基于神经网络的路径规划方法、装置、设备及介质,所述方法包括:获取区域信息;根据所述区域信息将区域分割成面积和形状一致的若干个栅格;根据若干个所述栅格确定与其对应的神经网络结构,所述神经网络结构中各个神经元与各个所述栅格位置一一对应;从若干个所述神经元中确定出目标点和若干个AGV;构建与所述目标点对应的目标神经网络;根据所述目标神经网络得到各个AGV位置的状态值;当所述目标点和各个所述AGV位置的状态值不等于0时,完成构建所述目标神经网络,以确定目标AGV及对应的路径。通过改变构建神经网络的终
一种基于碳排放的路径规划方法、装置、设备及存储介质.pdf
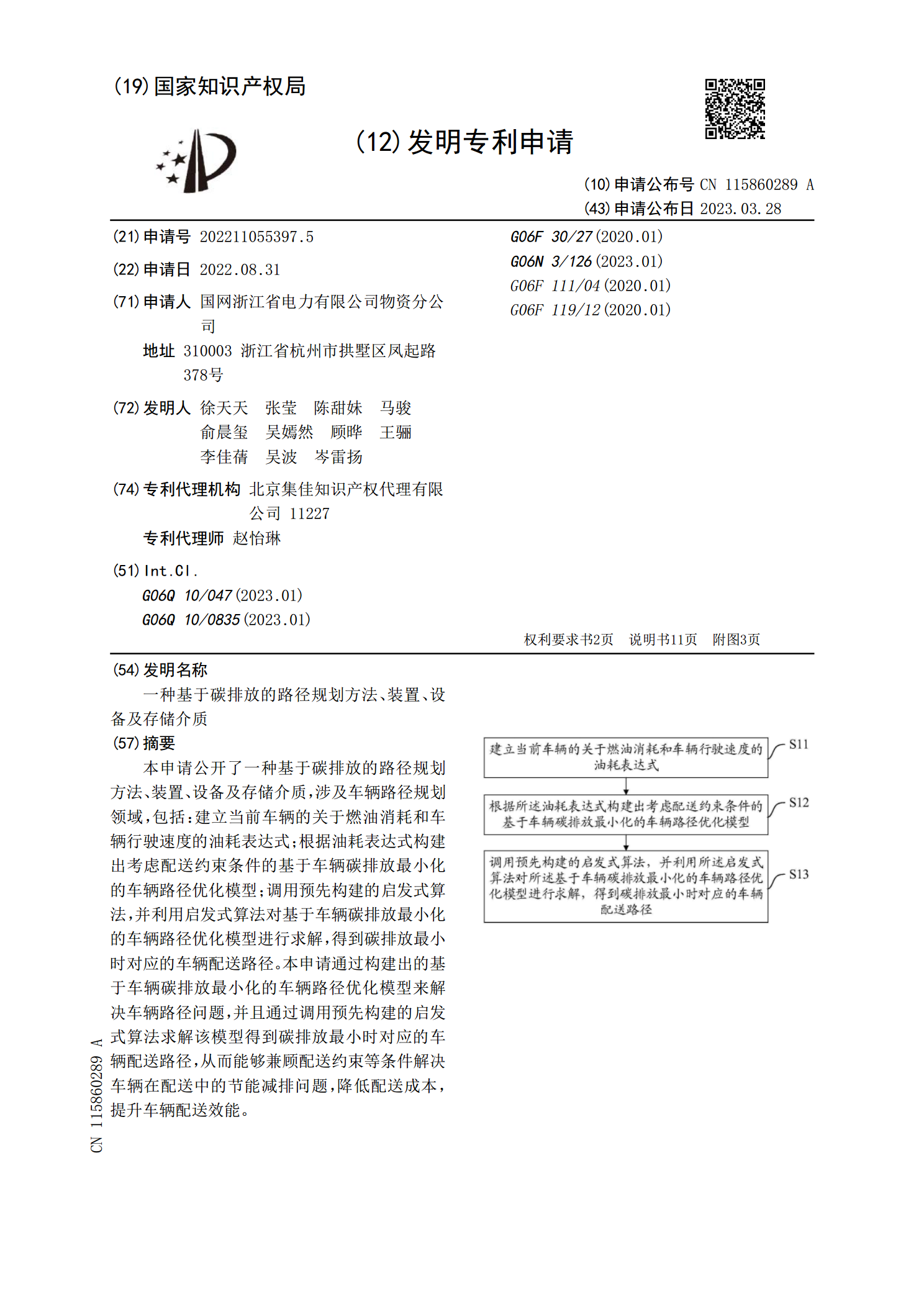
本申请公开了一种基于碳排放的路径规划方法、装置、设备及存储介质,涉及车辆路径规划领域,包括:建立当前车辆的关于燃油消耗和车辆行驶速度的油耗表达式;根据油耗表达式构建出考虑配送约束条件的基于车辆碳排放最小化的车辆路径优化模型;调用预先构建的启发式算法,并利用启发式算法对基于车辆碳排放最小化的车辆路径优化模型进行求解,得到碳排放最小时对应的车辆配送路径。