
光检测和测距感测装置.pdf

是笛****加盟

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
光检测和测距感测装置.pdf
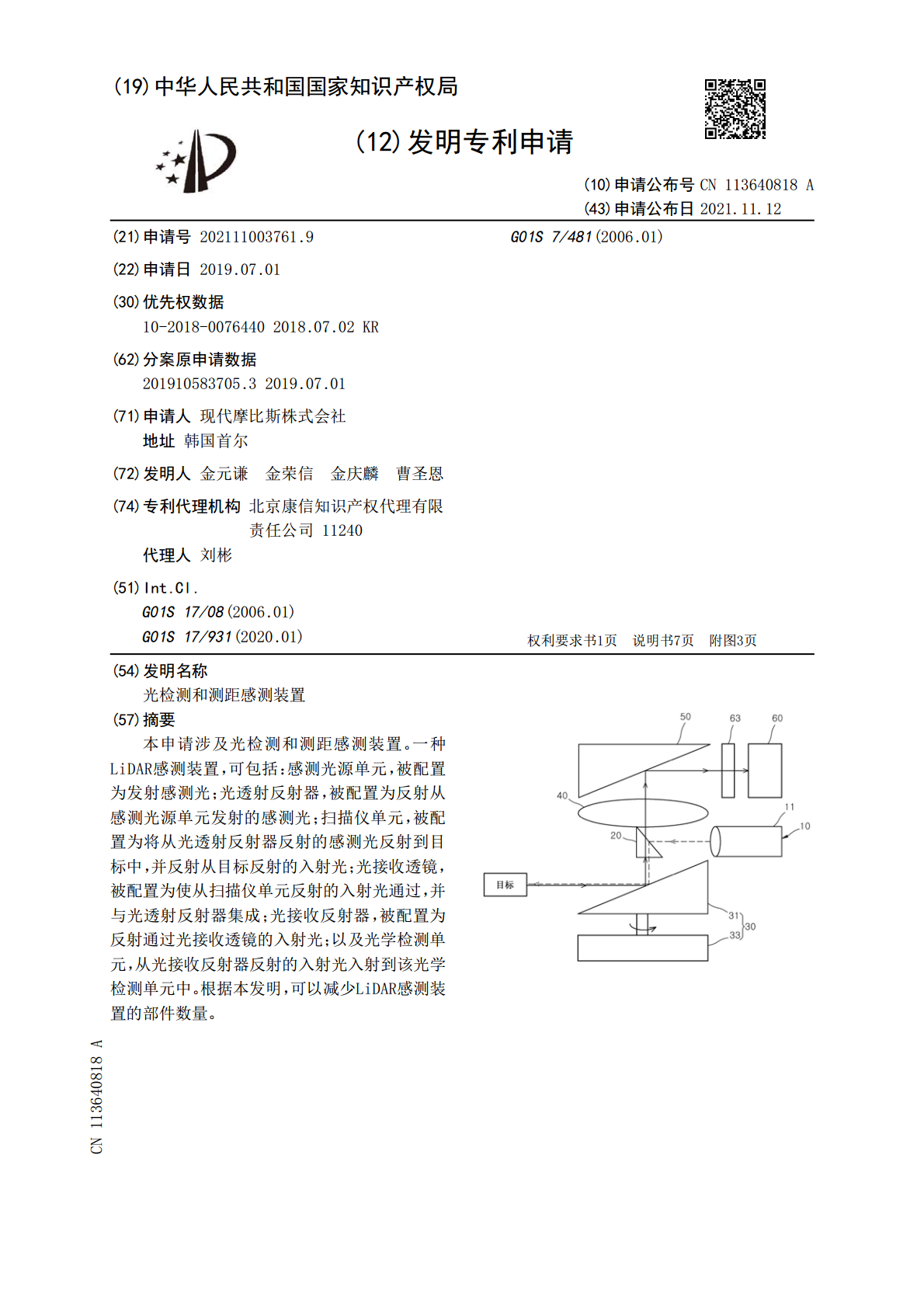
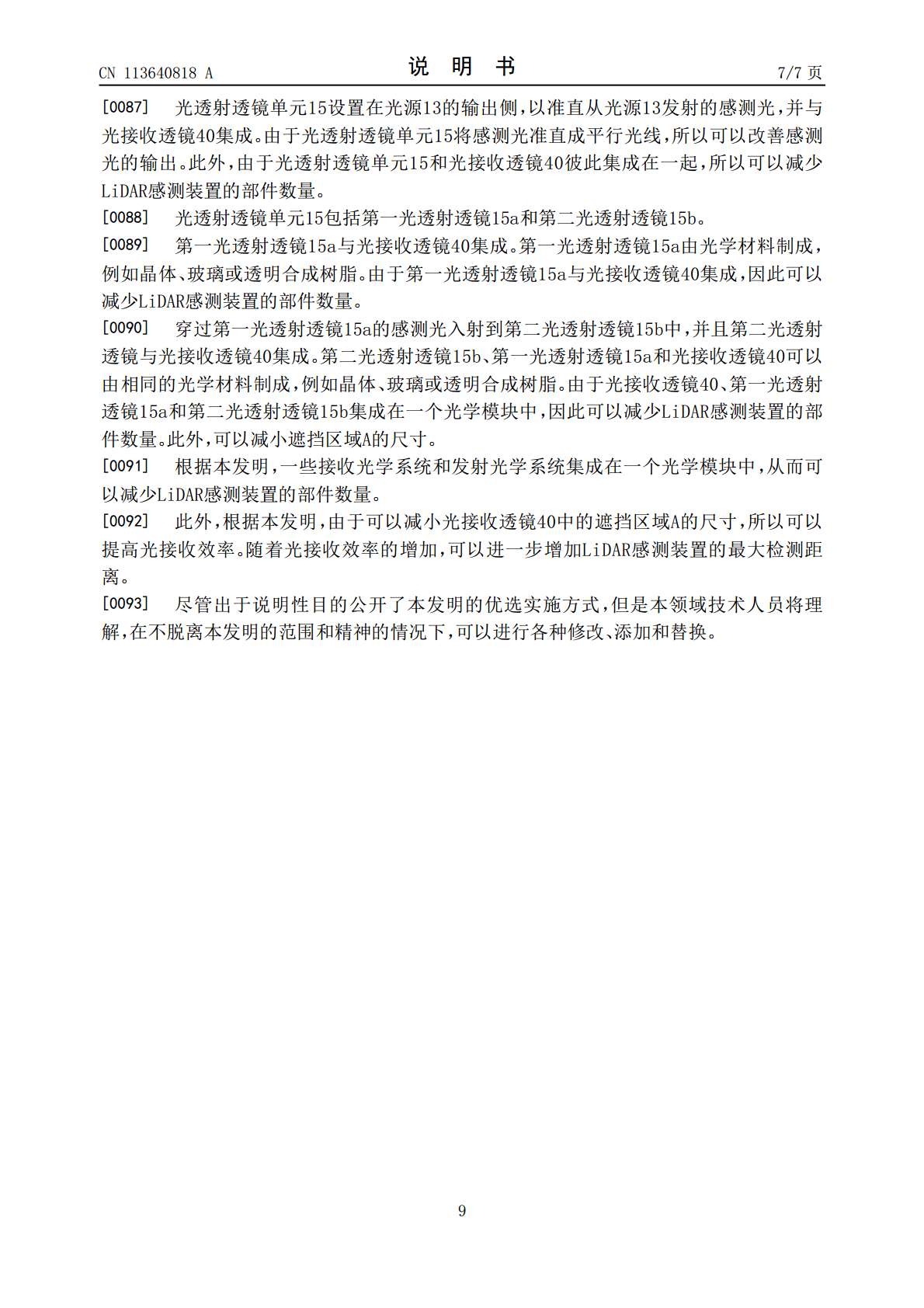
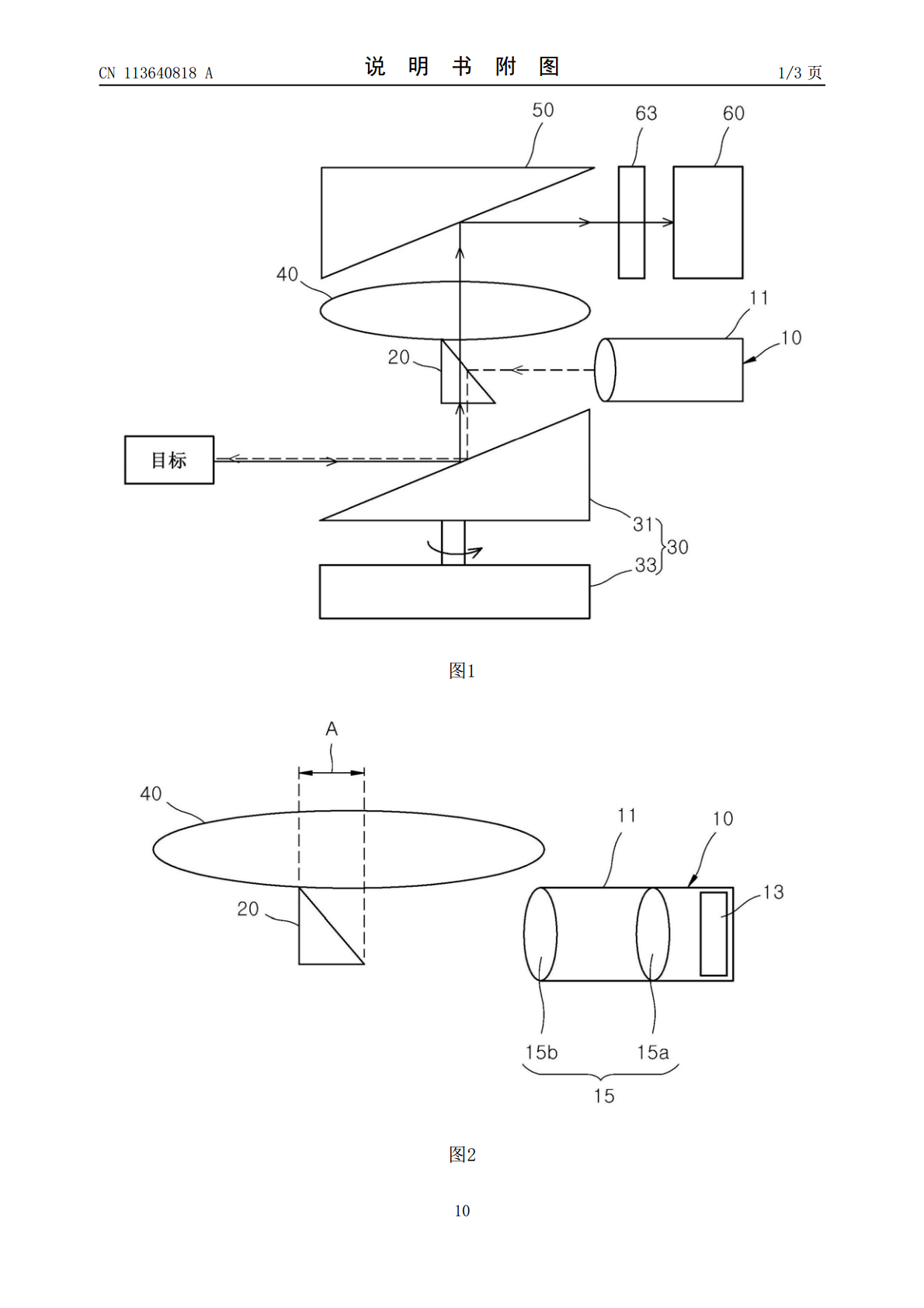
