
一种全液压转向控制系统、方法、车辆和存储介质.pdf

佳宁****么啦

1/10
2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种全液压转向控制系统、方法、车辆和存储介质.pdf
本申请涉及一种全液压转向控制系统、方法、车辆和存储介质。所述系统包括:应用于目标车辆,包括转向控制器、转角传感器、转向控制阀、转向轮缸、以及用于控制车轮转动角度的转向连杆机构,其中,转向控制器用于获取转角控制请求,并对转角控制请求进行解析,以确定各个转向轴所需达到的目标转角值;以及,用于获取经由转角传感器传输的各个转向轴对应达到的实际转角值,并基于目标转角值和实际转角值之间的大小关系,确定相应的转向控制模式;以及,用于按照转向控制模式,控制转向控制阀调整流入到转向轮缸中的液压油的流量,基于当前转向轮缸内同

全液压转向车辆和全液压转向车辆的转向方法.pdf
本发明公开一种全液压转向车辆和转向方法,全液压转向车辆包括左前轮、右前轮、左后轮、右后轮和转向系统,所述转向系统包括:液压锁止装置,与所述左前轮、右前轮、左后轮和右后轮连接,包括用于对所述左前轮和所述右前轮在回正位置进行锁止的第一中位锁止装置和用于对所述左后轮和所述右后轮在回正位置进行锁止的第二中位锁止装置;锁止液压阀组,与所述液压锁止装置连接,用于控制所述液压锁止装置对所述左前轮、右前轮、左后轮和右后轮在回正位置的锁止和解锁。
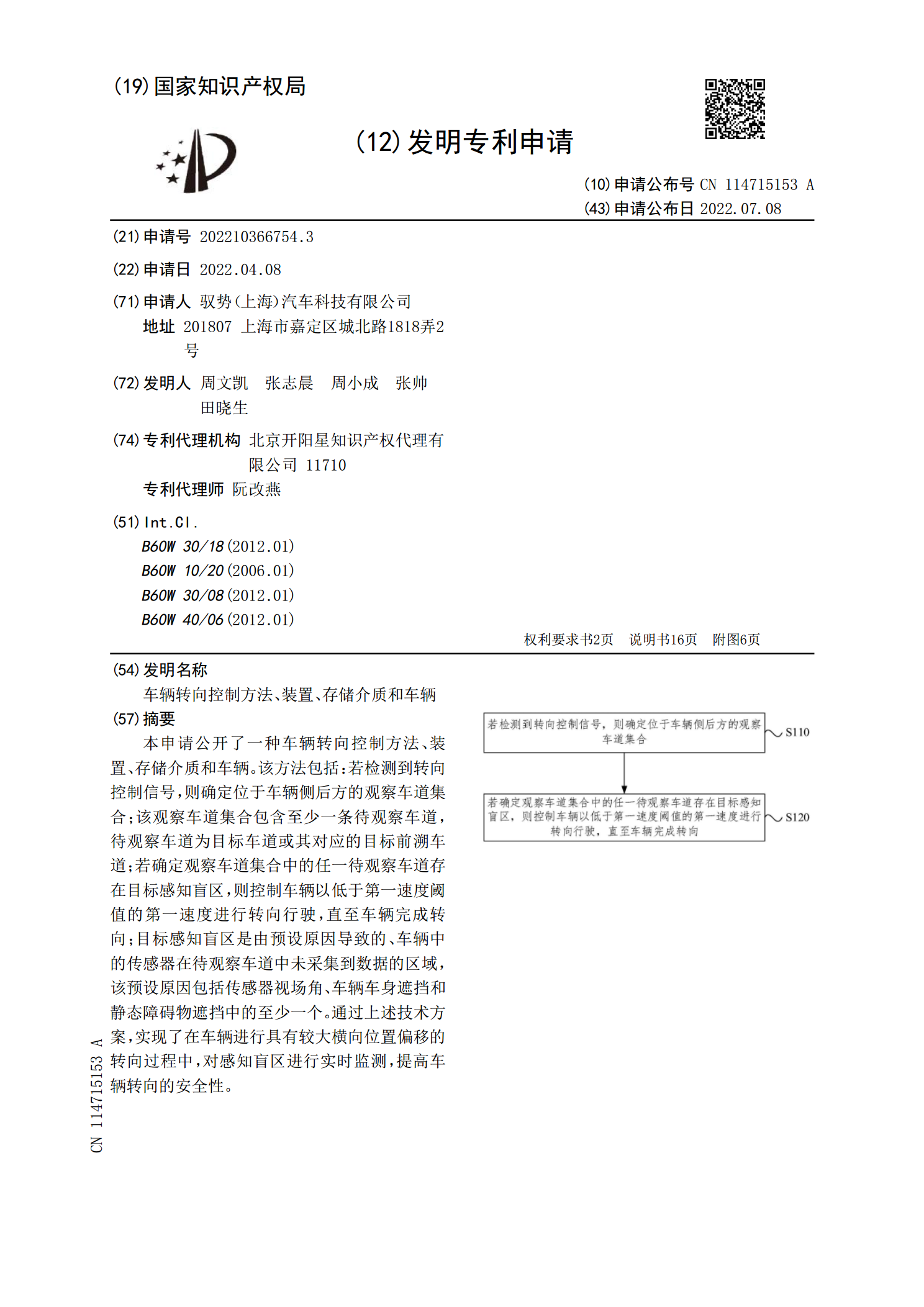
车辆转向控制方法、装置、存储介质和车辆.pdf
本申请公开了一种车辆转向控制方法、装置、存储介质和车辆。该方法包括:若检测到转向控制信号,则确定位于车辆侧后方的观察车道集合;该观察车道集合包含至少一条待观察车道,待观察车道为目标车道或其对应的目标前溯车道