
地图定位方法、装置、计算机可读存储介质及终端设备.pdf

兴朝****45


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

地图定位方法、装置、计算机可读存储介质及终端设备.pdf
本申请属于定位技术领域,尤其涉及一种地图定位方法、装置、计算机可读存储介质及终端设备。所述方法包括:通过摄像装置获取目标运动装置在地图上行进的全局图像;在全局图像中对地图的标识码进行检测,并根据地图的标识码检测结果确定摄像装置距离地图的高度;在全局图像中确定地图的轮廓的角点位置,并根据角点位置和预设的实际地图尺寸确定全局图像的比例尺;在全局图像中对目标运动装置的标识码进行检测,并根据目标运动装置的标识码检测结果确定目标运动装置的标识码中心点;根据目标运动装置的标识码中心点、地图的轮廓的角点位置、摄像装置距

即时定位与地图构建方法、装置、终端设备及存储介质.pdf
本申请提供了一种即时定位与地图构建方法、装置、终端设备及存储介质。包括:将用户主动选取的图像帧作为最新关键帧加入关键帧序列;采用包含基于网格的运动统计算法与其他图像匹配算法的图像匹配策略,对最新关键帧与参考关键帧进行特征匹配,得到最新关键帧对应的特征匹配结果;根据最新关键帧对应的特征匹配结果生成环境地图及运动轨迹。用户能够主动选择确定最新关键帧,使得确定出的关键帧更具有代表性,提升后续依赖关键帧进行的定位和建图的精度,还能采用包含基于网格的运动统计算法和其他图像匹配算法的图像匹配策略对最新关键帧进行匹配,
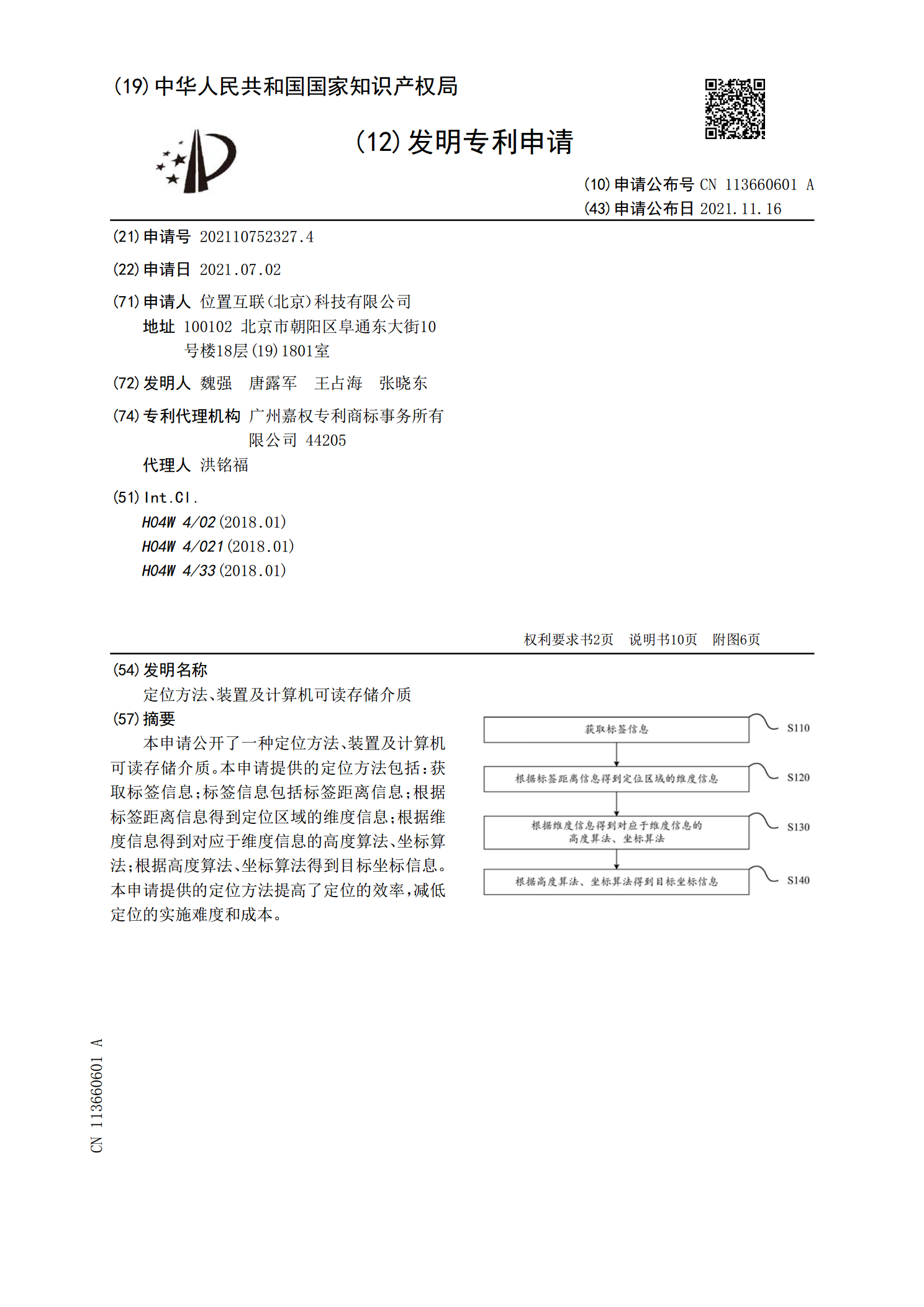
定位方法、装置及计算机可读存储介质.pdf
本申请公开了一种定位方法、装置及计算机可读存储介质。本申请提供的定位方法包括:获取标签信息;标签信息包括标签距离信息;根据标签距离信息得到定位区域的维度信息;根据维度信息得到对应于维度信息的高度算法、坐标算法;根据高度算法、坐标算法得到目标坐标信息。本申请提供的定位方法提高了定位的效率,减低定位的实施难度和成本。