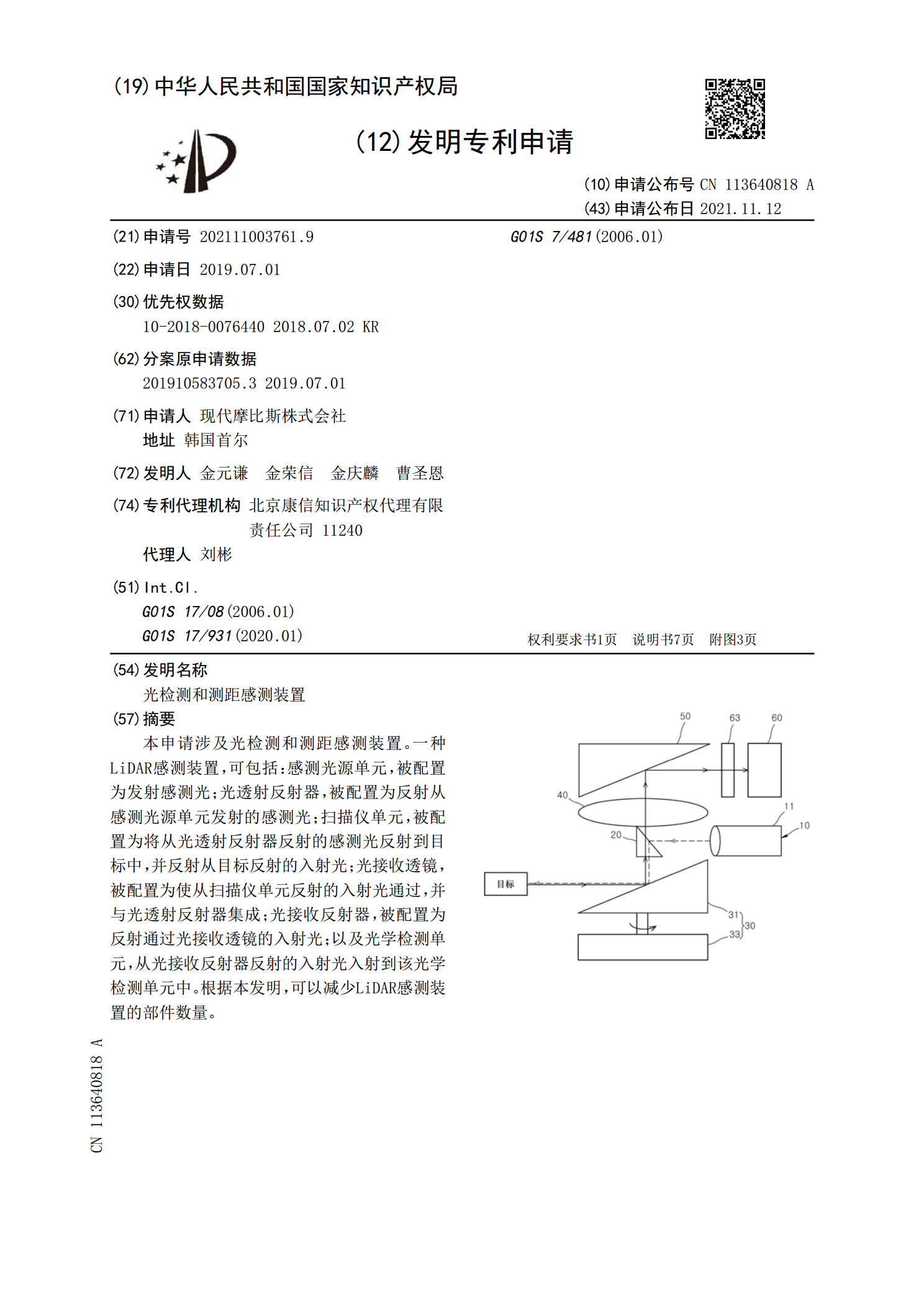
本申请涉及光检测和测距感测装置。一种LiDAR感测装置,可包括:感测光源单元,被配置为发射感测光;光透射反射器,被配置为反射从感测光源单元发射的感测光;扫描仪单元,被配置为将从光透射反射器反射的感测光反射到目标中,并反射从目标反射的入射光;光接收透镜,被配置为使从扫描仪单元反射的入射光通过,并与光透射反射器集成;光接收反射