;若确定观察车道集合中的任一待观察车道存在目标感知盲区,则控制车辆以低于第一速度阈值的第一速度进行转向行驶,直至车辆完成转向;目标感知盲区是由预设原因导致的、车辆中的传感器在待观察车道中未采集到数据的区域,该预设原因包括传感器视场角、车辆车身遮挡和静态障碍物遮挡中的至少一个。通过上述技术方案,实现了在车
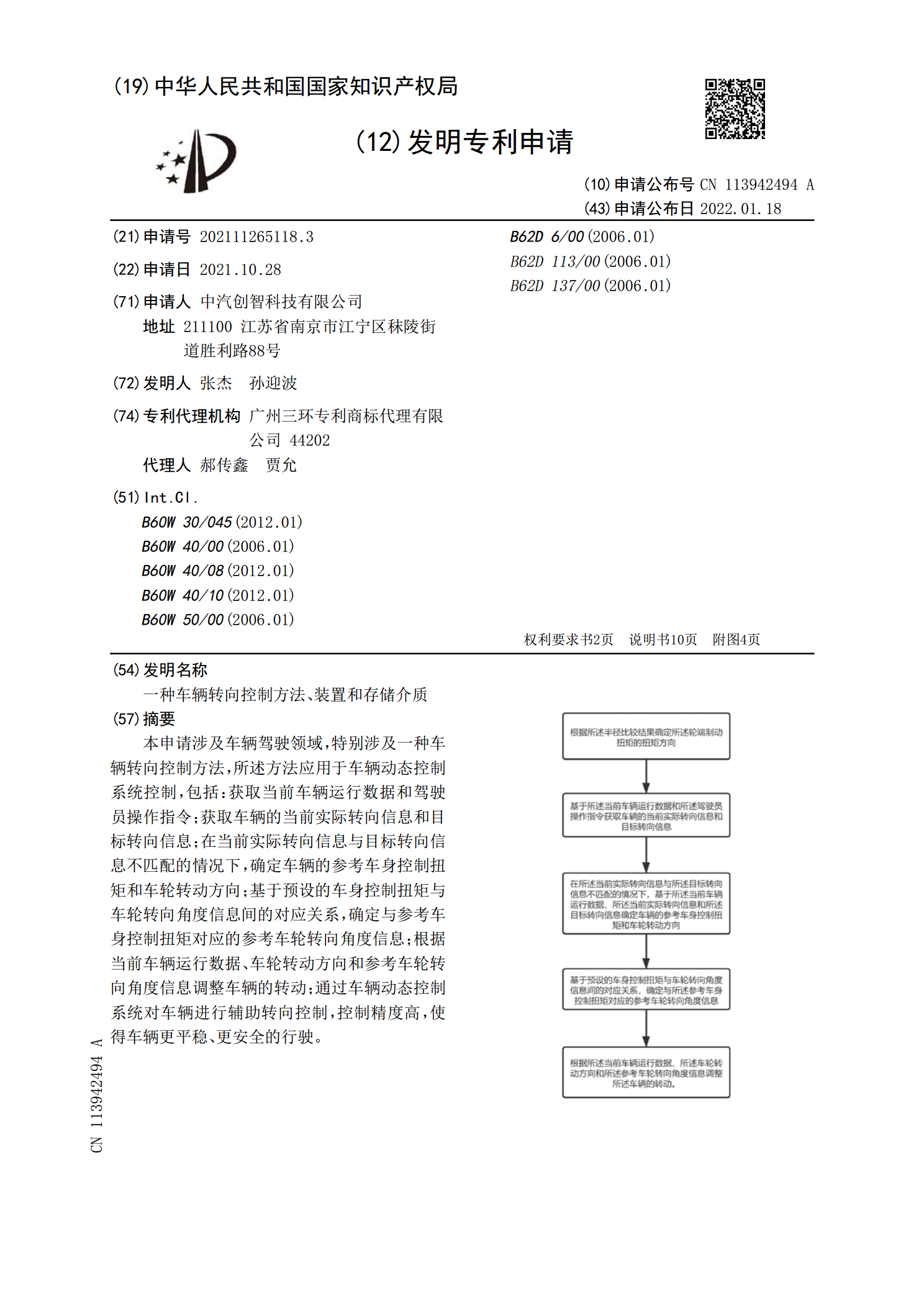
一种车辆转向控制方法、装置和存储介质.pdf
本申请涉及车辆驾驶领域,特别涉及一种车辆转向控制方法,所述方法应用于车辆动态控制系统控制,包括:获取当前车辆运行数据和驾驶员操作指令;获取车辆的当前实际转向信息和目标转向信息;在当前实际转向信息与目标转向信息不匹配的情况下,确定车辆的参考车身控制扭矩和车轮转动方向;基于预设的车身控制扭矩与车轮转向角度信息间的对应关系,确定与参考车身控制扭矩对应的参考车轮