地图流畅渲染方法、终端设备及计算机可读存储介质.pdf
本发明公开了一种地图流畅渲染方法、终端设备及计算机可读存储介质,该方法包括:创建多个线程;在所述多个线程中选择可使用的线程,通过该可使用的线程发送来自浏览器主线程的数据请求;根据所述数据请求加载对应的所有数据并缓存;将所述数据请求对应的缓存数据以预定的长度进行分块得到分块数据;将所述分块数据通过可使用的线程推送到所述浏览器主线程以使所述浏览器主线程根据所述分块数据对地图进行渲染。本发明可以多任务并发执行,数据请求和地图交互及数据分块均可同时进行处理,提高执行速度、不阻塞浏览器主线程,提升流畅度,有效控制数
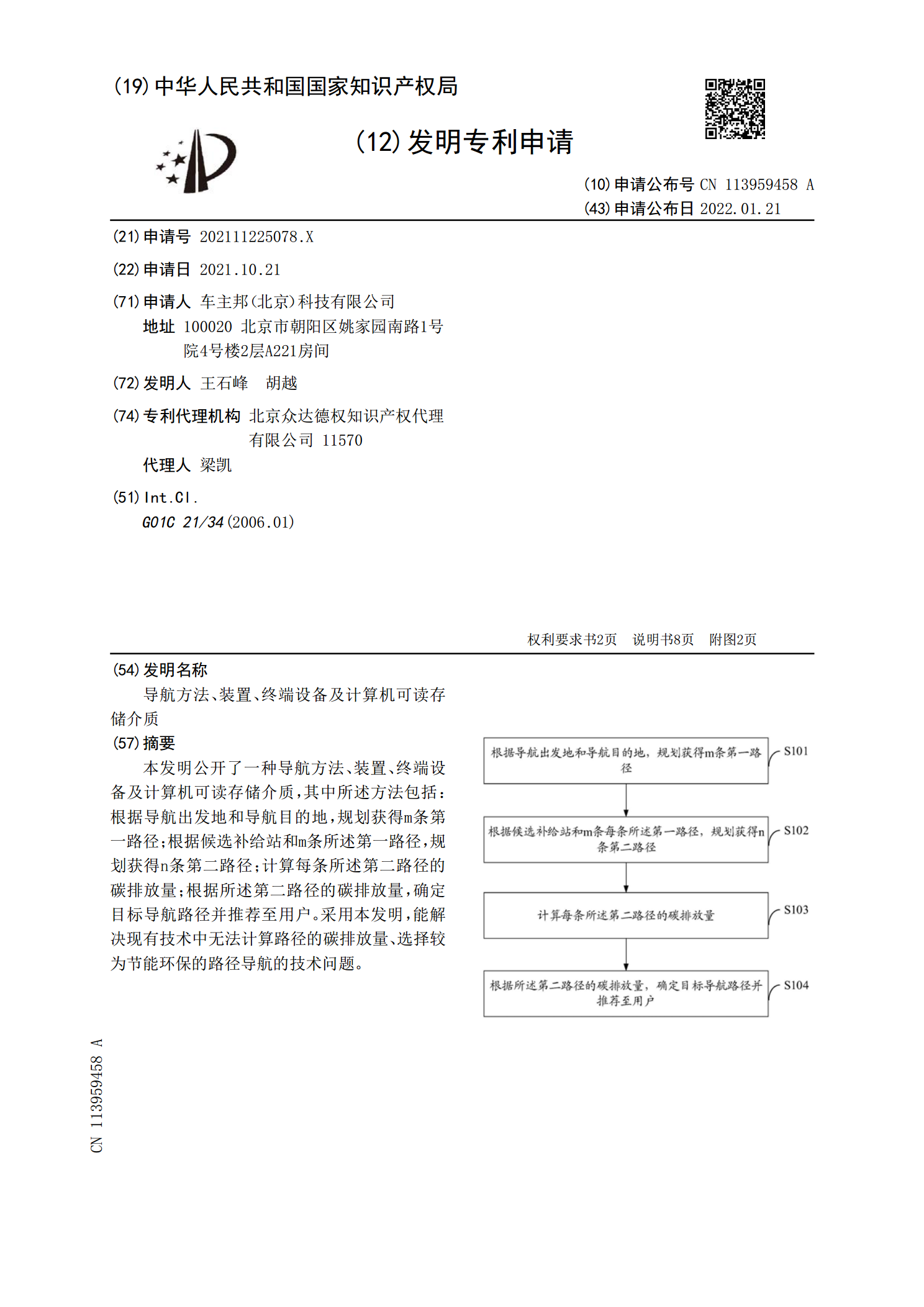
导航方法、装置、终端设备及计算机可读存储介质.pdf
本发明公开了一种导航方法、装置、终端设备及计算机可读存储介质,其中所述方法包括:根据导航出发地和导航目的地,规划获得m条第一路径;根据候选补给站和m条所述第一路径,规划获得n条第二路径;计算每条所述第二路径的碳排放量;根据所述第二路径的碳排放量,确定目标导航路径并推荐至用户。采用本发明,能解决现有技术中无法计算路径的碳排放量、选择较为节能环保的路径导航的技术问题。