器,被配置为反射通过光接收透镜的入射光;以及光学检测单元,从光接收反射器反射的入射光入射到该光学检测单元中。根据本发明,可以减少LiDAR感测装置的部件数量。
脉冲光检测和测距装置、在脉冲光检测和测距系统中对物体进行检测和测距的系统和方法.pdf
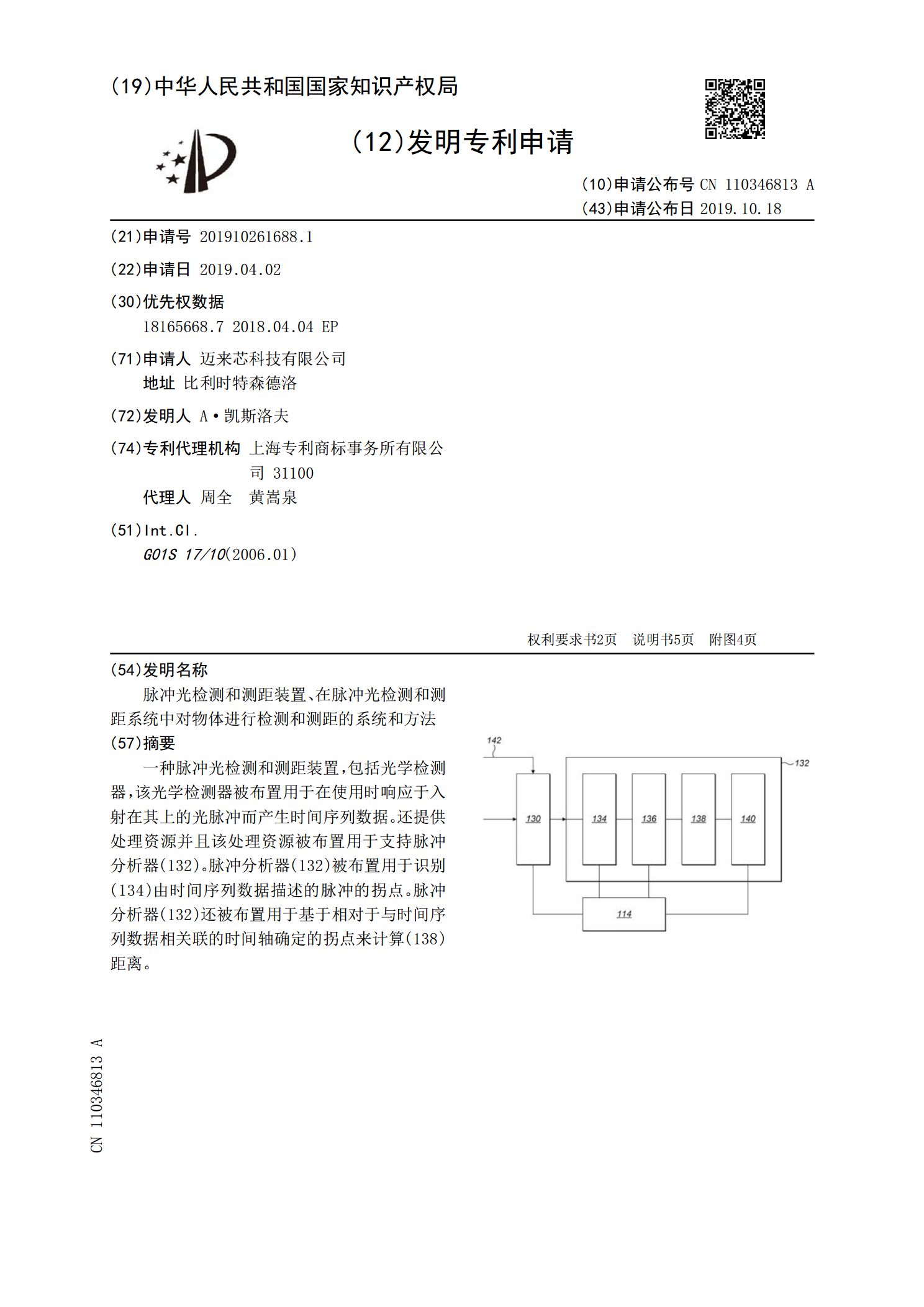
一种脉冲光检测和测距装置,包括光学检测器,该光学检测器被布置用于在使用时响应于入射在其上的光脉冲而产生时间序列数据。