本申请通过构建出的基于车辆碳排放最小化的车辆路径优化模型来解决车辆路径问题,并且通过调用预先构建的启发式算法求解该模型得到碳排放最小时对应的车辆配送路径,从而
一种路径规划方法、装置、设备及存储介质.pdf
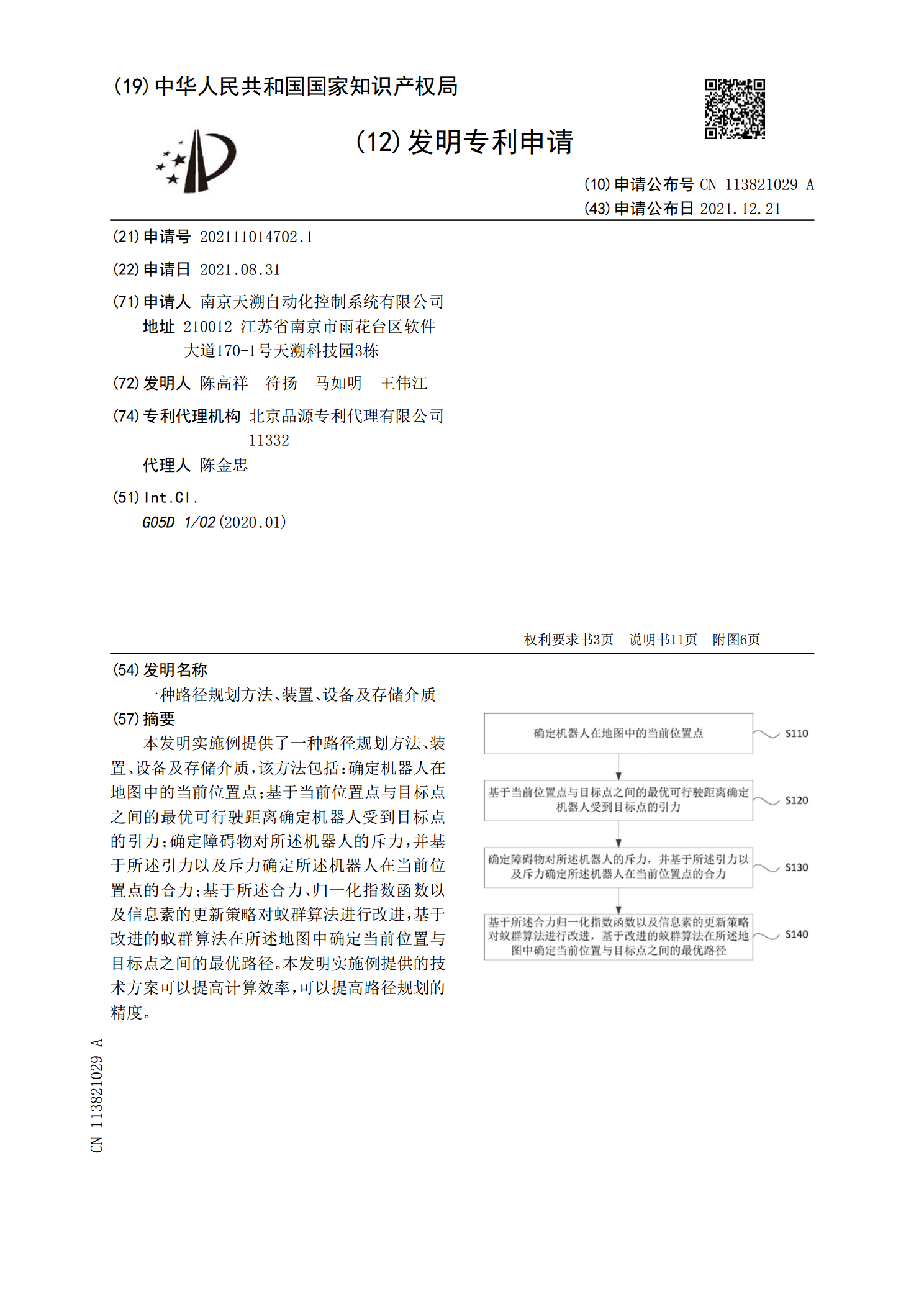
本发明实施例提供了一种路径规划方法、装置、设备及存储介质,该方法包括:确定机器人在地图中的当前位置点;基于当前位置点与目标点之间的最优可行驶距离确定机器人受到目标点的引力;确定障碍物对所述机器人的斥力,并基于所述引力以及斥力确定所述机器人在当前位置点的合力;基于所述合力、归一化指数函数以及信息素的更新策略对蚁群算法进行改进,基于改进的蚁群算法在所述地图中确定当前位置与目标点之间的最优路径。本发明实施例提供的技术方案可以提高计算效率,可以提高路径规划的精度。
一种路径规划方法、装置、设备和介质.pdf