转向角度信息;根据当前车辆运行数据、车轮转动方向和参考车轮转向角度信息调整车辆的转动;通过车辆动态控制系统对车辆进行辅助转向控制,控制精度高,使得车辆更平
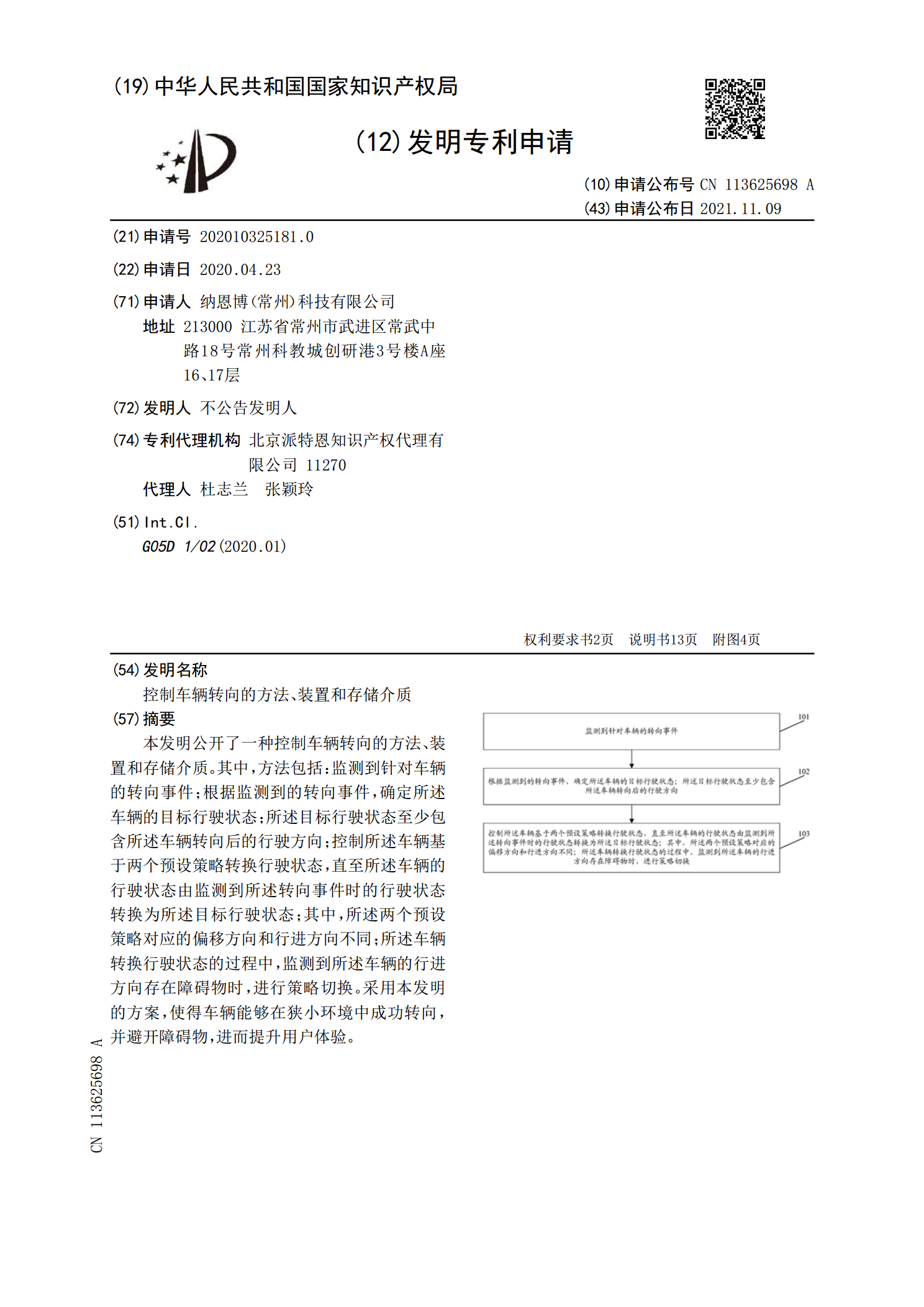
控制车辆转向的方法、装置和存储介质.pdf
本发明公开了一种控制车辆转向的方法、装置和存储介质。其中,方法包括:监测到针对车辆的转向事件;根据监测到的转向事件,确定所述车辆的目标行驶状态;所述目标行驶状态至少包含所述车辆转向后的行驶方向;控制所述车辆基于两个预设策略转换行驶状态,直至所述车辆的行驶状态由监测到所述转向事件时的行驶状态转换为所述目标行驶状态;其中,所述两个预设策略对应的偏移方向和行进方向不同;所述车辆转换行驶状态的过程中,监测到所述车辆的行进方向存在障碍物时,进行策略切换。采用本发明的方案,使得车辆能够在狭小环境中成功转向,并避开障碍