还提供处理资源并且该处理资源被布置用于支持脉冲分析器(132)。脉冲分析器(132)被布置用于识别(134)由时间序列数据描述的脉冲的拐点。脉冲分析器(132)还被布置用于基于相对于与时间序列数据相关联的时间轴确定的拐点来计算(138)距离。
具有多个光检测和测距装置(LIDAR)的车辆.pdf
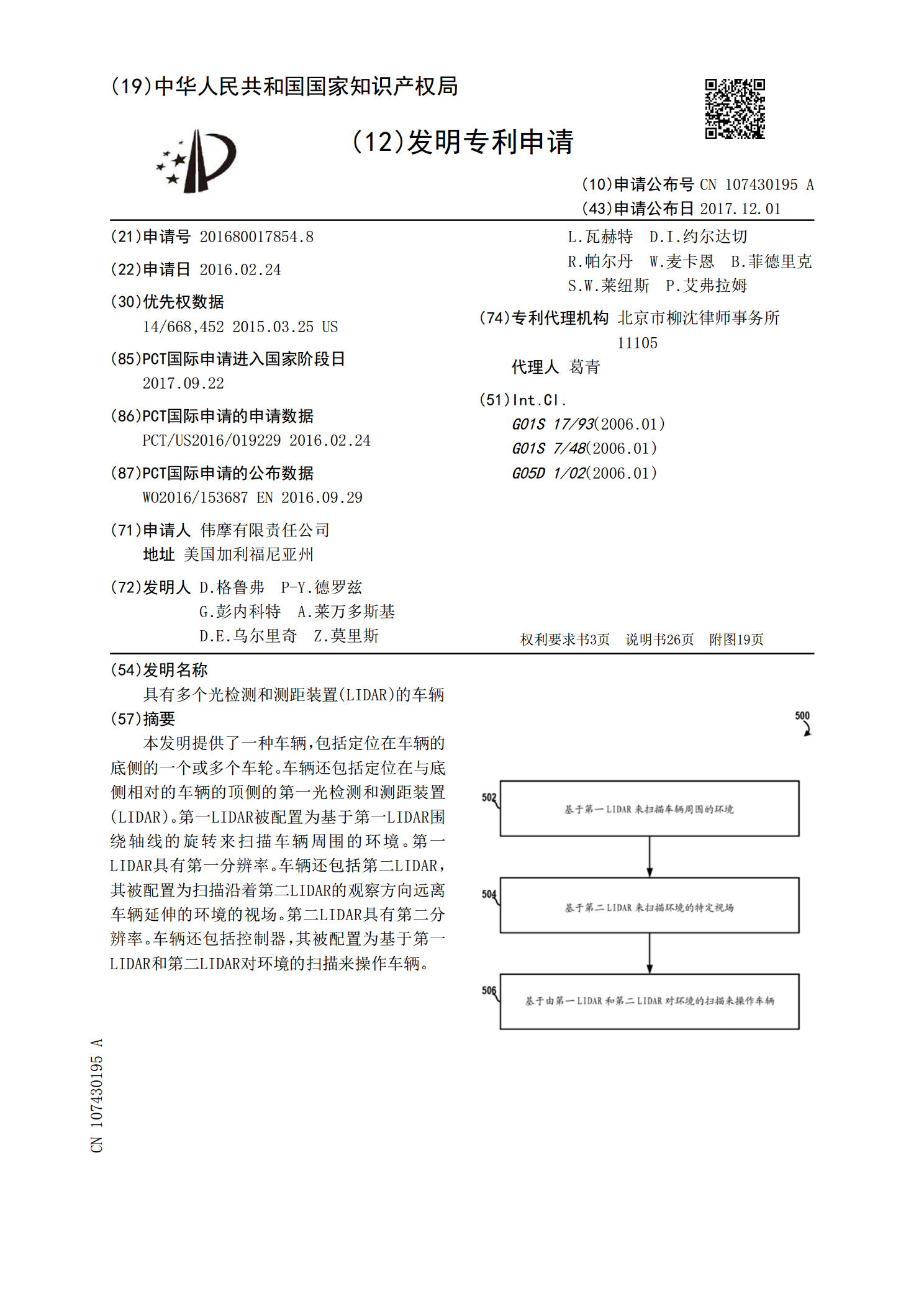