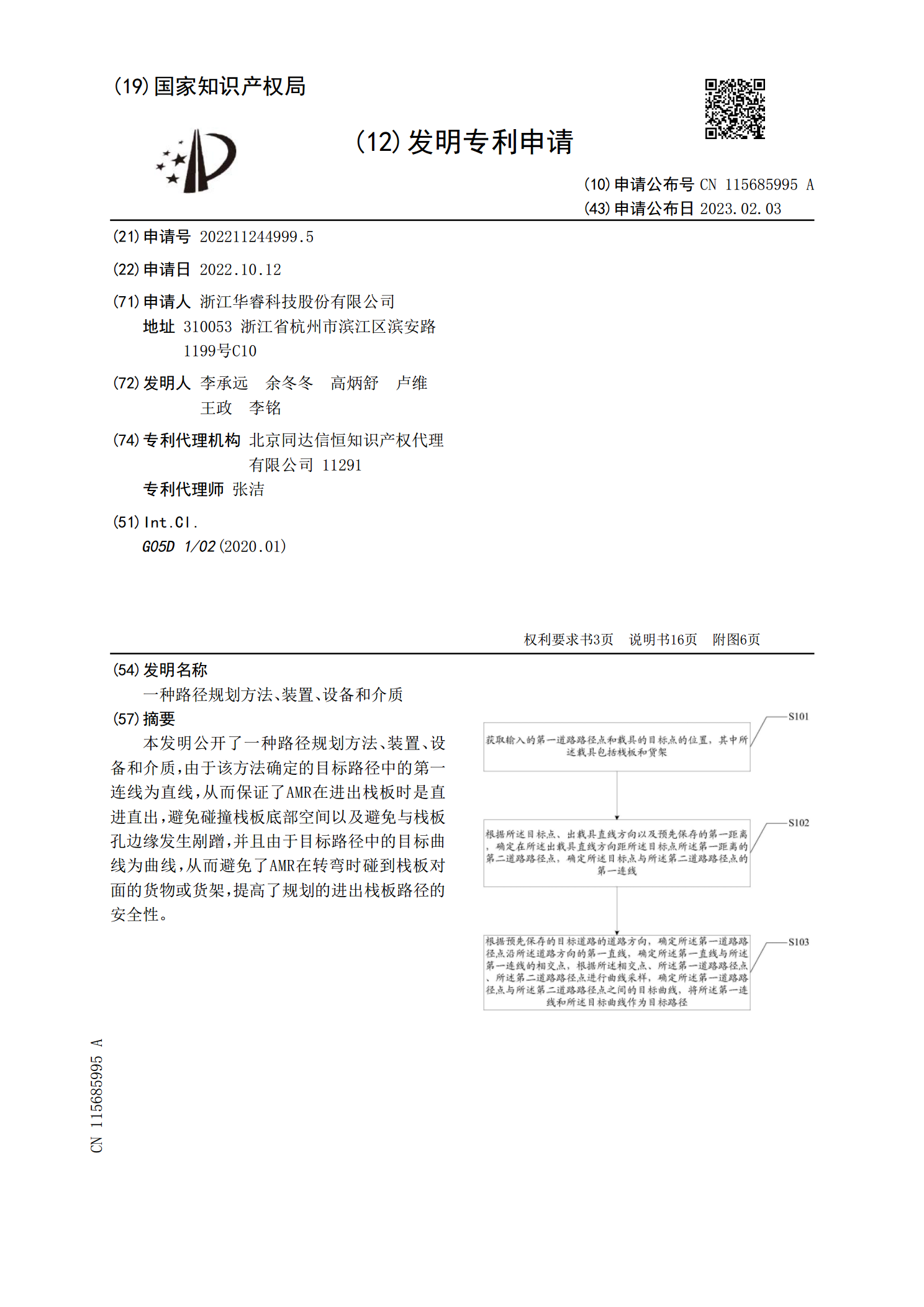
本发明公开了一种路径规划方法、装置、设备和介质,由于该方法确定的目标路径中的第一连线为直线,从而保证了AMR在进出栈板时是直进直出,避免碰撞栈板底部空间以及避免与栈板孔边缘发生剐蹭,并且由于目标路径中的目标曲线为曲线,从而避免了AMR在转弯时碰到栈板对面的货物或货架,提高了规划的进出栈板路径的安全性。

路径规划方法、装置、设备以及介质.pdf
本申请实施例提供了一种路径规划方法、装置、设备以及介质,该方法可以应用在电子地图的路径规划场景中,该方法包括:响应第一电子地图应用中的第一绘制操作,在第一电子地图应用的显示界面中,显示第一绘制操作所对应的目标图案;输出与目标图案相匹配的M个规划路径;M为正整数;响应针对M个规划路径的选取操作,在第一电子地图应用中基于选取操作所触发的目标规划路径进行路径导航。采用本申请实施例,可以丰富路径规划方式,增强电子地图在使用过程中的趣味性。