本发明提供了一种车辆,包括定位在车辆的底侧的一个或多个车轮。车辆还包括定位在与底侧相对的车辆的顶侧的第一光检测和测距装置(LIDAR)。第一LIDAR被配置为基于第一LIDAR围绕轴线的旋转来扫描车辆周围的环境。第一LIDAR具有第一分辨率。车辆还包括第二LIDAR,其被配置为扫描沿着第二LIDAR的观察方向远离车辆延伸的环境的视场。第二LIDAR具有第二分辨率。车辆还包括控制器,其被配置为基于第一LIDAR和第二LIDAR对环境的扫描来操作车辆。
具有多个光检测和测距装置(LIDAR)的车辆.pdf
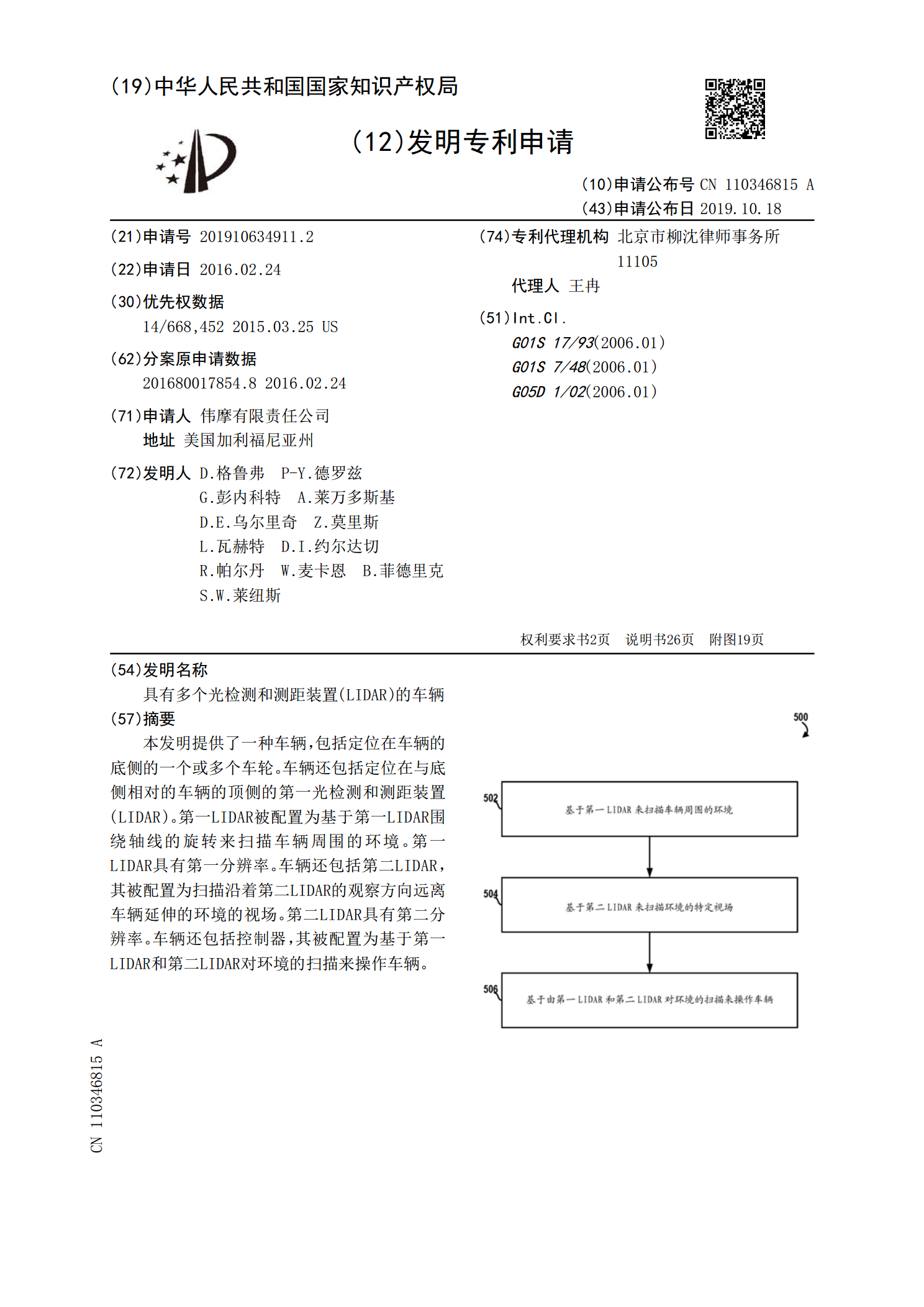
本发明提供了一种车辆,包括定位在车辆的底侧的一个或多个车轮。车辆还包括定位在与底侧相对的车辆的顶侧的第一光检测和测距装置(LIDAR)。第一LIDAR被配置为基于第一LIDAR围绕轴线的旋转来扫描车辆周围的环境。第一LIDAR具有第一分辨率。车辆还包括第二LIDAR,其被配置为扫描沿着第二LIDAR的观察方向远离车辆延伸的环境的视场。第二LIDAR具有第二分辨率。车辆还包括控制器,其被配置为基于第一LIDAR和第二LIDAR对环境的扫描来操作车辆。

光扫描设备和测距装置.pdf
光扫描设备(2)构成为具有:光模式转换器(5),其伴随着从光源(1)输出的光的波长或从光源(1)输出的光的相位的变化,对光的放射方向进行变更;以及致动器(7),其使光模式转换器(5)绕2个垂直的轴分别旋转。